物理模拟重力 斜抛运动计算 抛物线计算
- 一、介绍
- 二、原理
- 三、实现如下
- PhysicsUtil.cs 工具类
- Missile.cs
- 四、资源分享
一、介绍
模拟Unity原始重力系统进行重写,可是实现发射到指定目标位置并能继续当前力进行自身的弹力与摩擦继续运动
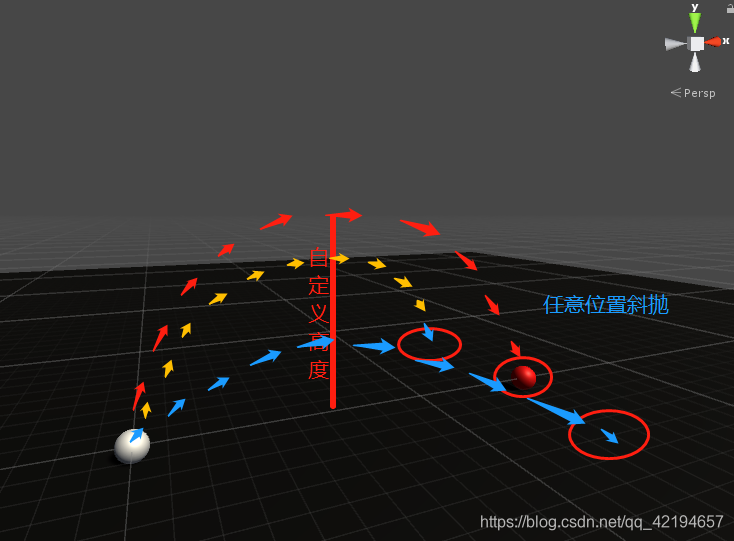
二、原理
将Unity原始不受控制的物理系统使用一个模拟重力的方式进行斜抛等操作,在其落地瞬间将模拟的重力还原给Unity的原始重力,从而达到可任意抛物线移动的物理系统
三、实现如下
PhysicsUtil.cs 工具类
using UnityEngine;
/// <summary> 物理计算工具
/// <para>ZhangYu 2018-05-10</para>
/// </summary>
public static class PhysicsUtil
{
/**findInitialVelocity
* Finds the initial velocity of a projectile given the initial positions and some offsets
* @param Vector3 startPosition - the starting position of the projectile
* @param Vector3 finalPosition - the position that we want to hit
* @param float maxHeightOffset (default=0.6f) - the amount we want to add to the height for short range shots. We need enough clearance so the
* ball will be able to get over the rim before dropping into the target position
* @param float rangeOffset (default=0.11f) - the amount to add to the range to increase the chances that the ball will go through the rim
* @return Vector3 - the initial velocity of the ball to make it hit the target under the current gravity force.
*
* Vector3 tt = findInitialVelocity (gameObject.transform.position, target.transform.position);
Rigidbody rigidbody = gameObject.GetComponent<Rigidbody> ();
Debug.Log (tt);
rigidbody.AddForce(tt*rigidbody.mass,ForceMode.Impulse);
*/
public static Vector3 GetParabolaInitVelocity(Vector3 from, Vector3 to, float gravity = 9.8f, float heightOff = 0.0f, float rangeOff = 0.11f)
{
// get our return value ready. Default to (0f, 0f, 0f)
Vector3 newVel = new Vector3();
// Find the direction vector without the y-component
/// /找到未经y分量的方向矢量//
Vector3 direction = new Vector3(to.x, 0f, to.z) - new Vector3(from.x, 0f, from.z);
// Find the distance between the two points (without the y-component)
//发现这两个点之间的距离(不y分量)//
float range = direction.magnitude;
// Add a little bit to the range so that the ball is aiming at hitting the back of the rim.
// Back of the rim shots have a better chance of going in.
// This accounts for any rounding errors that might make a shot miss (when we don't want it to).
range += rangeOff;
// Find unit direction of motion without the y component
Vector3 unitDirection = direction.normalized;
// Find the max height
// Start at a reasonable height above the hoop, so short range shots will have enough clearance to go in the basket
// without hitting the front of the rim on the way up or down.
float maxYPos = to.y + heightOff;
// check if the range is far enough away where the shot may have flattened out enough to hit the front of the rim
// if it has, switch the height to match a 45 degree launch angle
//if (range / 2f > maxYPos)
// maxYPos = range / 2f;
if (maxYPos < from.y)
maxYPos = from.y;
// find the initial velocity in y direction
/// /发现在y方向上的初始速度//
float ft;
ft = -2.0f * gravity * (maxYPos - from.y);
if (ft < 0) ft = 0f;
newVel.y = Mathf.Sqrt(ft);
// find the total time by adding up the parts of the trajectory
// time to reach the max
//发现的总时间加起来的轨迹的各部分//
//时间达到最大//
ft = -2.0f * (maxYPos - from.y) / gravity;
if (ft < 0)
ft = 0f;
float timeToMax = Mathf.Sqrt(ft);
// time to return to y-target
//时间返回到y轴的目标//
ft = -2.0f * (maxYPos - to.y) / gravity;
if (ft < 0)
ft = 0f;
float timeToTargetY = Mathf.Sqrt(ft);
// add them up to find the total flight time
//把它们加起来找到的总飞行时间//
float totalFlightTime;
totalFlightTime = timeToMax + timeToTargetY;
// find the magnitude of the initial velocity in the xz direction
/// /查找的初始速度的大小在xz方向//
float horizontalVelocityMagnitude = range / totalFlightTime;
// use the unit direction to find the x and z components of initial velocity
//使用该单元的方向寻找初始速度的x和z分量//
newVel.x = horizontalVelocityMagnitude * unitDirection.x;
newVel.z = horizontalVelocityMagnitude * unitDirection.z;
return newVel;
}
/// <summary> 计算抛物线物体在下一帧的位置 </summary>
/// <param name="position">初始位置</param>
/// <param name="velocity">移动速度</param>
/// <param name="gravity">重力加速度</param>
/// <param name="time">飞行时间</param>
/// <returns></returns>
public static Vector3 GetParabolaNextPosition(Vector3 position, Vector3 velocity, float gravity, float time)
{
velocity.y += gravity * time;
return position + velocity * time;
}
}
Missile.cs
using UnityEngine;
/// <summary>
/// 抛物线导弹
/// <para>计算弹道和转向</para>
/// <para>ZhangYu 2019-02-27</para>
/// </summary>
public class Missile : MonoBehaviour
{
public Transform target; // 目标
public float hight = 16f; // 抛物线高度
public float gravity = -9.8f; // 重力加速度
private Vector3 position; // 我的位置
private Vector3 dest; // 目标位置
private Vector3 velocity; // 运动速度
private float time = 0; // 运动时间
private void Start()
{
dest = target.position;
position = transform.position;
velocity = PhysicsUtil.GetParabolaInitVelocity(position, dest, gravity, hight, 0);
transform.LookAt(PhysicsUtil.GetParabolaNextPosition(position, velocity, gravity, Time.deltaTime));
}
private void Update()
{
// 计算位移
float deltaTime = Time.deltaTime;
position = PhysicsUtil.GetParabolaNextPosition(position, velocity, gravity, deltaTime);
transform.position = position;
time += deltaTime;
velocity.y += gravity * deltaTime;
// 计算转向
transform.LookAt(PhysicsUtil.GetParabolaNextPosition(position, velocity, gravity, deltaTime));
// 简单模拟一下碰撞检测
if (position.y <= dest.y)
{
if (Vector3.Distance(transform.position,target.position)>= 2) return;
GetComponent<Rigidbody>().useGravity = true;
GetComponent<Rigidbody>().velocity = velocity;
enabled = false;
};
}
}
四、资源分享
CSDN下载链接
在我的资源中搜索 PhysicsMissile