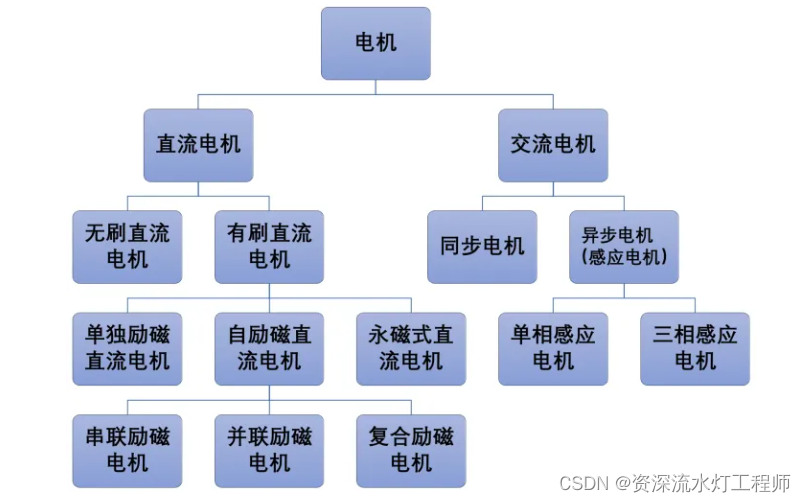
一、什么是无刷直流电机
无刷直流电机,英文名称 Brushless DC Motor,简称BLDC;
无刷直流电机的定子是线圈组,而转子是磁铁组,所以不需要用刷子把电流引到定子上,这就是无刷的来历。
电机运动的原理都是依靠磁场,要么利用磁场的异性相吸,要么利用磁场的同性互斥。
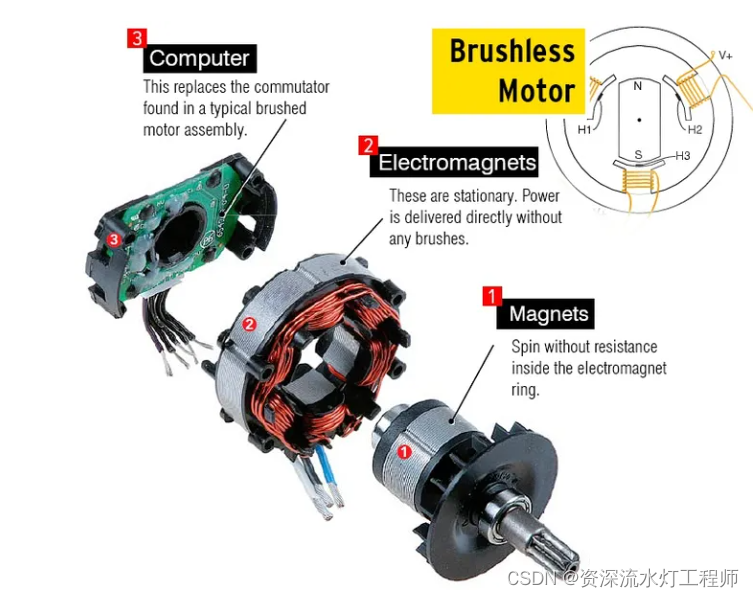
无刷直流电机和有刷直流电机的主要区别在于,无刷电机电流的大小和方向是通过控制器来改变的。通常,定子有三组绕线,和控制电路相连,控制电路通过霍尔传感器得知转轴的位置,以此来判断接下来哪几相需要通电。控制系统不停地改变通电相,并改变电流大小,来实现不同扭矩的控制。控制器的原理在本文的后面详细展开。
正因为无刷电机是通过电子换相,所以可靠性更高,运行更安静,效率也更高。
通常无刷电机可以做得很小,并且拥有高扭矩重量比,当然,因为需要使用传感器和控制器,成本也随之升高。
无刷直流电机工作原理动图
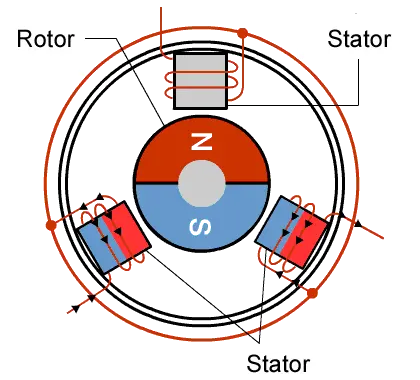
通过无刷直流电机工作原理动图可以看出,一直在转的那个玩意就是转子,也是一块磁铁;不动的部分就是定子,定子上绕有线圈,控制器可以控制线圈中电流的大小和方向,从而控制电机的转矩和转向。
二、无刷直流电机的结构图

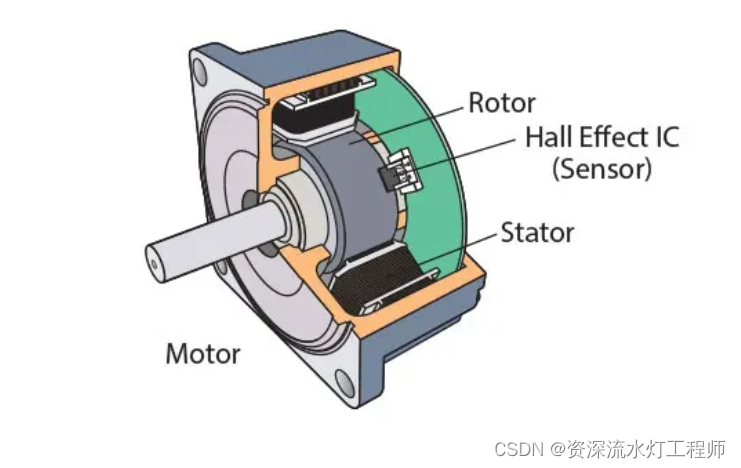
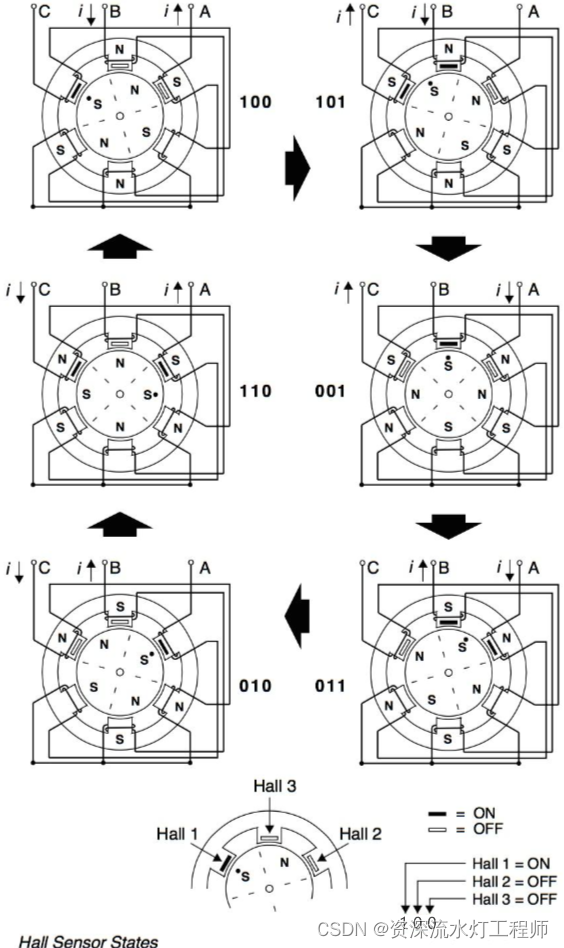
三、无刷直流电机结构分析
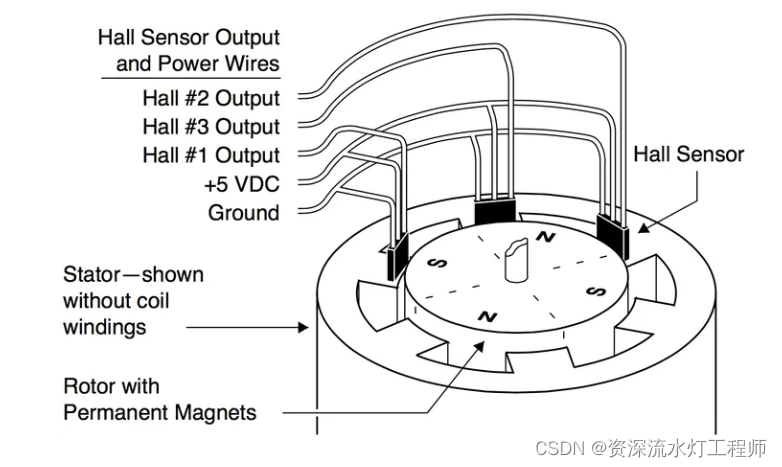

上面两幅图就是无刷直流电机简化的结构示意图,端面上有三个霍尔传感器(Hall Sensor),转子转动,形成变化的磁场,这个变化的磁场指的是方向发生了变化,而磁场的大小并没有变化。
霍尔传感器(可以先去熟悉下霍尔传感器的原理回更好)感应这个磁场,每个传感器可以输出0或者1,所以3个传感器可以输出110,101等3位数的不同组合,这些组合代表转子的不同位置。注意3号霍尔传感器在1号和2号之间。
转子是用永磁铁做成,转子转动,3个霍尔传感器被触发或者断开,感应转子的位置,然后把位置信息告诉控制器,控制器就是根据转子的位置信息来决定下一步哪些线圈通电,哪些不通电,简言之就是实现电子换相(Electrical Commutation)。
所以,这里的霍尔传感器起到沟通的作用,而这一点在有刷直流电机中,是用物理碳刷和机械换相器相互配合才得以实现。
四、霍尔传感器在直流无刷电机中的作用
有霍尔传感器,才实现了无刷,来看看三个霍尔传感器是如何感应转子的位置,然后告诉电机换相并实现连续旋转的。
如上图所示,一个磁极可以同时覆盖两个霍尔传感器,在图中所示的时刻,1号霍尔对准S极,而2号和3号霍尔对准N极,如果S极触发霍尔,N极熄灭霍尔,那么上图霍尔状态可以表示100位置。
我们再来看看更细节的情况,如下图,使电机顺时针转动:霍尔状态和线圈通电次序的关系,转子上S极附近有个小黑点,用来表示转子的转动方向。
驱动器一次给两组线圈通电,另一组线圈不通电,这个在文章前面的动图可以看出来。
按照惯例,电流流入的线圈在定子上产生北极磁场N,电流流出的线圈则在定子上产生南极磁场S。
现在,想要实现顺时针旋转,如何使用霍尔状态,来切换线圈通电次序和通电方向?
举例说明,比如霍尔感应是100状态,也就是上面的第一张图时,那么这个时候告诉驱动器接通AB相,且电流从B相流入,A相流出。这样B线圈组形成N极,A线圈组形成S极。线圈N极和与其正对的转子N极相互排斥,并且吸引和它较近的转子S极,而线圈S极,则吸引转子N极,实现顺时针转动。同理,可以推导其他霍尔状态时,线圈应该如何通电。最后就形成如上图所示的6个霍尔状态,以及在此状态下线圈应该从哪个线圈流入,从哪个线圈流出的顺序图。
如果把霍尔时序和绕组通电顺序及方向,画在一张图上,就是下面这幅图,这个理解起来要轻松一点。
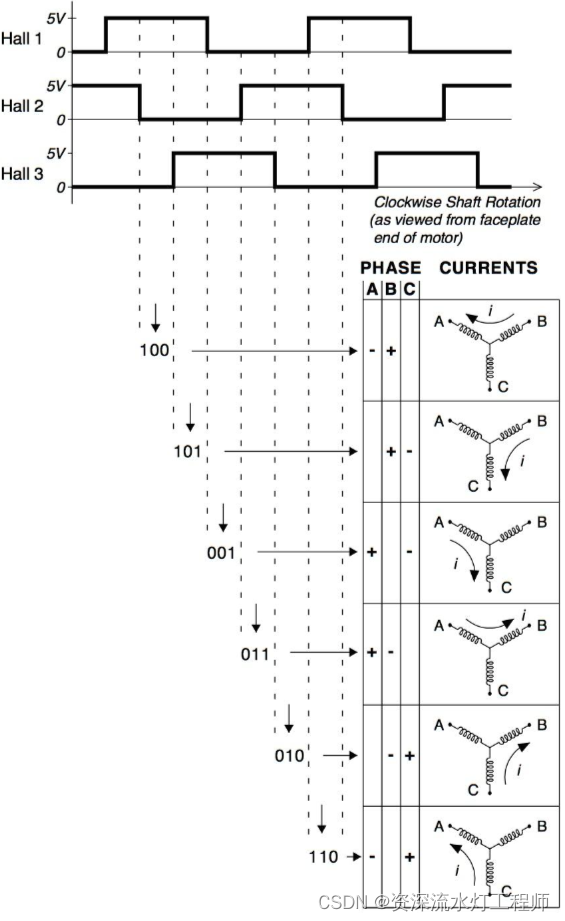
理解了这两幅图,也就理解了无刷直流电机的工作原理。
![[山东大学操作系统课程设计]实验四+实验五](https://img-blog.csdnimg.cn/direct/e17445bb444140aa96f9f9d36886f034.png)





![[MySQL--进阶篇]存储引擎的体系结构、简介、特点、选择](https://img-blog.csdnimg.cn/direct/50cc2961e2644b7da434db26b72dfdef.gif#pic_center)