HDMI 彩条显示实验
本次实验参考自 《正点原子 FPGA 领航者开发板 第三十一章 彩条显示实验》
使用的是领航者开发板 ZYNQ - 7020
HDMI 是新一代的多媒体接口标准,英文全称是 High-Definition Multimedia Interface,即高清多媒体接口。它能够同时传输视频和音频,简化了设备的接口和连线;同时提供了更高的数据传输带宽,可以传输无压缩的数字音频及高分辨率视频信号。HDMI 1.0 版本于 2002 年发布,最高数据传输速度为 5Gbps;HDMI2.0版本于 2013 年推出的,2.0 理论传输速度能达到 18Gbit/s,实际传输速度能达到 14.4Gbit/s;而 2017 年发布的 HDMI 2.1 标准的理论带宽可达 48Gbps,实际速度也能达到 42.6Gbit/s。在 HDMI 接口出现之前,被广泛应用的是 VGA 接口。VGA 的全称是 Video Graphics Array,即视频图形阵列,是一个使用模拟信号进行视频传输的标准。VGA 接口采用 15 针插针式结构,里面传输模拟信号颜色分量、同步等信号,是很多老显卡、笔记本和投影仪所使用的接口。由于 VGA 接口传输的是模拟信号,其信号容易受到干扰,因此 VGA 在高分辨率下字体容易虚,信号线长的话,图像有拖尾现象。
HDMI 向下兼容 DVI,但是 DVI(数字视频接口)只能用来传输视频,而不能同时传输音频,这是两者最主要的差别。此外,DVI 接口的尺寸明显大于 HDMI 接口。

左侧是 DVI 接口 右侧是 HDMI 接口
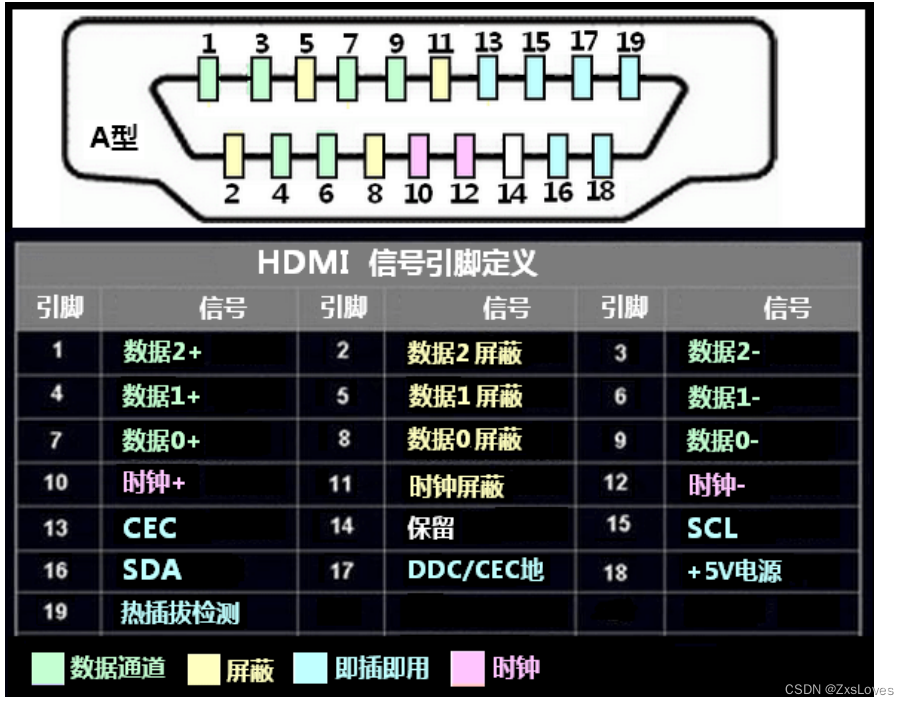
DVI 和 HDMI 接口协议在物理层使用 TMDS 标准传输音视频数据。TMDS(Transition Minimized Differential Signaling,最小化传输差分信号)是美国 Silicon Image 公司开发的一项高速数据传输技术,在DVI 和 HDMI 视频接口中使用差分信号传输高速串行数据。TMDS 差分传输技术使用两个引脚(如图 31.1.3中的“数据 2+”和“数据 2-”)来传输一路信号,利用这两个引脚间的电压差的正负极性和大小来决定传输数据的数值(0 或 1)。
由于本次实验只是使用 HDMI 接口来显示图像,不需要传输音频,因此我们只需要实现 DVI 接口的驱动逻辑即可。不过在此之前我们还需要简单地了解一下 TMDS 视频传输协议。
DVI 或 HDMI 视频传输所使用的 TMDS 连接通过四个串行通道实现。对于 DVI 来说,其中三个通道分别用于传输视频中每个像素点的红、绿、蓝三个颜色分量(RGB 4:4:4 格式)。HDMI 默认也是使用三个 RGB 通道,但是它同样可以选择传输像素点的亮度和色度信息(YCrCb 4:4:4 或 YCrCb 4:2:2 格式)。第四个通道是时钟通道,用于传输像素时钟。独立的 TMDS时钟通道为接收端提供接收的参考频率,保证数据在接收端能够正确恢复。
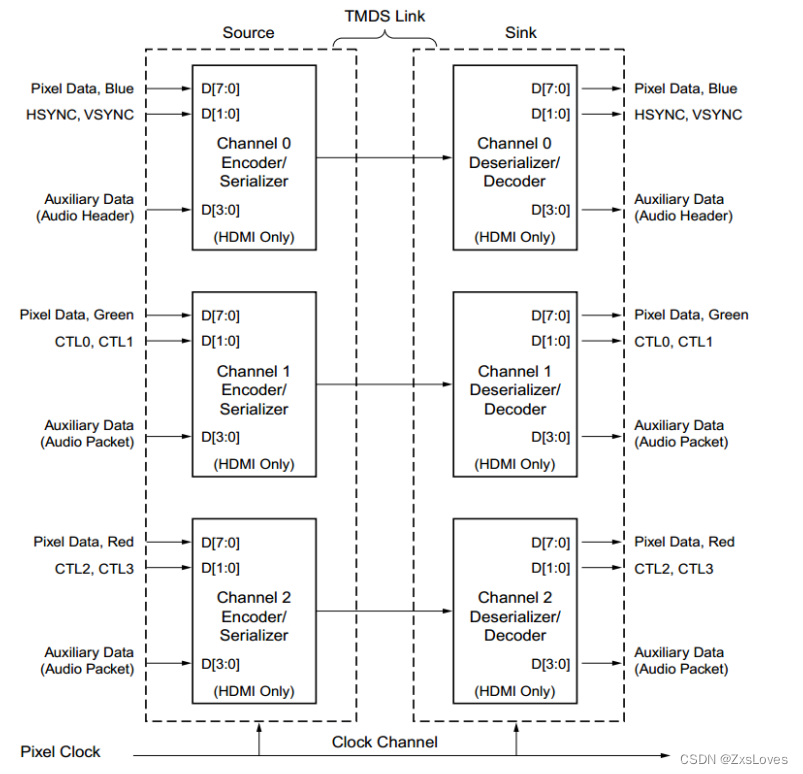
如果每个像素点的颜色深度为 24 位,即 RGB 每个颜色分量各占 8 位,那么每个通道上的颜色数据将通过编码器来转换成一个 10 位的像素字符。然后这个 10 位的字符通过并串转换器转换成串行数据,最后由 TMDS 数据通道发送出去。这个 10:1 的并转串过程所生成的串行数据速率是实际像素时钟速率的 10 倍。在传输视频图像的过程中,数据通道上传输的是编码后的有效像素字符。而在每一帧图像的行与行之间,以及视频中不同帧之间的时间间隔(消隐期)内,数据通道上传输的则是控制字符。每个通道上有两位控制信号的输入接口,共对应四种不同的控制字符。这些控制字符提供了视频的行同步(HSYNC)以及帧同步(VSYNC)信息,也可以用来指定所传输数据的边界(用于同步)。对于 DVI 传输,整个视频的消隐期都用来传输控制字符。而 HDMI 传输的消隐期除了控制字符之外,还可以用于传输音频或者其他附加数据,比如字幕信息等。这就是 DVI 和 HDMI 协议之间最主要的差别。从图 31.1.4 中也可以看出这一差别,即“Auxiliary Data”接口标有“HDMI Only”,即它是 HDMI 所独有的接口。
从前面的介绍中我们可以看出,TMDS 连接从逻辑功能上可以划分成两个阶段:编码和并串转换。
在编码阶段,编码器将视频源中的像素数据、HDMI 的音频/附加数据,以及行同步和场同步信号分别编码成 10位的字符流。然后在并串转换阶段将上述的字符流转换成串行数据流,并将其从三个差分输出通道发送出去。
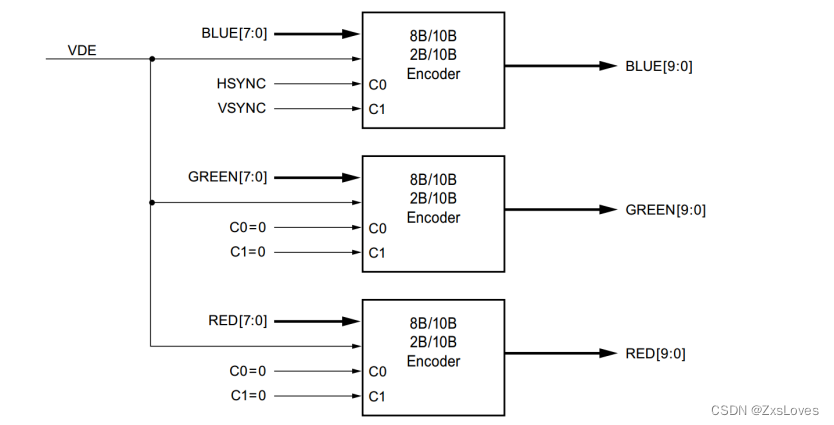
DVI 编码器在视频有效数据段输出像素数据,在消隐期输出控制数据。其中 VDE(Video Data Enable)为高电平时表示视频数据有效,为低电平代表当前处于视频消隐期。

下图 出了三个通道的 DVI 编码器示意图。对于像素数据的 RGB 三个颜色通道,编码器的逻辑是完全相同的。VDE 用于各个通道选择输出视频像素数据还是控制数据,HSYNC 和 VSYNC 信号在蓝色通道进行编码得到 10 位字符,然后在视频消隐期传输。绿色和红色通道的控制信号 C0 和 C1 同样需要进行编码,并在消隐期输出。但是 DVI 规范中这两个通道的控制信号是预留的(未用到),因此将其置为 2’b00。
视频或者 图片数据 对于RGB888 我们对于数据通道 8bit 8位的数据 先把它通过编码 编成460个特定的 10 bit 字符中的一个 。
有人会想8转10位 不是有很多嘛 为什么这里限定460个 那肯定是有原因的 。这个编码机制大致上实现了传输过程中的直流平衡,即一段时间内传输的高电平(数字“1”)的个数大致等于低电平(数字“0”)的个数。 。同时,每个编码后的 10-bit字符中状态跳转(“由 1 到 0”或者“由 0 到 1”)的次数将被限制在五次以内。
每个通道 2-bit 控制信号的状态也要进行编码,编码后分别对应四个不同的 10-bit控制字符,分别是 10’b1101010100,10’b0010101011,10’b0101010100,和 10’b1010101011。可以看出,每个控制字符都有七次以上的状态跳转。视频字符和控制字符状态跳转次数的不同将会被用于发送和接收设备的同步。
HDMI 协议与 DVI 协议在很多方面都是相同的,包括物理连接(TMDS)、有效视频编码算法以及控制字符的定义等。但是,相比于 DVI,HDMI 在视频的消隐期会传输更多的数据,包括音频数据和附加数据。4-bit 音频和附加数据将通过 TERC4 编码机制转换成 10-bit TERC4 字符,然后在绿色和红色通道上传输。
HDMI 在输入附加数据的同时,还需要输入 ADE(Aux/Audio Data Enable)信号,其作用和 VDE 是类似的:当 ADE 为高电平时,表明输入端的附加数据或者音频数据有效。为了简单起见,我们在这里把 HDMI接口当作 DVI 接口进行驱动。
在编码之后 3 个通道的 10-bit 字符将进行并串转换,这一过程是使用 7 系列 FPGA 中专用的硬件资源来实现的。ZYNQ PL 部分与 7 系列的 FPGA 是等价的,它提供了专用的并串转换器——OSERDESE2。单一的 OSERDESE2 模块可以实现 8:1 的并串转换,通过位宽扩展可以实现 10:1 和 14:1 的转换率。
下面是 领航者 开发板 底板的 RGB TFT-LCD 接口原理图
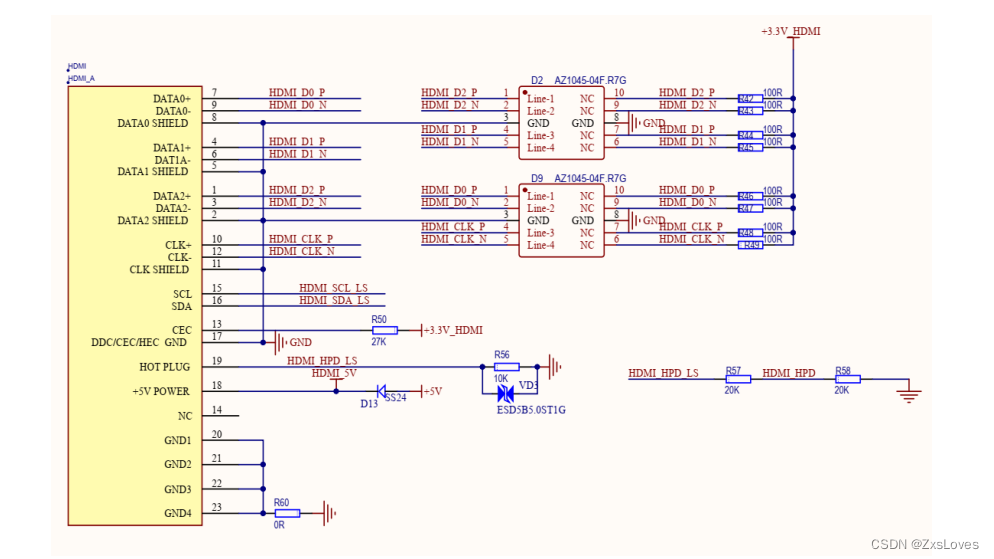
ZYNQ 底板 HDMI 接口原理图的一部分,其中 HDMI 的三个数据通道 HDMI_D[2:0]和一个时钟通道 HDMI_CLK 直接与 ZYNQ PL 端的 TMDS 差分引脚相连。
D2 和 D9 为 AZ1045-04F 瞬态抑制二极管(TVS),用于保护高速数据接口。AZ1045-04F 是一种独特的设计,包括 ESD 额定、超低容量转向二极管和箝位单元的独特设计,箝位单元是单个封装中的等效 TVS 二极管。在瞬态条件下,转向二极管将瞬态引导至内部 ESD 线路或接地线。
HDMI_HPD 指的是热拔插检测(Hot Plug Detect),当视频设备与接收设备通过 HDMI 连接时,接收设备将 HPD 置为高电平,通知发送设备。当发送设备检测到 HPD 为低电平时,表明断开连接。HDMI_HPD通过 R57 与 R58 两个电阻实现分压转换。
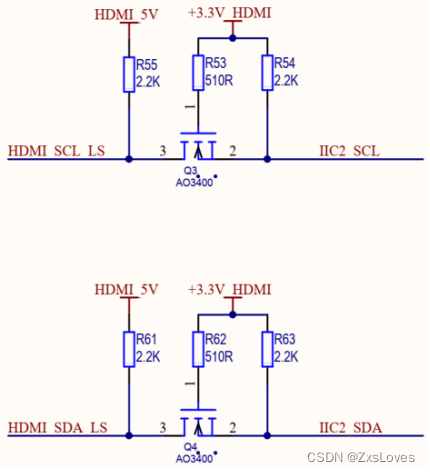
HDMI_SCL_LS 和 HDMI_SDA_LS 是 HDMI 接口的显示数据通道(DDC,Display Data Channel),用于 HDMI 发送端和接收端之间交换一些配置信息,通过 I2C 协议通信。发送端通过 DDC 通道,读取接收端保存在 HDMI 显示器 EEPROM 中的 EDID 数据,获取接收端的信息,确认接收端终端显示的设置和功能,决定跟接收端之间以什么格式传输音/视频数据。需要说明的是,HDMI 的 IIC 引脚是 5V 电平的,需要将其转换为 ZYNQ PL 端所需的 3.3V 电压。其中,IIC2_SCL 和 IIC2_SDA 连接到 ZYNQ PL 侧的 IO 口上,HDMI_SCL_LS 和 HDMI_SDA_LS 连接到 HDMI 插座上。当总线空闲即 IIC2_SCL 和 IIC2_SDA 都被 ZYNQ 驱动为高电平时,MOS 管截止,HDMI_SCL_LSHDMI_SDA_LS 也被上拉电阻 R55 和 R61 上拉到+5V 的高电平。当 IIC2_SCL 或 IIC2_SDA被 ZYNQ 驱动为低电平时,MOS 管导通,此时 HDMI_SCL_LS 或 HDMI_SDA_LS 也被下拉到了 GND。若HDMI_SDA_LS 需要向 ZYNQ 发送低电平时,HDMI_SDA_LS 为低,MOS 管内部二极管导通 IIC2_SDA 被下拉到了低电平。以此实现了双向电平转换的功能。
这些都不是 很重要的点 大概熟知就行
接下来 了解本次实验的目的
驱动 ZYNQ 开发板上的 HDMI 接口,在显示器上显示 720p 彩条图案(720p 分辨率为 1280*800,像素时钟大约为 75MHz)。
本次实验在 LCD 彩条显示实验的基础上添加一个 RGB2DVI 模块,将 RGB888 格式的视频图像转换成TMDS 数据输出。
我们在上次的 设计中已经完成了RGB_LCD 相关的数据传输 现在 我们想把 RGB888 的 格式 转换成 TMDS 数据输出
我们 现在 先 讲述一下 top.v
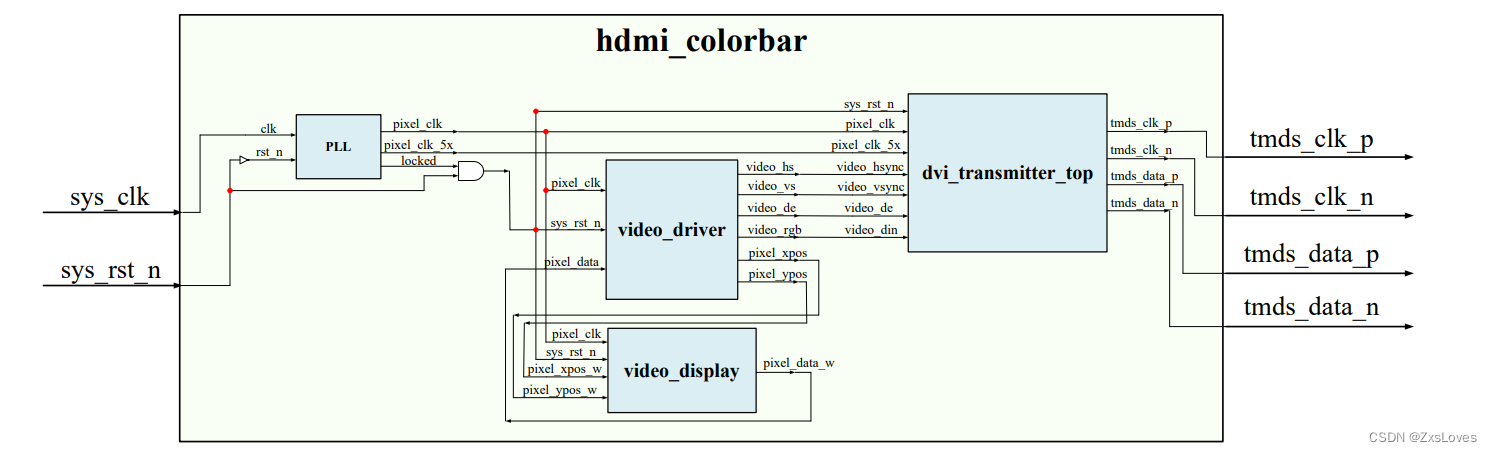
我们 可以看出相对于之前 的 RGB 彩屏幕 我们修改变化的 只是 最后的 传出的 RGB_data 我们需要的是 把这个数据 转化成 TMDS 所需要的 只是整个结构 需要的东西
现在我们 分析一下
单独的模块
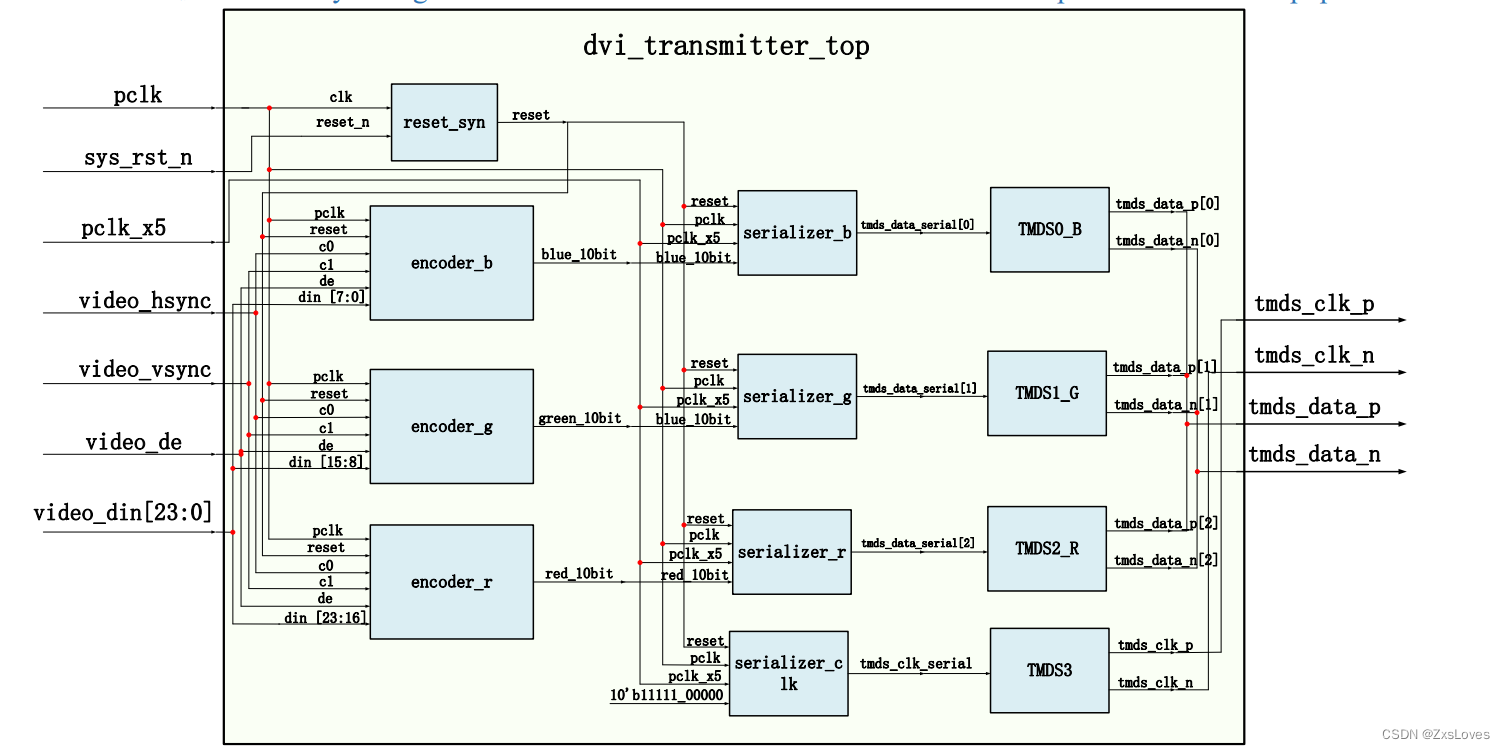
对于 顶层之下的 dvi_transmitter_top 分析
这个 top 用到 了
关键的结构 RZGB2DVI
我们可以看到
我们剖析可以从简单的入手 简单的逻辑下
只有 3种 因为其实 这三块 都是 重复的
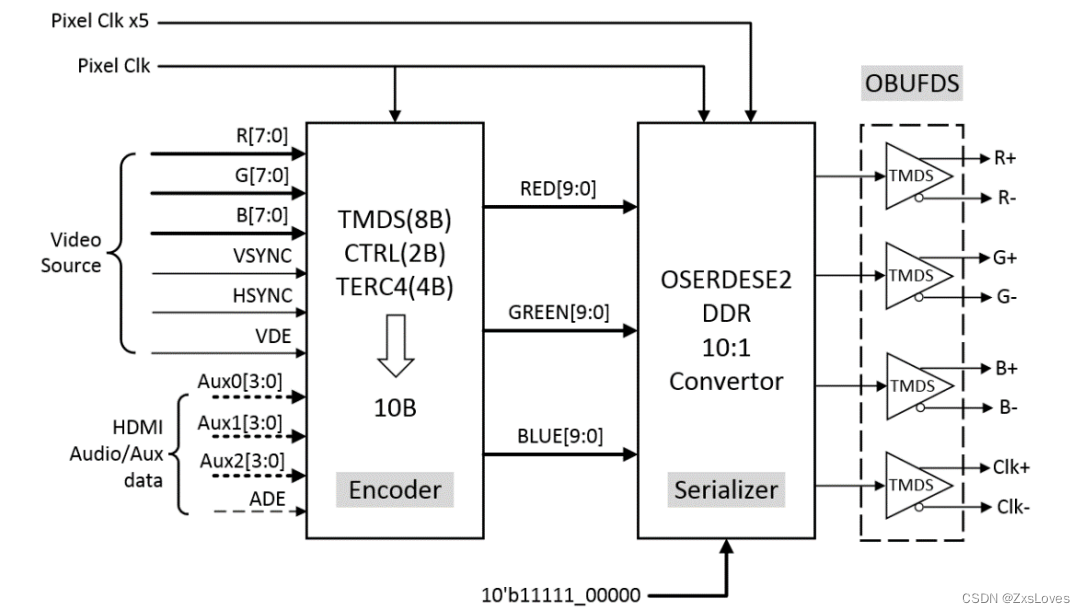
我们 可以 把它分为 三块 第一块是 编码部分 第二部分是 Serializer 模块 是 并转串转换 第三部分 就是 通过 OBUFDS 转换成 TMDS 差分信号传输
整个系统需要两个输入时钟,一个是视频的像素时钟 Pixel Clk,另外一个时钟 Pixel Clk x5 的频率是像素时钟的五倍。由前面的简介部分我们知道,并串转换过程的实现的是 10:1 的转换率,理论上转换器需要一个 10 倍像素时钟频率的串行时钟。这里我们只用了一个 5 倍的时钟频率,这是因为 OSERDESE2 模块可以实现 DDR 的功能,即它在五倍时钟频率的基础上又实现了双倍数据速率。TMDS 连接的时钟通道我们采用与数据通道相同的并转串逻辑来实现。通过对 10 位二进制序列10’b11111_00000 在 10 倍像素时钟频率下进行并串转换,就可以得到像素时钟频率下的 TMDS 参考时钟。OSERDESE2 模块要求复位信号高电平有效,并且需要将异步复位信号同步到并行时钟域。因此,我们生成一个同步复位模块,将低电平有效的异步复位信号转换成高有效,同时对其进行异步复位,同步释放处理。
下面是 我们 对于 整个 dvi_transmitter_top 进行分析
module dvi_transmitter_top(
input pclk, // pixel clock
input pclk_x5, // pixel clock x5
input reset_n, // reset
input [23:0] video_din, // RGB888 video in
input video_hsync, // hsync data
input video_vsync, // vsync data
input video_de, // data enable
output tmds_clk_p, // TMDS 时钟通道
output tmds_clk_n,
output [2:0] tmds_data_p, // TMDS 数据通道
output [2:0] tmds_data_n,
output tmds_oen // TMDS 输出使能
);
//wire define
wire reset;
//并行数据
wire [9:0] red_10bit;
wire [9:0] green_10bit;
wire [9:0] blue_10bit;
wire [9:0] clk_10bit;
//串行数据
wire [2:0] tmds_data_serial;
wire tmds_clk_serial;
//*****************************************************
//** main code
//*****************************************************
assign tmds_oen = 1'b1;
assign clk_10bit = 10'b1111100000;
//异步复位,同步释放
asyn_rst_syn reset_syn(
.reset_n (reset_n),
.clk (pclk),
.syn_reset (reset) //高有效
);
//对三个颜色通道进行编码
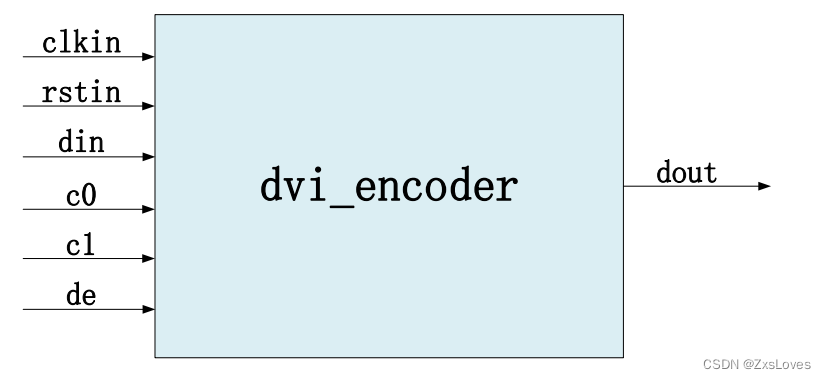
dvi_encoder encoder_b (
.clkin (pclk),
.rstin (reset),
.din (video_din[7:0]),
.c0 (video_hsync),
.c1 (video_vsync),
.de (video_de),
.dout (blue_10bit)
) ;
dvi_encoder encoder_g (
.clkin (pclk),
.rstin (reset),
.din (video_din[15:8]),
.c0 (1'b0),
.c1 (1'b0),
.de (video_de),
.dout (green_10bit)
) ;
dvi_encoder encoder_r (
.clkin (pclk),
.rstin (reset),
.din (video_din[23:16]),
.c0 (1'b0),
.c1 (1'b0),
.de (video_de),
.dout (red_10bit)
) ;
//对编码后的数据进行并串转换
serializer_10_to_1 serializer_b(
.reset (reset), // 复位,高有效
.paralell_clk (pclk), // 输入并行数据时钟
.serial_clk_5x (pclk_x5), // 输入串行数据时钟
.paralell_data (blue_10bit), // 输入并行数据
.serial_data_out (tmds_data_serial[0]) // 输出串行数据
);
serializer_10_to_1 serializer_g(
.reset (reset),
.paralell_clk (pclk),
.serial_clk_5x (pclk_x5),
.paralell_data (green_10bit),
.serial_data_out (tmds_data_serial[1])
);
serializer_10_to_1 serializer_r(
.reset (reset),
.paralell_clk (pclk),
.serial_clk_5x (pclk_x5),
.paralell_data (red_10bit),
.serial_data_out (tmds_data_serial[2])
);
serializer_10_to_1 serializer_clk(
.reset (reset),
.paralell_clk (pclk),
.serial_clk_5x (pclk_x5),
.paralell_data (clk_10bit),
.serial_data_out (tmds_clk_serial)
);
//转换差分信号
OBUFDS #(
.IOSTANDARD ("TMDS_33") // I/O电平标准为TMDS
) TMDS0 (
.I (tmds_data_serial[0]),
.O (tmds_data_p[0]),
.OB (tmds_data_n[0])
);
OBUFDS #(
.IOSTANDARD ("TMDS_33") // I/O电平标准为TMDS
) TMDS1 (
.I (tmds_data_serial[1]),
.O (tmds_data_p[1]),
.OB (tmds_data_n[1])
);
OBUFDS #(
.IOSTANDARD ("TMDS_33") // I/O电平标准为TMDS
) TMDS2 (
.I (tmds_data_serial[2]),
.O (tmds_data_p[2]),
.OB (tmds_data_n[2])
);
OBUFDS #(
.IOSTANDARD ("TMDS_33") // I/O电平标准为TMDS
) TMDS3 (
.I (tmds_clk_serial),
.O (tmds_clk_p),
.OB (tmds_clk_n)
);
endmodule
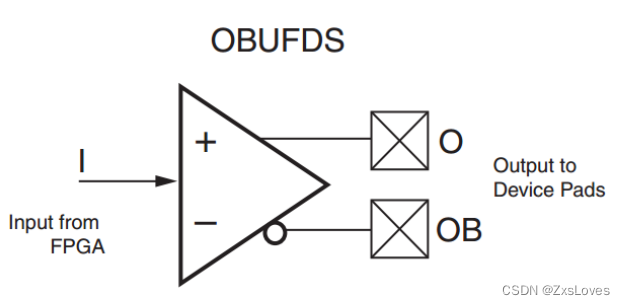
在这其中 在 dvi_transmitter_top 模块中,不仅例化了编码模块和并转串模块,同时还例化了四个 OBUFDS 原语,用于将三路数据和一路时钟信号转换成差分信号输出,如程序第 116 至 147 行所示。OBUFDS 是差分输出缓冲器,用于将来自 FPGA 内部逻辑的信号转换成差分信号输出,支持 TMDS电平标准。
OBUFDS 原语示意图 如下
因为上面我们做的步骤仅仅是对 关键模块进行例化 并没有完整的 掌握 设计结构
现在我们 要做的是 构建 下面的 编码模块 dvi_encoder 编码模块就是为了完成 RGB 图像数据 8b 转 10b 的编码
我们 编码 还是按照 xilinx 给出的 官方编码方法进行 编译
下面是 整个 TMDS 编码算法 的 官方手册 流程图 如下所示
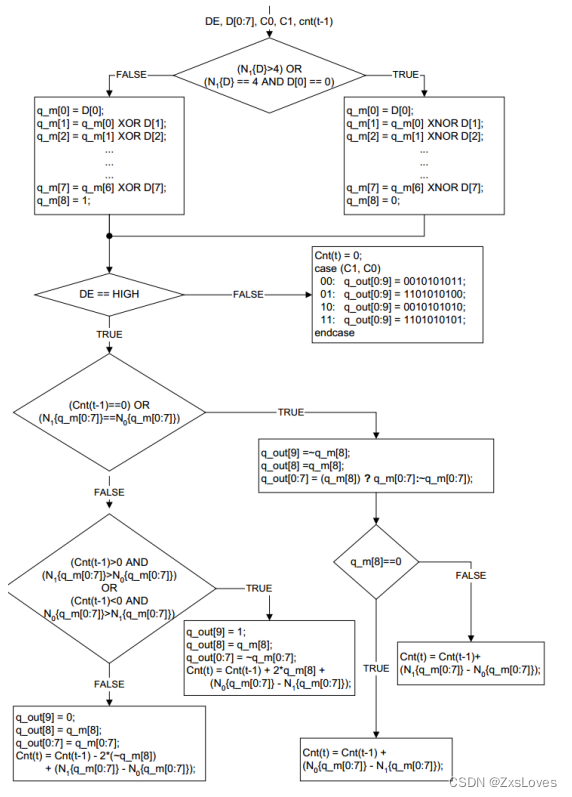
TMDS 通过逻辑算法将 8 位字符数据通过编码转换为 10 位字符数据,前 8 位数据由原始信号经运算后获得,第 9 位表示运算的方式,1 表示异或 0 表示异或非。经过 DC 平衡后(第 10 位),采用差分信号传输数据。第 10 位实际是一个反转标志位,1 表示进行了反转而 0 表示没有反转,从而达到 DC 平衡。接收端在收到信号后,再进行相反的运算。TMDS 和 LVDS、TTL 相比有较好的电磁兼容性能。这种算法可以减小传输信号过程的上冲和下冲,而 DC 平衡使信号对传输线的电磁干扰减少,可以用低成本的专用电缆实现长距离、高质量的数字信号传输。
下面是进行编码的 div_encoder
module dvi_encoder (
input clkin, // pixel clock input
input rstin, // async. reset input (active high)
input [7:0] din, // data inputs: expect registered
input c0, // c0 input
input c1, // c1 input
input de, // de input
output reg [9:0] dout // data outputs
);
// Counting number of 1s and 0s for each incoming pixel
// component. Pipe line the result.
// Register Data Input so it matches the pipe lined adder
// output
reg [3:0] n1d; //number of 1s in din
reg [7:0] din_q;
//计算像素数据中“1”的个数
always @ (posedge clkin) begin
n1d <=#1 din[0] + din[1] + din[2] + din[3] + din[4] + din[5] + din[6] + din[7];
din_q <=#1 din;
end
///
// Stage 1: 8 bit -> 9 bit
// Refer to DVI 1.0 Specification, page 29, Figure 3-5
///
wire decision1;
assign decision1 = (n1d > 4'h4) | ((n1d == 4'h4) & (din_q[0] == 1'b0));
wire [8:0] q_m;
assign q_m[0] = din_q[0];
assign q_m[1] = (decision1) ? (q_m[0] ^~ din_q[1]) : (q_m[0] ^ din_q[1]);
assign q_m[2] = (decision1) ? (q_m[1] ^~ din_q[2]) : (q_m[1] ^ din_q[2]);
assign q_m[3] = (decision1) ? (q_m[2] ^~ din_q[3]) : (q_m[2] ^ din_q[3]);
assign q_m[4] = (decision1) ? (q_m[3] ^~ din_q[4]) : (q_m[3] ^ din_q[4]);
assign q_m[5] = (decision1) ? (q_m[4] ^~ din_q[5]) : (q_m[4] ^ din_q[5]);
assign q_m[6] = (decision1) ? (q_m[5] ^~ din_q[6]) : (q_m[5] ^ din_q[6]);
assign q_m[7] = (decision1) ? (q_m[6] ^~ din_q[7]) : (q_m[6] ^ din_q[7]);
assign q_m[8] = (decision1) ? 1'b0 : 1'b1;
/
// Stage 2: 9 bit -> 10 bit
// Refer to DVI 1.0 Specification, page 29, Figure 3-5
/
reg [3:0] n1q_m, n0q_m; // number of 1s and 0s for q_m
always @ (posedge clkin) begin
n1q_m <=#1 q_m[0] + q_m[1] + q_m[2] + q_m[3] + q_m[4] + q_m[5] + q_m[6] + q_m[7];
n0q_m <=#1 4'h8 - (q_m[0] + q_m[1] + q_m[2] + q_m[3] + q_m[4] + q_m[5] + q_m[6] + q_m[7]);
end
parameter CTRLTOKEN0 = 10'b1101010100;
parameter CTRLTOKEN1 = 10'b0010101011;
parameter CTRLTOKEN2 = 10'b0101010100;
parameter CTRLTOKEN3 = 10'b1010101011;
reg [4:0] cnt; //disparity counter, MSB is the sign bit
wire decision2, decision3;
assign decision2 = (cnt == 5'h0) | (n1q_m == n0q_m);
/
// [(cnt > 0) and (N1q_m > N0q_m)] or [(cnt < 0) and (N0q_m > N1q_m)]
/
assign decision3 = (~cnt[4] & (n1q_m > n0q_m)) | (cnt[4] & (n0q_m > n1q_m));
// pipe line alignment
reg de_q, de_reg;
reg c0_q, c1_q;
reg c0_reg, c1_reg;
reg [8:0] q_m_reg;
always @ (posedge clkin) begin
de_q <=#1 de;
de_reg <=#1 de_q;
c0_q <=#1 c0;
c0_reg <=#1 c0_q;
c1_q <=#1 c1;
c1_reg <=#1 c1_q;
q_m_reg <=#1 q_m;
end
///
// 10-bit out
// disparity counter
///
always @ (posedge clkin or posedge rstin) begin
if(rstin) begin
dout <= 10'h0;
cnt <= 5'h0;
end else begin
if (de_reg) begin
if(decision2) begin
dout[9] <=#1 ~q_m_reg[8];
dout[8] <=#1 q_m_reg[8];
dout[7:0] <=#1 (q_m_reg[8]) ? q_m_reg[7:0] : ~q_m_reg[7:0];
cnt <=#1 (~q_m_reg[8]) ? (cnt + n0q_m - n1q_m) : (cnt + n1q_m - n0q_m);
end else begin
if(decision3) begin
dout[9] <=#1 1'b1;
dout[8] <=#1 q_m_reg[8];
dout[7:0] <=#1 ~q_m_reg[7:0];
cnt <=#1 cnt + {q_m_reg[8], 1'b0} + (n0q_m - n1q_m);
end else begin
dout[9] <=#1 1'b0;
dout[8] <=#1 q_m_reg[8];
dout[7:0] <=#1 q_m_reg[7:0];
cnt <=#1 cnt - {~q_m_reg[8], 1'b0} + (n1q_m - n0q_m);
end
end
end else begin
case ({c1_reg, c0_reg})
2'b00: dout <=#1 CTRLTOKEN0;
2'b01: dout <=#1 CTRLTOKEN1;
2'b10: dout <=#1 CTRLTOKEN2;
default: dout <=#1 CTRLTOKEN3;
endcase
cnt <=#1 5'h0;
end
end
end
endmodule
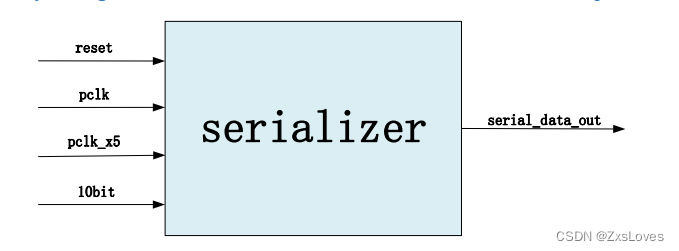
下面是 编码完了 进行并转串的接口 Serializer
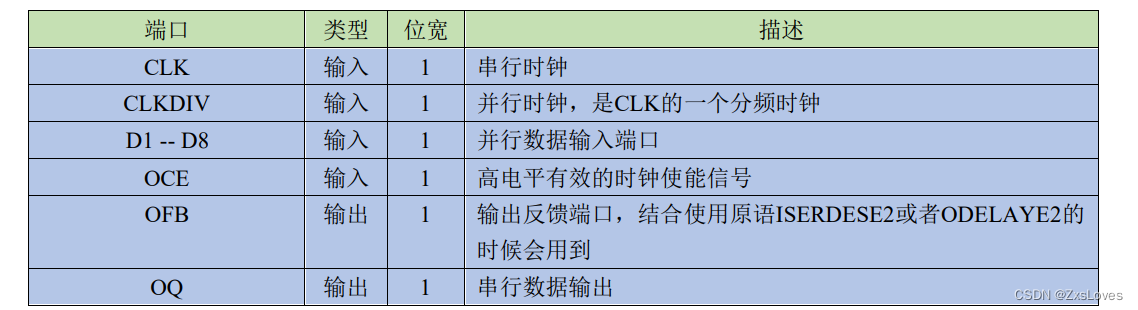
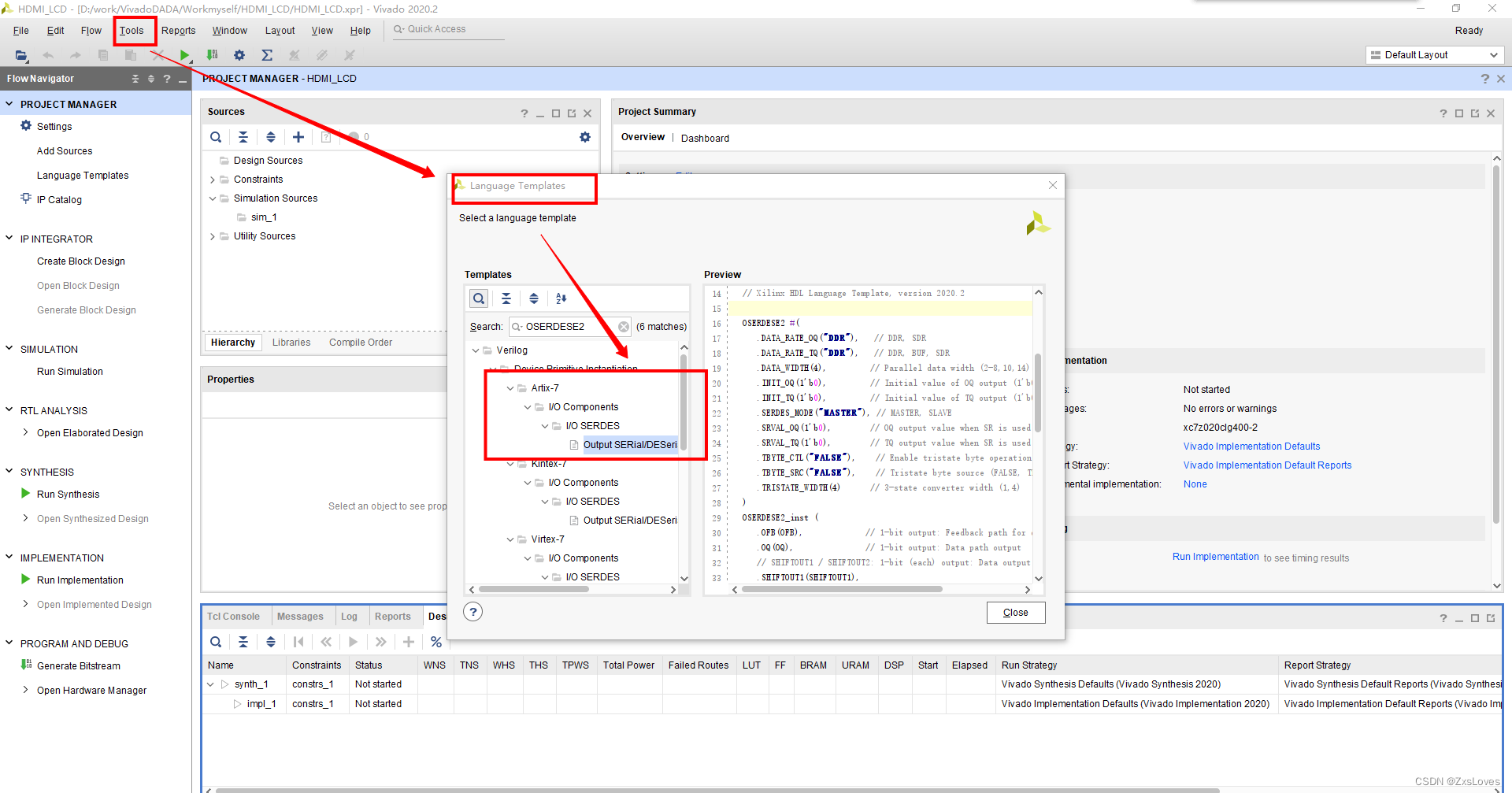
OSERDESE2 原语调用
OSERDESE2 是一种专用的并-串转换器,每个 OSERDESE2 模块都包括一个专用串行化程序用于数据和 3 状态控制。数据和 3 状态序列化程序都可以工作在 SDR 和 DDR 模式。数据串行化的位宽可以达到 8:1(如果使用原语模块级联,则可以到 10:1 和 14:1)。3 状态序列化最高可达 14:1,有一个专用的 DDR3 模式可用于支持高速内存应用程序
下面是 OSERESE2 的 框图
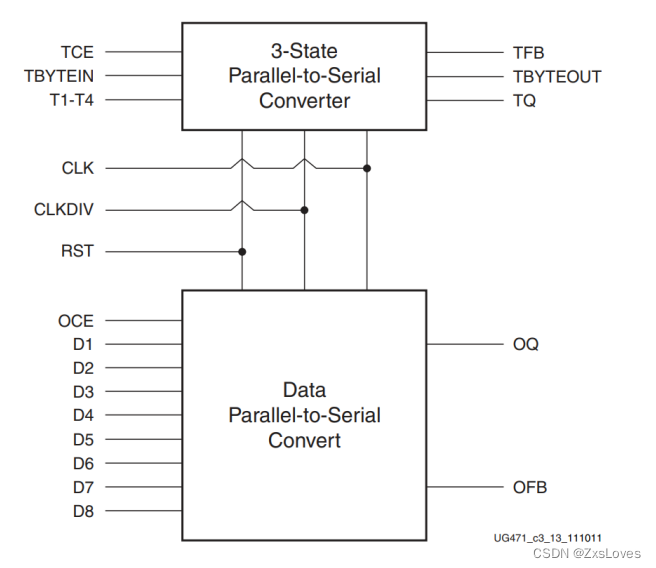
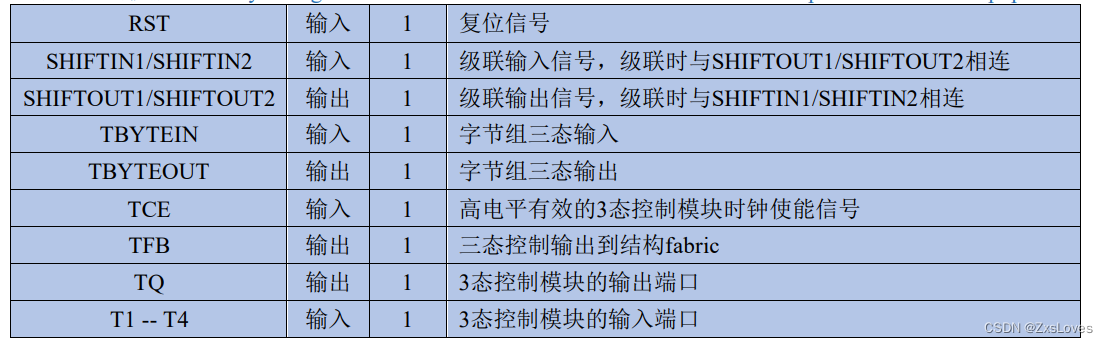
下面是 OSERDESE2 的 端口 使用说明
一个 OSERDESE2 只能实现最多 8:1 的转换率,在这里我们通过位宽扩展实现了 10:1的并串转换
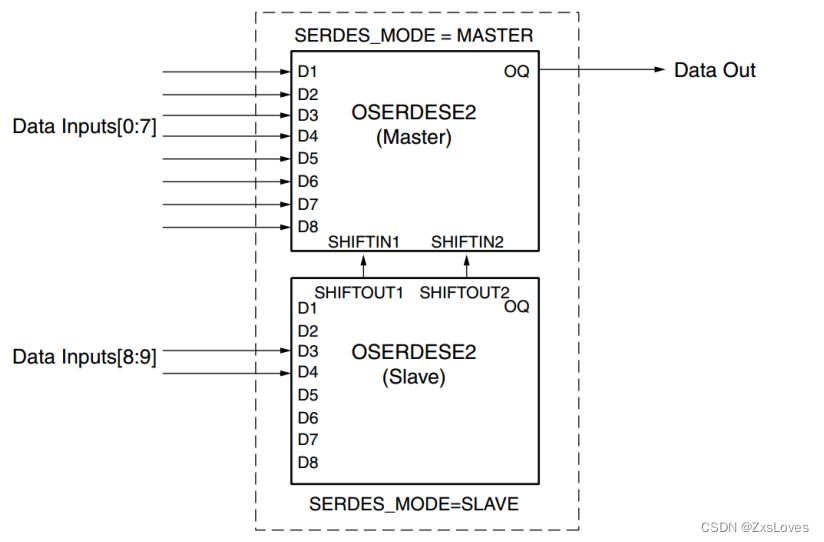
SERDESE2 位宽扩展通过两个 OSERDESE2 模块来实现,其中一个作为 Master,另一个作为 Slave,通过这种方式最多可实现 14:1 的并串转换。需要注意的是,在位宽扩展时,Slave 模块的数据输入端只能使用D3 至 D8。
接下来我们讲述一下 OSERDESE2 原语的使用
我们观察原语 会发现和我们实际想要的 是有一些出入
因为我们实际上想要的是 单纯的 Master 为什么 会加上一段 slave
因为 在Verilog中实例化OSERDESE2时,通常需要实例化两个OSERDESE2模块,一个作为Master,另一个作为Slave。这是因为OSERDESE2(Output SERializer/DESerializer)是用于将并行数据转换为串行数据或将串行数据转换为并行数据的模块。在某些应用中,例如数据传输和通信,需要同时使用Master和Slave。
- Master和Slave的作用
: - Master
- Slave
- 数据传输
: - Master负责将并行数据转换为串行数据进行传输。
- Slave接收串行数据,并将其转换为并行数据。
在一些数据通信协议中,如通用串行接口(Universal Serial Interface,USI),或者在某些特定的通信标准中,需要同时使用Master和Slave来实现数据的并行与串行转换,这样可以满足双向数据传输的要求。
因此,在Verilog中实例化OSERDESE2的Master和Slave是为了支持这种双向数据传输和转换的需求。两者协同工作,使得在FPGA中可以实现并行和串行数据之间的转换和传输。
然后我们 观察源码 会发现其实也并未用到 slave的 其实 但是写进了代码里面
代码里slave 部分 的输出配置的是 0 就相当于没有用到
因此 下面 就是 我们这个实验总的代码 如下 显示
asyn_rst_syn
module asyn_rst_syn(
input clk, //目的时钟域
input reset_n, //异步复位,低有效
output syn_reset //高有效
);
//reg define
reg reset_1;
reg reset_2;
//*****************************************************
//** main code
//*****************************************************
assign syn_reset = reset_2;
//对异步复位信号进行同步释放,并转换成高有效
always @ (posedge clk or negedge reset_n) begin
if(!reset_n) begin
reset_1 <= 1'b1;
reset_2 <= 1'b1;
end
else begin
reset_1 <= 1'b0;
reset_2 <= reset_1;
end
end
endmodule
dvi_encoder
module dvi_encoder (
input clkin, // pixel clock input
input rstin, // async. reset input (active high)
input [7:0] din, // data inputs: expect registered
input c0, // c0 input
input c1, // c1 input
input de, // de input
output reg [9:0] dout // data outputs
);
// Counting number of 1s and 0s for each incoming pixel
// component. Pipe line the result.
// Register Data Input so it matches the pipe lined adder
// output
reg [3:0] n1d; //number of 1s in din
reg [7:0] din_q;
//计算像素数据中“1”的个数
always @ (posedge clkin) begin
n1d <=#1 din[0] + din[1] + din[2] + din[3] + din[4] + din[5] + din[6] + din[7];
din_q <=#1 din;
end
///
// Stage 1: 8 bit -> 9 bit
// Refer to DVI 1.0 Specification, page 29, Figure 3-5
///
wire decision1;
assign decision1 = (n1d > 4'h4) | ((n1d == 4'h4) & (din_q[0] == 1'b0));
wire [8:0] q_m;
assign q_m[0] = din_q[0];
assign q_m[1] = (decision1) ? (q_m[0] ^~ din_q[1]) : (q_m[0] ^ din_q[1]);
assign q_m[2] = (decision1) ? (q_m[1] ^~ din_q[2]) : (q_m[1] ^ din_q[2]);
assign q_m[3] = (decision1) ? (q_m[2] ^~ din_q[3]) : (q_m[2] ^ din_q[3]);
assign q_m[4] = (decision1) ? (q_m[3] ^~ din_q[4]) : (q_m[3] ^ din_q[4]);
assign q_m[5] = (decision1) ? (q_m[4] ^~ din_q[5]) : (q_m[4] ^ din_q[5]);
assign q_m[6] = (decision1) ? (q_m[5] ^~ din_q[6]) : (q_m[5] ^ din_q[6]);
assign q_m[7] = (decision1) ? (q_m[6] ^~ din_q[7]) : (q_m[6] ^ din_q[7]);
assign q_m[8] = (decision1) ? 1'b0 : 1'b1;
/
// Stage 2: 9 bit -> 10 bit
// Refer to DVI 1.0 Specification, page 29, Figure 3-5
/
reg [3:0] n1q_m, n0q_m; // number of 1s and 0s for q_m
always @ (posedge clkin) begin
n1q_m <=#1 q_m[0] + q_m[1] + q_m[2] + q_m[3] + q_m[4] + q_m[5] + q_m[6] + q_m[7];
n0q_m <=#1 4'h8 - (q_m[0] + q_m[1] + q_m[2] + q_m[3] + q_m[4] + q_m[5] + q_m[6] + q_m[7]);
end
parameter CTRLTOKEN0 = 10'b1101010100;
parameter CTRLTOKEN1 = 10'b0010101011;
parameter CTRLTOKEN2 = 10'b0101010100;
parameter CTRLTOKEN3 = 10'b1010101011;
reg [4:0] cnt; //disparity counter, MSB is the sign bit
wire decision2, decision3;
assign decision2 = (cnt == 5'h0) | (n1q_m == n0q_m);
/
// [(cnt > 0) and (N1q_m > N0q_m)] or [(cnt < 0) and (N0q_m > N1q_m)]
/
assign decision3 = (~cnt[4] & (n1q_m > n0q_m)) | (cnt[4] & (n0q_m > n1q_m));
// pipe line alignment
reg de_q, de_reg;
reg c0_q, c1_q;
reg c0_reg, c1_reg;
reg [8:0] q_m_reg;
always @ (posedge clkin) begin
de_q <=#1 de;
de_reg <=#1 de_q;
c0_q <=#1 c0;
c0_reg <=#1 c0_q;
c1_q <=#1 c1;
c1_reg <=#1 c1_q;
q_m_reg <=#1 q_m;
end
///
// 10-bit out
// disparity counter
///
always @ (posedge clkin or posedge rstin) begin
if(rstin) begin
dout <= 10'h0;
cnt <= 5'h0;
end else begin
if (de_reg) begin
if(decision2) begin
dout[9] <=#1 ~q_m_reg[8];
dout[8] <=#1 q_m_reg[8];
dout[7:0] <=#1 (q_m_reg[8]) ? q_m_reg[7:0] : ~q_m_reg[7:0];
cnt <=#1 (~q_m_reg[8]) ? (cnt + n0q_m - n1q_m) : (cnt + n1q_m - n0q_m);
end else begin
if(decision3) begin
dout[9] <=#1 1'b1;
dout[8] <=#1 q_m_reg[8];
dout[7:0] <=#1 ~q_m_reg[7:0];
cnt <=#1 cnt + {q_m_reg[8], 1'b0} + (n0q_m - n1q_m);
end else begin
dout[9] <=#1 1'b0;
dout[8] <=#1 q_m_reg[8];
dout[7:0] <=#1 q_m_reg[7:0];
cnt <=#1 cnt - {~q_m_reg[8], 1'b0} + (n1q_m - n0q_m);
end
end
end else begin
case ({c1_reg, c0_reg})
2'b00: dout <=#1 CTRLTOKEN0;
2'b01: dout <=#1 CTRLTOKEN1;
2'b10: dout <=#1 CTRLTOKEN2;
default: dout <=#1 CTRLTOKEN3;
endcase
cnt <=#1 5'h0;
end
end
end
endmodule
dvi_transmitter_top
module dvi_transmitter_top(
input pclk, // pixel clock
input pclk_x5, // pixel clock x5
input reset_n, // reset
input [23:0] video_din, // RGB888 video in
input video_hsync, // hsync data
input video_vsync, // vsync data
input video_de, // data enable
output tmds_clk_p, // TMDS 时钟通道
output tmds_clk_n,
output [2:0] tmds_data_p, // TMDS 数据通道
output [2:0] tmds_data_n,
output tmds_oen // TMDS 输出使能
);
//wire define
wire reset;
//并行数据
wire [9:0] red_10bit;
wire [9:0] green_10bit;
wire [9:0] blue_10bit;
wire [9:0] clk_10bit;
//串行数据
wire [2:0] tmds_data_serial;
wire tmds_clk_serial;
//*****************************************************
//** main code
//*****************************************************
assign tmds_oen = 1'b1;
assign clk_10bit = 10'b1111100000;
//异步复位,同步释放
asyn_rst_syn reset_syn(
.reset_n (reset_n),
.clk (pclk),
.syn_reset (reset) //高有效
);
//对三个颜色通道进行编码
dvi_encoder encoder_b (
.clkin (pclk),
.rstin (reset),
.din (video_din[7:0]),
.c0 (video_hsync),
.c1 (video_vsync),
.de (video_de),
.dout (blue_10bit)
) ;
dvi_encoder encoder_g (
.clkin (pclk),
.rstin (reset),
.din (video_din[15:8]),
.c0 (1'b0),
.c1 (1'b0),
.de (video_de),
.dout (green_10bit)
) ;
dvi_encoder encoder_r (
.clkin (pclk),
.rstin (reset),
.din (video_din[23:16]),
.c0 (1'b0),
.c1 (1'b0),
.de (video_de),
.dout (red_10bit)
) ;
//对编码后的数据进行并串转换
serializer_10_to_1 serializer_b(
.reset (reset), // 复位,高有效
.paralell_clk (pclk), // 输入并行数据时钟
.serial_clk_5x (pclk_x5), // 输入串行数据时钟
.paralell_data (blue_10bit), // 输入并行数据
.serial_data_out (tmds_data_serial[0]) // 输出串行数据
);
serializer_10_to_1 serializer_g(
.reset (reset),
.paralell_clk (pclk),
.serial_clk_5x (pclk_x5),
.paralell_data (green_10bit),
.serial_data_out (tmds_data_serial[1])
);
serializer_10_to_1 serializer_r(
.reset (reset),
.paralell_clk (pclk),
.serial_clk_5x (pclk_x5),
.paralell_data (red_10bit),
.serial_data_out (tmds_data_serial[2])
);
serializer_10_to_1 serializer_clk(
.reset (reset),
.paralell_clk (pclk),
.serial_clk_5x (pclk_x5),
.paralell_data (clk_10bit),
.serial_data_out (tmds_clk_serial)
);
//转换差分信号
OBUFDS #(
.IOSTANDARD ("TMDS_33") // I/O电平标准为TMDS
) TMDS0 (
.I (tmds_data_serial[0]),
.O (tmds_data_p[0]),
.OB (tmds_data_n[0])
);
OBUFDS #(
.IOSTANDARD ("TMDS_33") // I/O电平标准为TMDS
) TMDS1 (
.I (tmds_data_serial[1]),
.O (tmds_data_p[1]),
.OB (tmds_data_n[1])
);
OBUFDS #(
.IOSTANDARD ("TMDS_33") // I/O电平标准为TMDS
) TMDS2 (
.I (tmds_data_serial[2]),
.O (tmds_data_p[2]),
.OB (tmds_data_n[2])
);
OBUFDS #(
.IOSTANDARD ("TMDS_33") // I/O电平标准为TMDS
) TMDS3 (
.I (tmds_clk_serial),
.O (tmds_clk_p),
.OB (tmds_clk_n)
);
endmodule
hdmi_colorbar_top
module hdmi_colorbar_top(
input sys_clk,
input sys_rst_n,
output tmds_clk_p, // TMDS 时钟通道
output tmds_clk_n,
output [2:0] tmds_data_p, // TMDS 数据通道
output [2:0] tmds_data_n
);
//wire define
wire pixel_clk;
wire pixel_clk_5x;
wire clk_locked;
wire [10:0] pixel_xpos_w;
wire [10:0] pixel_ypos_w;
wire [23:0] pixel_data_w;
wire video_hs;
wire video_vs;
wire video_de;
wire [23:0] video_rgb;
//*****************************************************
//** main code
//*****************************************************
//例化MMCM/PLL IP核
clk_wiz_0 clk_wiz_0(
.clk_in1 (sys_clk),
.clk_out1 (pixel_clk), //像素时钟
.clk_out2 (pixel_clk_5x), //5倍像素时钟
.reset (~sys_rst_n),
.locked (clk_locked)
);
//例化视频显示驱动模块
video_driver u_video_driver(
.pixel_clk (pixel_clk),
.sys_rst_n (sys_rst_n),
.video_hs (video_hs),
.video_vs (video_vs),
.video_de (video_de),
.video_rgb (video_rgb),
.pixel_xpos (pixel_xpos_w),
.pixel_ypos (pixel_ypos_w),
.pixel_data (pixel_data_w)
);
//例化视频显示模块
video_display u_video_display(
.pixel_clk (pixel_clk),
.sys_rst_n (sys_rst_n),
.pixel_xpos (pixel_xpos_w),
.pixel_ypos (pixel_ypos_w),
.pixel_data (pixel_data_w)
);
//例化HDMI驱动模块
dvi_transmitter_top u_rgb2dvi_0(
.pclk (pixel_clk),
.pclk_x5 (pixel_clk_5x),
.reset_n (sys_rst_n & clk_locked),
.video_din (video_rgb),
.video_hsync (video_hs),
.video_vsync (video_vs),
.video_de (video_de),
.tmds_clk_p (tmds_clk_p),
.tmds_clk_n (tmds_clk_n),
.tmds_data_p (tmds_data_p),
.tmds_data_n (tmds_data_n),
.tmds_oen () //预留的端口,本次实验未用到
);
endmodule
serializer_10_to_1
module serializer_10_to_1(
input reset, // 复位,高有效
input paralell_clk, // 输入并行数据时钟
input serial_clk_5x, // 输入串行数据时钟
input [9:0] paralell_data, // 输入并行数据
output serial_data_out // 输出串行数据
);
//wire define
wire cascade1; //用于两个OSERDESE2级联的信号
wire cascade2;
//*****************************************************
//** main code
//*****************************************************
//例化OSERDESE2原语,实现并串转换,Master模式
OSERDESE2 #(
.DATA_RATE_OQ ("DDR"), // 设置双倍数据速率
.DATA_RATE_TQ ("SDR"), // DDR, BUF, SDR
.DATA_WIDTH (10), // 输入的并行数据宽度为10bit
.SERDES_MODE ("MASTER"), // 设置为Master,用于10bit宽度扩展
.TBYTE_CTL ("FALSE"), // Enable tristate byte operation (FALSE, TRUE)
.TBYTE_SRC ("FALSE"), // Tristate byte source (FALSE, TRUE)
.TRISTATE_WIDTH (1) // 3-state converter width (1,4)
)
OSERDESE2_Master (
.CLK (serial_clk_5x), // 串行数据时钟,5倍时钟频率
.CLKDIV (paralell_clk), // 并行数据时钟
.RST (reset), // 1-bit input: Reset
.OCE (1'b1), // 1-bit input: Output data clock enable
.OQ (serial_data_out), // 串行输出数据
.D1 (paralell_data[0]), // D1 - D8: 并行数据输入
.D2 (paralell_data[1]),
.D3 (paralell_data[2]),
.D4 (paralell_data[3]),
.D5 (paralell_data[4]),
.D6 (paralell_data[5]),
.D7 (paralell_data[6]),
.D8 (paralell_data[7]),
.SHIFTIN1 (cascade1), // SHIFTIN1 用于位宽扩展
.SHIFTIN2 (cascade2), // SHIFTIN2
.SHIFTOUT1 (), // SHIFTOUT1: 用于位宽扩展
.SHIFTOUT2 (), // SHIFTOUT2
.OFB (), // 以下是未使用信号
.T1 (1'b0),
.T2 (1'b0),
.T3 (1'b0),
.T4 (1'b0),
.TBYTEIN (1'b0),
.TCE (1'b0),
.TBYTEOUT (),
.TFB (),
.TQ ()
);
//例化OSERDESE2原语,实现并串转换,Slave模式
OSERDESE2 #(
.DATA_RATE_OQ ("DDR"), // 设置双倍数据速率
.DATA_RATE_TQ ("SDR"), // DDR, BUF, SDR
.DATA_WIDTH (10), // 输入的并行数据宽度为10bit
.SERDES_MODE ("SLAVE"), // 设置为Slave,用于10bit宽度扩展
.TBYTE_CTL ("FALSE"), // Enable tristate byte operation (FALSE, TRUE)
.TBYTE_SRC ("FALSE"), // Tristate byte source (FALSE, TRUE)
.TRISTATE_WIDTH (1) // 3-state converter width (1,4)
)
OSERDESE2_Slave (
.CLK (serial_clk_5x), // 串行数据时钟,5倍时钟频率
.CLKDIV (paralell_clk), // 并行数据时钟
.RST (reset), // 1-bit input: Reset
.OCE (1'b1), // 1-bit input: Output data clock enable
.OQ (), // 串行输出数据
.D1 (1'b0), // D1 - D8: 并行数据输入
.D2 (1'b0),
.D3 (paralell_data[8]),
.D4 (paralell_data[9]),
.D5 (1'b0),
.D6 (1'b0),
.D7 (1'b0),
.D8 (1'b0),
.SHIFTIN1 (), // SHIFTIN1 用于位宽扩展
.SHIFTIN2 (), // SHIFTIN2
.SHIFTOUT1 (cascade1), // SHIFTOUT1: 用于位宽扩展
.SHIFTOUT2 (cascade2), // SHIFTOUT2
.OFB (), // 以下是未使用信号
.T1 (1'b0),
.T2 (1'b0),
.T3 (1'b0),
.T4 (1'b0),
.TBYTEIN (1'b0),
.TCE (1'b0),
.TBYTEOUT (),
.TFB (),
.TQ ()
);
endmodule
video_display
module video_display(
input pixel_clk,
input sys_rst_n,
input [10:0] pixel_xpos, //像素点横坐标
input [10:0] pixel_ypos, //像素点纵坐标
output reg [23:0] pixel_data //像素点数据
);
//parameter define
parameter H_DISP = 11'd1280; //分辨率——行
parameter V_DISP = 11'd720; //分辨率——列
localparam WHITE = 24'b11111111_11111111_11111111; //RGB888 白色
localparam BLACK = 24'b00000000_00000000_00000000; //RGB888 黑色
localparam RED = 24'b11111111_00001100_00000000; //RGB888 红色
localparam GREEN = 24'b00000000_11111111_00000000; //RGB888 绿色
localparam BLUE = 24'b00000000_00000000_11111111; //RGB888 蓝色
//*****************************************************
//** main code
//*****************************************************
//根据当前像素点坐标指定当前像素点颜色数据,在屏幕上显示彩条
always @(posedge pixel_clk ) begin
if (!sys_rst_n)
pixel_data <= 16'd0;
else begin
if((pixel_xpos >= 0) && (pixel_xpos < (H_DISP/5)*1))
pixel_data <= WHITE;
else if((pixel_xpos >= (H_DISP/5)*1) && (pixel_xpos < (H_DISP/5)*2))
pixel_data <= BLACK;
else if((pixel_xpos >= (H_DISP/5)*2) && (pixel_xpos < (H_DISP/5)*3))
pixel_data <= RED;
else if((pixel_xpos >= (H_DISP/5)*3) && (pixel_xpos < (H_DISP/5)*4))
pixel_data <= GREEN;
else
pixel_data <= BLUE;
end
end
endmodule
video_driver
module video_driver(
input pixel_clk,
input sys_rst_n,
//RGB接口
output video_hs, //行同步信号
output video_vs, //场同步信号
output video_de, //数据使能
output [23:0] video_rgb, //RGB888颜色数据
input [23:0] pixel_data, //像素点数据
output [10:0] pixel_xpos, //像素点横坐标
output [10:0] pixel_ypos //像素点纵坐标
);
//parameter define
//1280*720 分辨率时序参数
parameter H_SYNC = 11'd40; //行同步
parameter H_BACK = 11'd220; //行显示后沿
parameter H_DISP = 11'd1280; //行有效数据
parameter H_FRONT = 11'd110; //行显示前沿
parameter H_TOTAL = 11'd1650; //行扫描周期
parameter V_SYNC = 11'd5; //场同步
parameter V_BACK = 11'd20; //场显示后沿
parameter V_DISP = 11'd720; //场有效数据
parameter V_FRONT = 11'd5; //场显示前沿
parameter V_TOTAL = 11'd750; //场扫描周期
//reg define
reg [10:0] cnt_h;
reg [10:0] cnt_v;
//wire define
wire video_en;
wire data_req;
//*****************************************************
//** main code
//*****************************************************
assign video_de = video_en;
assign video_hs = ( cnt_h < H_SYNC ) ? 1'b0 : 1'b1; //行同步信号赋值
assign video_vs = ( cnt_v < V_SYNC ) ? 1'b0 : 1'b1; //场同步信号赋值
//使能RGB数据输出
assign video_en = (((cnt_h >= H_SYNC+H_BACK) && (cnt_h < H_SYNC+H_BACK+H_DISP))
&&((cnt_v >= V_SYNC+V_BACK) && (cnt_v < V_SYNC+V_BACK+V_DISP)))
? 1'b1 : 1'b0;
//RGB888数据输出
assign video_rgb = video_en ? pixel_data : 24'd0;
//请求像素点颜色数据输入
assign data_req = (((cnt_h >= H_SYNC+H_BACK-1'b1) &&
(cnt_h < H_SYNC+H_BACK+H_DISP-1'b1))
&& ((cnt_v >= V_SYNC+V_BACK) && (cnt_v < V_SYNC+V_BACK+V_DISP)))
? 1'b1 : 1'b0;
//像素点坐标
assign pixel_xpos = data_req ? (cnt_h - (H_SYNC + H_BACK - 1'b1)) : 11'd0;
assign pixel_ypos = data_req ? (cnt_v - (V_SYNC + V_BACK - 1'b1)) : 11'd0;
//行计数器对像素时钟计数
always @(posedge pixel_clk ) begin
if (!sys_rst_n)
cnt_h <= 11'd0;
else begin
if(cnt_h < H_TOTAL - 1'b1)
cnt_h <= cnt_h + 1'b1;
else
cnt_h <= 11'd0;
end
end
//场计数器对行计数
always @(posedge pixel_clk ) begin
if (!sys_rst_n)
cnt_v <= 11'd0;
else if(cnt_h == H_TOTAL - 1'b1) begin
if(cnt_v < V_TOTAL - 1'b1)
cnt_v <= cnt_v + 1'b1;
else
cnt_v <= 11'd0;
end
end
endmodule
下面附上这个实验结果