这两天会持续更新一下Python处理点云数据的教程,大家可以点个关注。今天给大家分享一下点云的经典算法:CSF布料模拟算法。
1 CSF算法简介
CSF算法,全称为Cloth Simulation Filtering,是一种基于欧几里得空间中最小生成树思想的聚类算法,它可以很好地对点云数据进行分割和分类。这个算法的核心思想是把点云数据转化成一张图,然后通过逐步连接最近邻点构建出多棵生成树,再将所有生成树合并成一张图,并利用深度优先搜索、双向广搜等手段对其上点进行分割。这样就可以将点云数据快速分割成多个类别,并且获取到每个点所属的类别。
在CSF算法的基础上,可以使用其地面点滤波方法。具体方法是通过使用RANSAC算法估计地面模型的法向量,然后通过计算每个点到地面模型的距离来滤除非地面点,而最后剩下的点即为地面点。同时,需要在此基础上做一些修改来提高算法的效率:首先,将待处理的点云数据进行降采样,减少计算量;其次,使用KD树快速搜索每个点的最近邻点,加速点云数据的处理过程。
此外,CSF算法也可以结合其他技术进行优化,例如在数据预处理阶段使用数据降维技术,减少数据量;在生成树构建阶段使用多线程并行计算,提高计算效率;在分割阶段使用机器学习算法,提高分割精度等。
总之,CSF算法是一种基于图模型的聚类算法,适用于点云数据的分割和分类任务。通过与其他技术的结合,可以实现更高效、更精确的点云数据处理。
2 代码实现
2.1 项目地址
我这里的CSF算法是直接用了大佬的包,大家可以自行去下载,然后pip install安装即可。项目地址:GitHub - jianboqi/CSF
2.2 代码展示
我这里使用的是laspy库打开的点云文件,所以只支持.las格式的点云。你们也可以换成open3d库,这样就可以实现其他格式点云的CSF算法咯。
# -*- coding: utf-8 -*-
"""
@Time : 2023/11/30 14:11
@Auth : RS迷途小书童
@File :Las Data CSF.py
@IDE :PyCharm
@Purpose:点云数据CSF布料算法
"""
import laspy
import CSF
import numpy as np
import open3d as o3d
def csf_las(file=r"Z:\Personal\彭俊喜\Lidar_try/2.las", outfile=r"Z:\Personal\彭俊喜\Lidar_try/out1.las"):
las = laspy.read(file) # read a las file
points = las.points
xyz = np.vstack((las.x, las.y, las.z)).transpose() # extract x, y, z and put into a list # 点云的空间位置
# ---------------------------CSF参数设置---------------------------
csf = CSF.CSF()
csf.params.bSloopSmooth = False # 粒子设置为不可移动
csf.params.cloth_resolution = 0.1 # 布料网格分辨率2
csf.params.rigidness = 3 # 布料刚性参数2
csf.params.time_step = 0.65 # 步长
csf.params.class_threshold = 0.03 # 点云与布料模拟点的距离阈值0.5
csf.params.interations = 500 # 最大迭代次数500
# more details about parameter: http://ramm.bnu.edu.cn/projects/CSF/download/
csf.setPointCloud(xyz)
ground = CSF.VecInt() # 地面点索引列表
non_ground = CSF.VecInt() # 非地面点索引列表
csf.do_filtering(ground, non_ground) # 执行滤波函数
# ---------------------------laspy库保存----------------------------
out_file = laspy.LasData(las.header)
out_file.points = points[np.array(ground)] # extract ground points, and save it to a las file.
out_file.write(outfile)
# ---------------------------open3d库保存---------------------------
"""
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(a)
pcd1 = o3d.geometry.PointCloud()
pcd1.points = o3d.utility.Vector3dVector(b)
o3d.io.write_point_cloud(r'Z:/彭俊喜/1.pcd', pcd, write_ascii=False, compressed=False, print_progress=True)
o3d.io.write_point_cloud(r'Z:/彭俊喜/2.pcd', pcd1, write_ascii=False, compressed=False, print_progress=True)
"""
return xyz[ground], xyz[non_ground]
# 返回地面点和非地面点的数组
def show_point(np1, np2):
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(np1)
pcd1 = o3d.geometry.PointCloud()
pcd1.points = o3d.utility.Vector3dVector(np2)
# 数组转点云
pcd.paint_uniform_color([0, 1, 0]) # 自定义颜色
pcd1.paint_uniform_color([1, 0, 0]) # 自定义颜色
o3d.visualization.draw_geometries([pcd], window_name='ground')
o3d.visualization.draw_geometries([pcd1], window_name='tree')
# o3d.visualization.draw_geometries([pcd], window_name='Point Cloud View', width=1920, height=1080, left=50, top=50,
# point_show_normal=False, mesh_show_wireframe=False, mesh_show_back_face=False)
if __name__ == "__main__":
gd, non_gd = csf_las()
show_point(gd, non_gd)2.3 效果展示
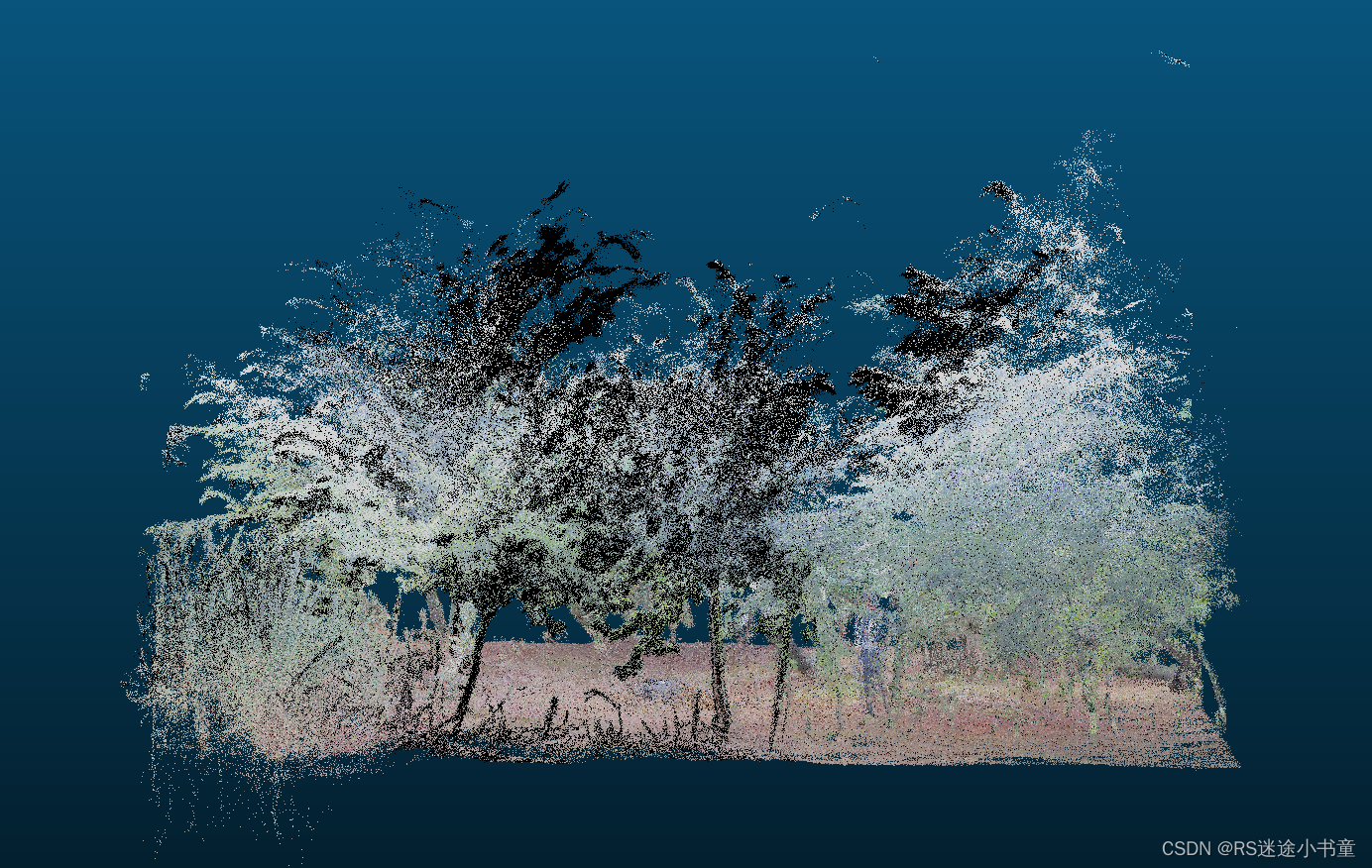
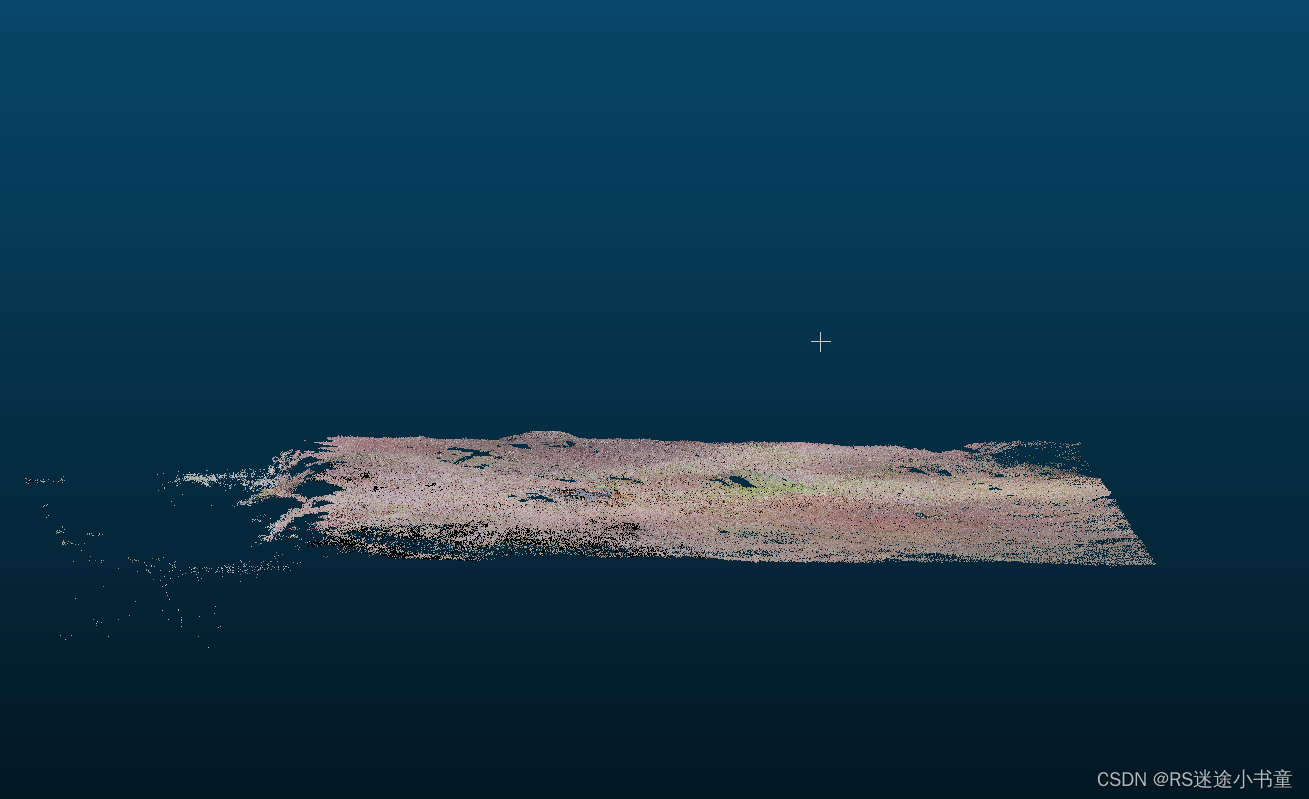
3 总结
目前我就使用了Open3D和Laspy两个库去处理点云数据,个人觉得这两个库还是挺不错的,后面也会持续更新更多的Python处理点云数据的教程,如点云聚类、单木分割等。如果感兴趣可以关注我,目前没有设为收费专栏的想法,大家可以放心学习。



![[wp]“古剑山”第一届全国大学生网络攻防大赛 Web部分wp](https://img-blog.csdnimg.cn/direct/d2ab34b3fe9040688439f2b8722d6d0b.png)