数据寄存器
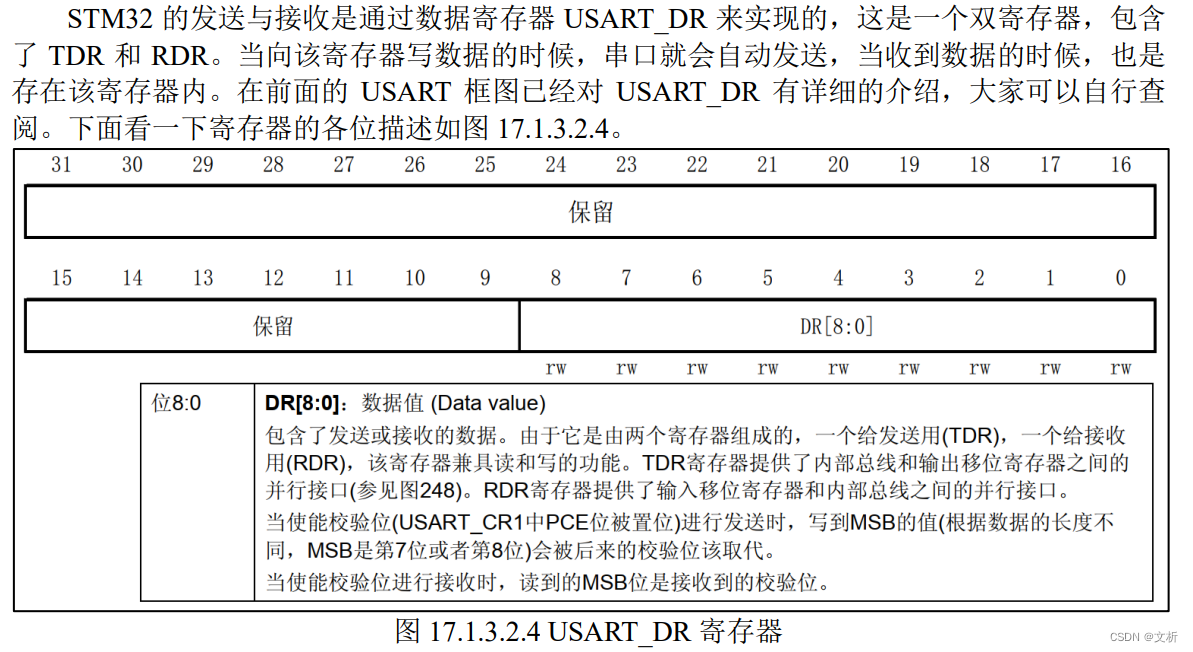
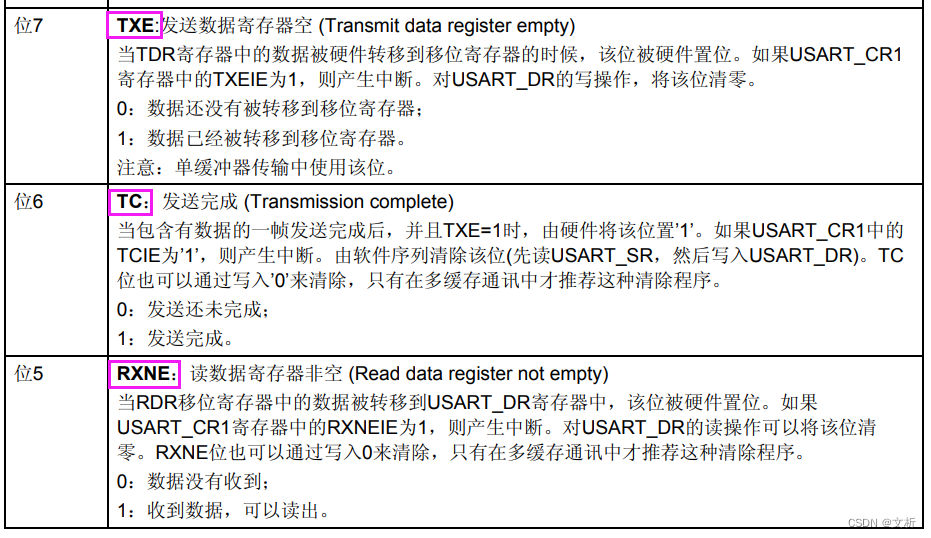
关键的标志位
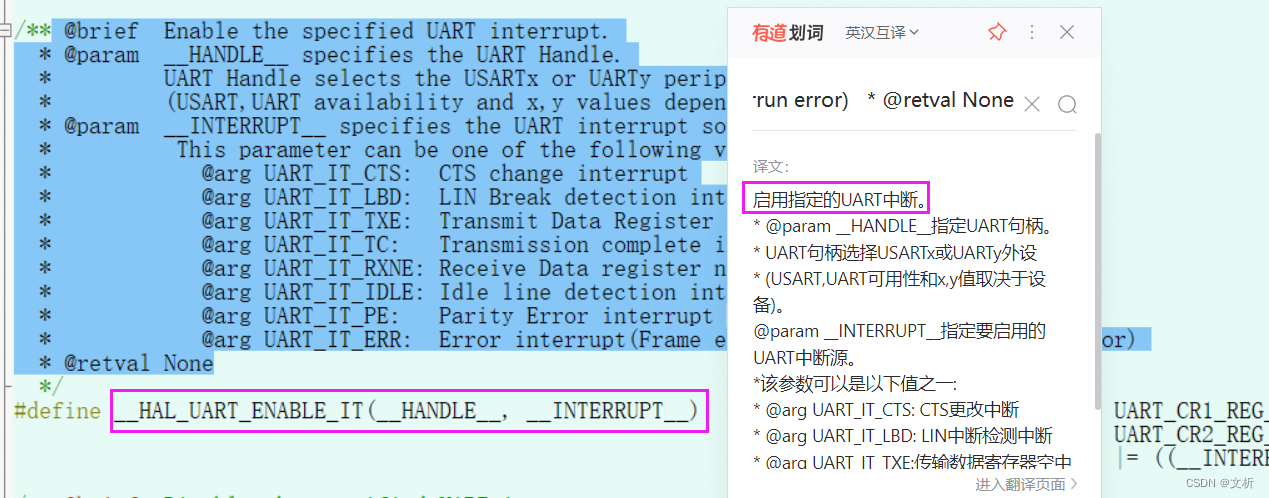
通过该宏定义可以开启对应的串口中断,之前用该宏定义代替标准库函数USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //使能接收中断
HAL库程序
1.串口发送程序
HAL库串口发送一个/一组数据是很简单的,可以直接调用HAL_UART_Transmit(&g_uart1_handle,(uint8_t*)g_usart_rx_buf, len, 1000); /* 发送一个/一组数据*/
第一个参数是对应的串口句柄地址,第二个参数是要发送的数据指针,第三个参数是发送的长度,最后一个参数是设置的超时时间。
2.串口接收程序
串口的接收一般不直接使用对应的库函数HAL_UART_Receive(&uartx_handle,Rxdata,3,1000);,而是自定义通过中断的方式接收一定数量的数据。经过测试hal库接收函数也可以接收相应数量的数据(如下图),但不知道为什么用的不普遍。

2.1 串口接收程序1
#define USART_REC_LEN 200 /* 定义最大接收字节数 200 */
#define USART_EN_RX 1 /* 使能(1)/禁止(0)串口1接收 */
#define RXBUFFERSIZE 1 /* 缓存大小 */
//可以看到 USART_REC_LEN 表示最大接收字节数,这里定义的是 200 个字节,后续如果
//有需求要发送更大的数据包,可以改大这个值,这里不改太大,是避免浪费太多内存。
#if USART_EN_RX /*如果使能了接收*/ //宏定义已经使能了
/* 接收缓冲, 最大USART_REC_LEN个字节. */
uint8_t g_usart_rx_buf[USART_REC_LEN];
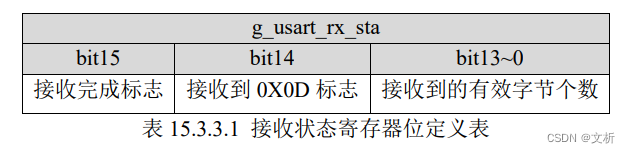
/* 接收状态
* bit15, 接收完成标志
* bit14, 接收到0x0d
* bit13~0, 接收到的有效字节数目
*/
uint16_t g_usart_rx_sta = 0;
uint8_t g_rx_buffer[RXBUFFERSIZE]; /* HAL库使用的串口接收缓冲 */
UART_HandleTypeDef g_uart1_handle; /* UART句柄 */
/**
* @brief 串口X初始化函数
* @param baudrate: 波特率, 根据自己需要设置波特率值
* @note 注意: 必须设置正确的时钟源, 否则串口波特率就会设置异常.
* 这里的USART的时钟源在sys_stm32_clock_init()函数中已经设置过了.
* @retval 无
*/
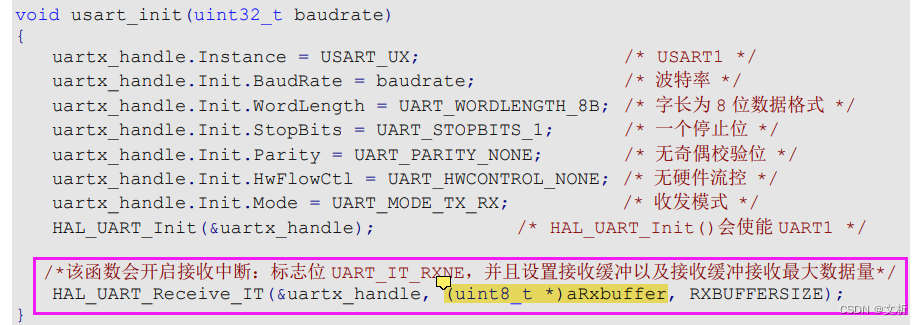
void usart_init(uint32_t baudrate)
{
/*UART 初始化设置*/
g_uart1_handle.Instance = USART_UX; /* USART_UX */
g_uart1_handle.Init.BaudRate = baudrate; /* 波特率 */
g_uart1_handle.Init.WordLength = UART_WORDLENGTH_8B; /* 字长为8位数据格式 */
g_uart1_handle.Init.StopBits = UART_STOPBITS_1; /* 一个停止位 */
g_uart1_handle.Init.Parity = UART_PARITY_NONE; /* 无奇偶校验位 */
g_uart1_handle.Init.HwFlowCtl = UART_HWCONTROL_NONE; /* 无硬件流控 */
g_uart1_handle.Init.Mode = UART_MODE_TX_RX; /* 收发模式 */
HAL_UART_Init(&g_uart1_handle); /* HAL_UART_Init()会使能UART1 */
/* 该函数会开启接收中断:标志位UART_IT_RXNE,并且设置接收缓冲以及接收缓冲接收最大数据量 */
HAL_UART_Receive_IT(&g_uart1_handle, (uint8_t *)g_rx_buffer, RXBUFFERSIZE);
}
/**
* @brief UART底层初始化函数
* @param huart: UART句柄类型指针
* @note 此函数会被HAL_UART_Init()调用
* 完成时钟使能,引脚配置,中断配置
* @retval 无
*/
void HAL_UART_MspInit(UART_HandleTypeDef *huart)
{
GPIO_InitTypeDef gpio_init_struct;
if (huart->Instance == USART_UX) /* 如果是串口1,进行串口1 MSP初始化 */
{
USART_TX_GPIO_CLK_ENABLE(); /* 使能串口TX脚时钟 */
USART_RX_GPIO_CLK_ENABLE(); /* 使能串口RX脚时钟 */
USART_UX_CLK_ENABLE(); /* 使能串口时钟 */
gpio_init_struct.Pin = USART_TX_GPIO_PIN; /* 串口发送引脚号 */
gpio_init_struct.Mode = GPIO_MODE_AF_PP; /* 复用推挽输出 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* IO速度设置为高速 */
HAL_GPIO_Init(USART_TX_GPIO_PORT, &gpio_init_struct);
gpio_init_struct.Pin = USART_RX_GPIO_PIN; /* 串口RX脚 模式设置 */
gpio_init_struct.Mode = GPIO_MODE_AF_INPUT;
HAL_GPIO_Init(USART_RX_GPIO_PORT, &gpio_init_struct); /* 串口RX脚 必须设置成输入模式 */
#if USART_EN_RX //宏定义中已经使能
HAL_NVIC_EnableIRQ(USART_UX_IRQn); /* 使能USART1中断通道 */
HAL_NVIC_SetPriority(USART_UX_IRQn, 3, 3); /* 组2,最低优先级:抢占优先级3,子优先级3 */
#endif
}
}
/**
* @brief 串口数据接收回调函数
数据处理在这里进行
* @param huart:串口句柄
* @retval 无
*/
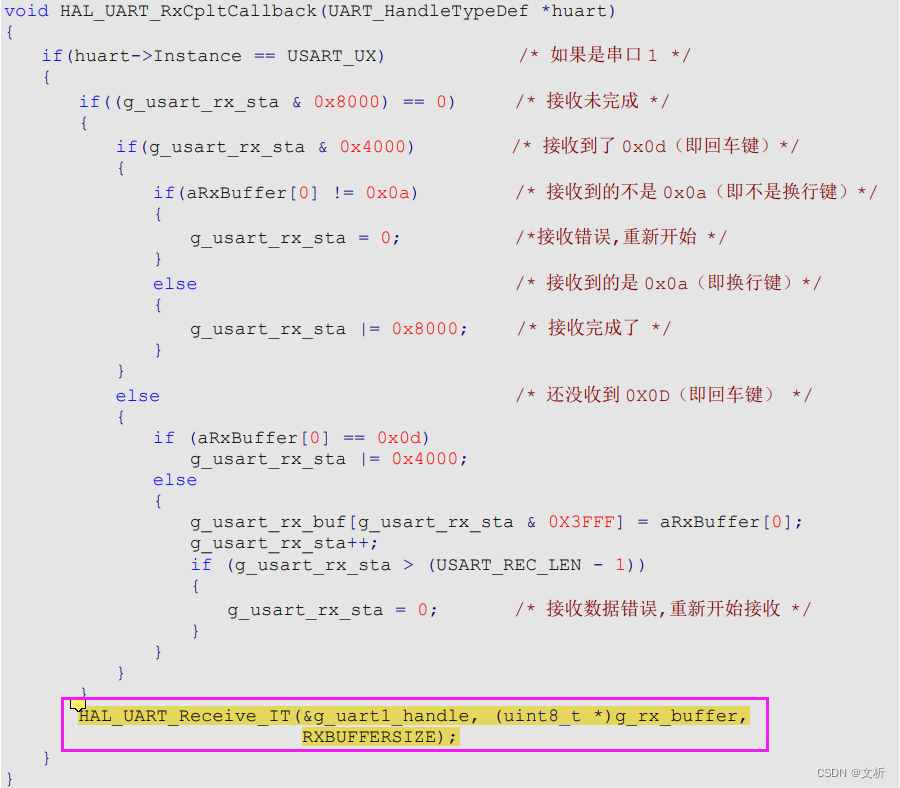
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart->Instance == USART_UX) /* 如果是串口1 */
{
if ((g_usart_rx_sta & 0x8000) == 0) /* 接收未完成 */
{
if (g_usart_rx_sta & 0x4000) /* 接收到了0x0d(即回车键) */
{
if (g_rx_buffer[0] != 0x0a) /* 接收到的不是0x0a(即不是换行键) */
{
g_usart_rx_sta = 0; /* 接收错误,重新开始 */
}
else /* 接收到的是0x0a(即换行键) */
{
g_usart_rx_sta |= 0x8000; /* 接收完成了 */
}
}
else /* 还没收到0X0d(即回车键) */
{
if (g_rx_buffer[0] == 0x0d)
g_usart_rx_sta |= 0x4000;
else
{
g_usart_rx_buf[g_usart_rx_sta & 0X3FFF] = g_rx_buffer[0];
g_usart_rx_sta++;
if (g_usart_rx_sta > (USART_REC_LEN - 1))
{
g_usart_rx_sta = 0; /* 接收数据错误,重新开始接收 */
}
}
}
}
HAL_UART_Receive_IT(&g_uart1_handle, (uint8_t *)g_rx_buffer, RXBUFFERSIZE);
}
}
/**
* @brief 串口1中断服务函数
* @param 无
* @retval 无
*/
void USART_UX_IRQHandler(void)
{
#if SYS_SUPPORT_OS /* 使用OS */
OSIntEnter();
#endif
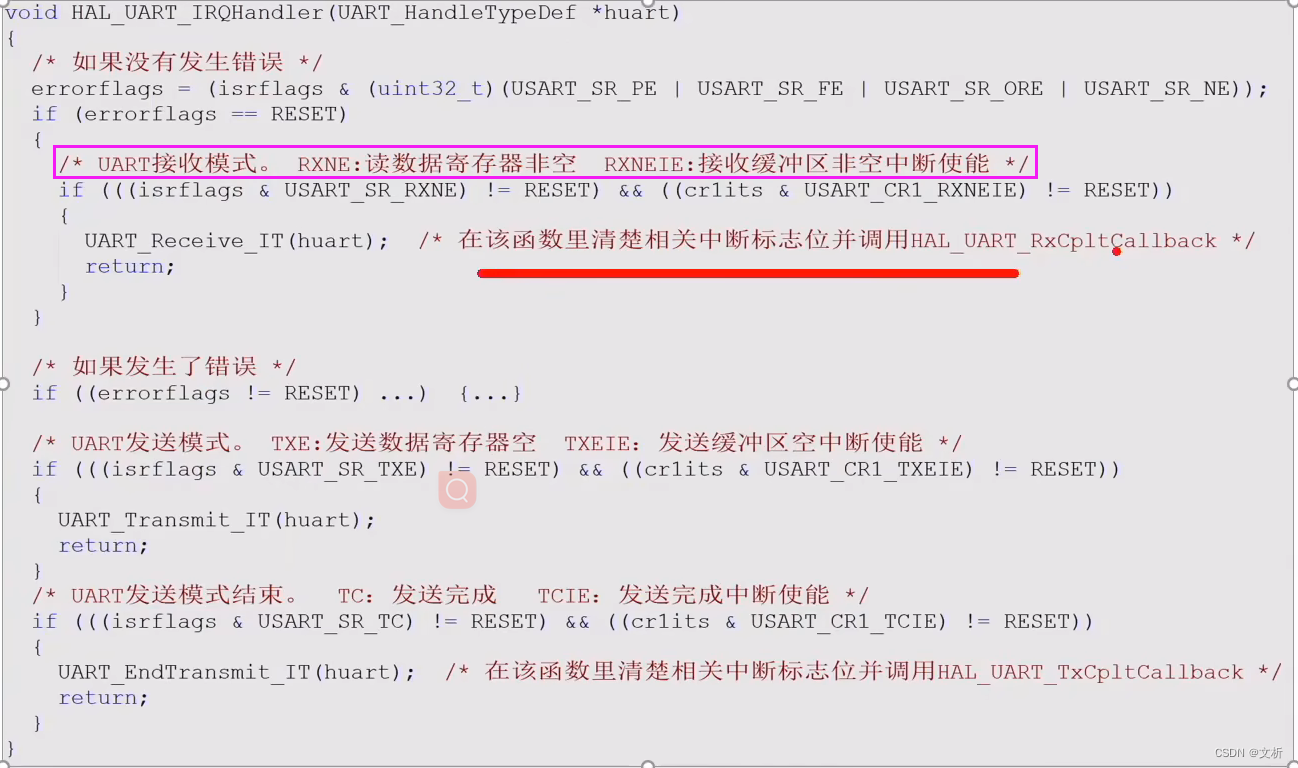
HAL_UART_IRQHandler(&g_uart1_handle); /* 调用HAL库中断处理公用函数 */
#if SYS_SUPPORT_OS /* 使用OS */
OSIntExit();
#endif
}
#endif注意点:
1.发送(TX)引脚模式:因为要输出高低电平,所以要设置为复用推挽输出模式。接收(RX)引脚模式:设置为复用浮空输入模式。
2.串口在初始化开启了接收中断,为什么在接收到一字节后再次开启中断(如下图)?
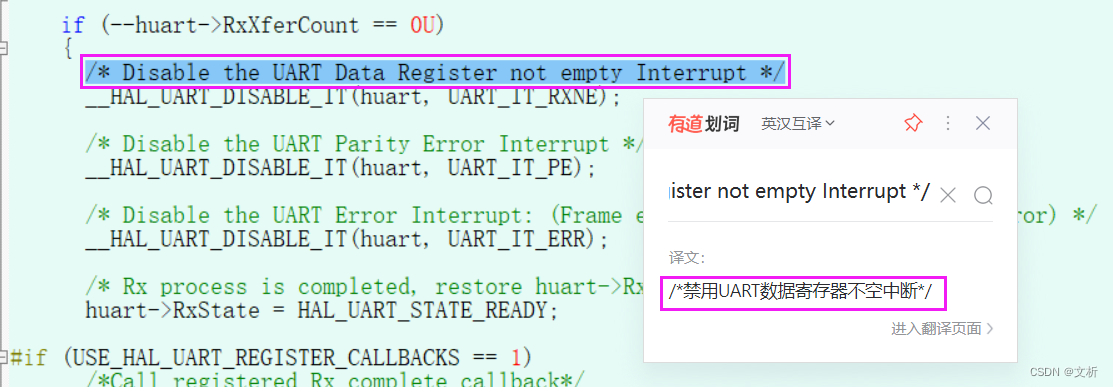
答:因为此程序调用 HAL 库中断处理公用函数HAL_UART_IRQHandler(&g_uart1_handle),在该函数中调用了UART_Receive_IT(huart)函数,该函数的作用就是清除相关中断标志位并调用回调函数且失能数据寄存器非空中断,所以若用中断接收到一个数据后若不开启中断则接收数据后不能产生中断,故每次接收一个数据后都要再次调用HAL_UART_Receive_IT(&g_uart1_handle, (uint8_t *)g_rx_buffer, RXBUFFERSIZE)函数。
在UART_Receive_IT(huart)函数中失能接收中断的具体程序如下:
 3.串口接收多个数据的设计。
3.串口接收多个数据的设计。
因为我们设置了串口句柄成员变量 RxXferSize 为 1,那么每当串口 1 接收到一个字符后触 发接收完成中断,便会在中断服务函数中引导执行该回调函数。当串口接受到一个字符后,它会保存在缓存 g_rx_buffer 中,由于我们设置了缓存大小为 1,而且 RxXferSize=1,所以每次接受一个字符,会直接保存到 RxXferSize[0]中,我们直接通过读取RxXferSize[0]的值就是本次接收到的字符。这里我们设计了一个小小的接收协议:通过这个函数,配合一个数组 g_usart_rx_buf, 一个接收状态寄存器 g_usart_rx_sta(此寄存器其实就是一个全局变量,由作者自行添加。由于 它起到类似寄存器的功能,这里暂且称之为寄存器)实现对串口数据的接收管理。数组 g_usart_rx_buf 的大小由 USART_REC_LEN 定义,也就是一次接收的数据最大不能超过 USART_REC_LEN 个字节。g_usart_rx_sta 是一个接收状态寄存器其各的定义如下表所示:
设计思路如下: 当接收到从电脑发过来的数据,把接收到的数据保存在数组 g_usart_rx_buf 中,同时在接 收状态寄存器(g_usart_rx_sta)中计数接收到的有效数据个数,当收到回车(回车的表示由 2 个 字节组成:0X0D 和 0X0A)的第一个字节 0X0D 时,计数器将不再增加,等待 0X0A 的到来, 而如果 0X0A 没有来到,则认为这次接收失败,重新开始下一次接收。如果顺利接收到 0X0A, 则标记 g_usart_rx_sta 的第 15 位,这样完成一次接收,并等待该位被其他程序清除,从而开始下一次的接收,而如果迟迟没有收到 0X0D,那么在接收数据超过 USART_REC_LEN 的时候, 则会丢弃前面的数据,重新接收。
可以看到,在回调函数后面调用了 UART_Receive_IT 函数。该函数在这里的主要作用是重新开启接收完成中断。