(一)rtthread主线程启动流程
- 声明
- 1.启动分析
- 2.源码分析
声明
本文主要为个人学习笔记内容总结,有来自网络及其他,如有雷同,请告知。
1.启动分析
基于:rt-thread-v5.0.1
先执行:汇编代码startup_stm32f429xx.s开始运行,主要调用SystemInit和 __main
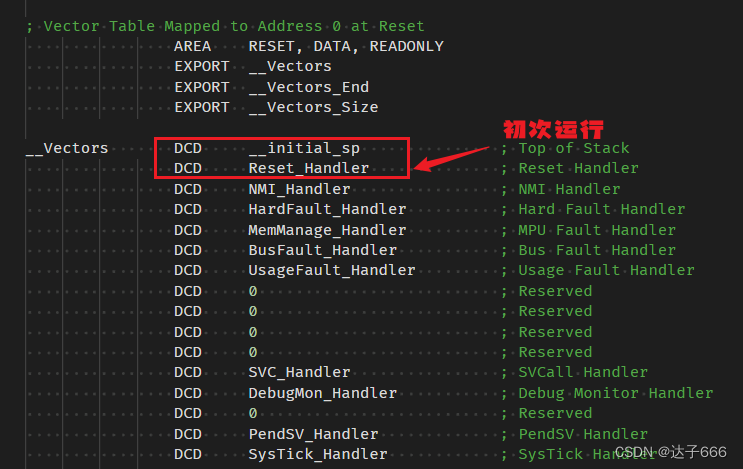
; Reset handler
Reset_Handler PROC
EXPORT Reset_Handler [WEAK]
IMPORT SystemInit
IMPORT __main
LDR R0, =SystemInit
BLX R0
LDR R0, =__main
BX R0
ENDP
2.源码分析
路径:rt-thread-v5.0.1\src\components.c
#ifdef __ARMCC_VERSION
extern int $Super$$main(void);
/* re-define main function */
int $Sub$$main(void)
{
rtthread_startup();
return 0;
}
#elif defined(__ICCARM__)
/* __low_level_init will auto called by IAR cstartup */
extern void __iar_data_init3(void);
int __low_level_init(void)
{
// call IAR table copy function.
__iar_data_init3();
rtthread_startup();
return 0;
}
#elif defined(__GNUC__)
/* Add -eentry to arm-none-eabi-gcc argument */
int entry(void)
{
rtthread_startup();
return 0;
}
#endif
int rtthread_startup(void)
{
rt_hw_interrupt_disable();
/* board level initialization
* NOTE: please initialize heap inside board initialization.
*/
rt_hw_board_init();
/* show RT-Thread version */
rt_show_version();
/* timer system initialization */
rt_system_timer_init();
/* scheduler system initialization */
rt_system_scheduler_init();
#ifdef RT_USING_SIGNALS
/* signal system initialization */
rt_system_signal_init();
#endif /* RT_USING_SIGNALS */
/* create init_thread */
rt_application_init();
/* timer thread initialization */
rt_system_timer_thread_init();
/* idle thread initialization */
rt_thread_idle_init();
#ifdef RT_USING_SMP
rt_hw_spin_lock(&_cpus_lock);
#endif /* RT_USING_SMP */
/* start scheduler */
rt_system_scheduler_start();
/* never reach here */
return 0;
}
路径:rt-thread-v5.0.1\src\components.c
void rt_application_init(void)
{
rt_thread_t tid;
#ifdef RT_USING_HEAP
tid = rt_thread_create("main", main_thread_entry, RT_NULL,
RT_MAIN_THREAD_STACK_SIZE, RT_MAIN_THREAD_PRIORITY, 20);
RT_ASSERT(tid != RT_NULL);
#else
rt_err_t result;
tid = &main_thread;
result = rt_thread_init(tid, "main", main_thread_entry, RT_NULL,
main_thread_stack, sizeof(main_thread_stack), RT_MAIN_THREAD_PRIORITY, 20);
RT_ASSERT(result == RT_EOK);
/* if not define RT_USING_HEAP, using to eliminate the warning */
(void)result;
#endif /* RT_USING_HEAP */
rt_thread_startup(tid);
}
路径:rt-thread-v5.0.1\src\components.c
void main_thread_entry(void *parameter)
{
extern int main(void);
#ifdef RT_USING_COMPONENTS_INIT
/* RT-Thread components initialization */
rt_components_init();
#endif /* RT_USING_COMPONENTS_INIT */
#ifdef RT_USING_SMP
rt_hw_secondary_cpu_up();
#endif /* RT_USING_SMP */
/* invoke system main function */
#ifdef __ARMCC_VERSION
{
extern int $Super$$main(void);
$Super$$main(); /* for ARMCC. */
}
#elif defined(__ICCARM__) || defined(__GNUC__) || defined(__TASKING__) || defined(__TI_COMPILER_VERSION__)
main();
#endif
}
#include <stdio.h>
#include <rtthread.h>
int main(void)
{
return 0;
}