这一篇博客是为了实现温湿度的显示,温湿度传感器将数据穿给单片机,单片机又把数据送给LCD1602和蓝牙,让温度和湿度可以再LCD1602显示屏和手机上显示,它的执行逻辑和C51那里基本一样,就是要修改程序,在程序上有略微的差距。至于LCD1602显示屏和dth11温度传感器怎么用 ,大家可以看看我C51有关的博客,上面对于如何使用说的很详细,http://t.csdnimg.cn/8DY1b
一、硬件介绍
| 名字 | 图片 | 作用 |
| 32单片机 | - | - |
| LCD1602显示屏 | 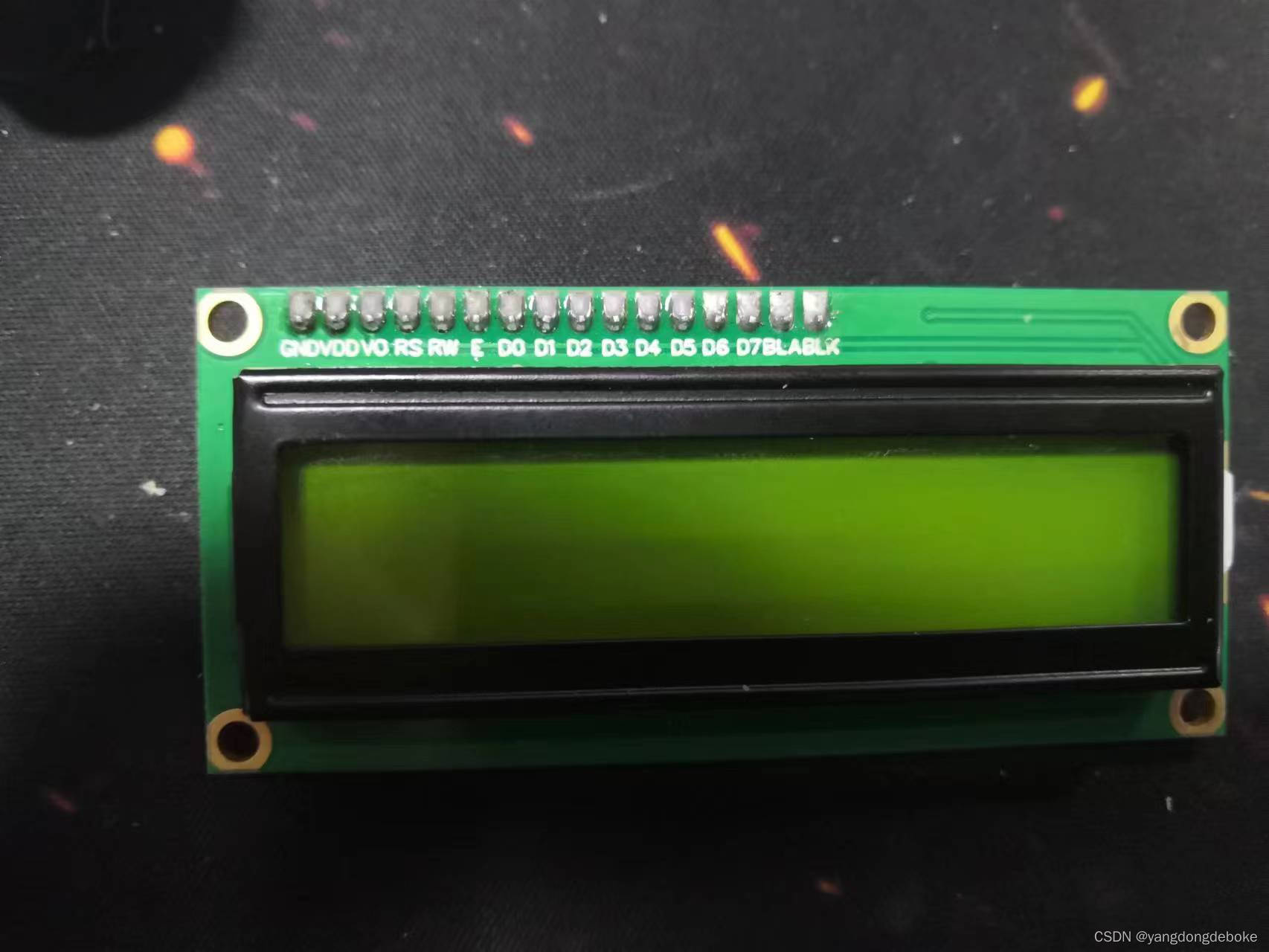 | 显示温湿度,具体的接线如下所示:VSS -- GND VDD -- 5V , VO -- GND ;RS -- B1, RW -- B2, E -- 10; BLA -- 5V, BLK -- GDN ; D0到D7 -- A0.到A7 |
| 蓝牙模块 | 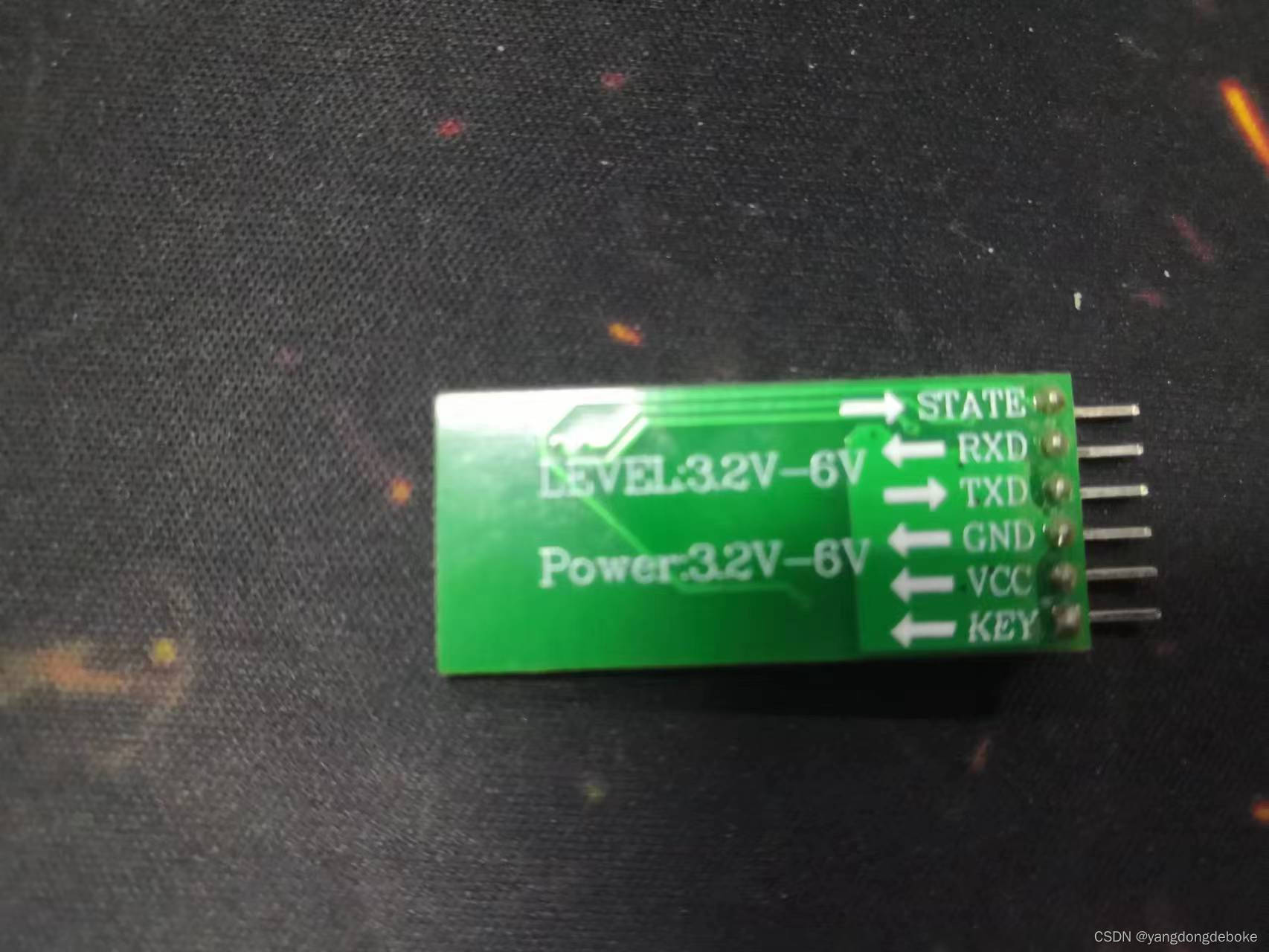 | 与手机蓝牙通信,在手机上显示温湿度,TX接串口1的RX,RX接串口1的TX |
| 温湿度传感器 | 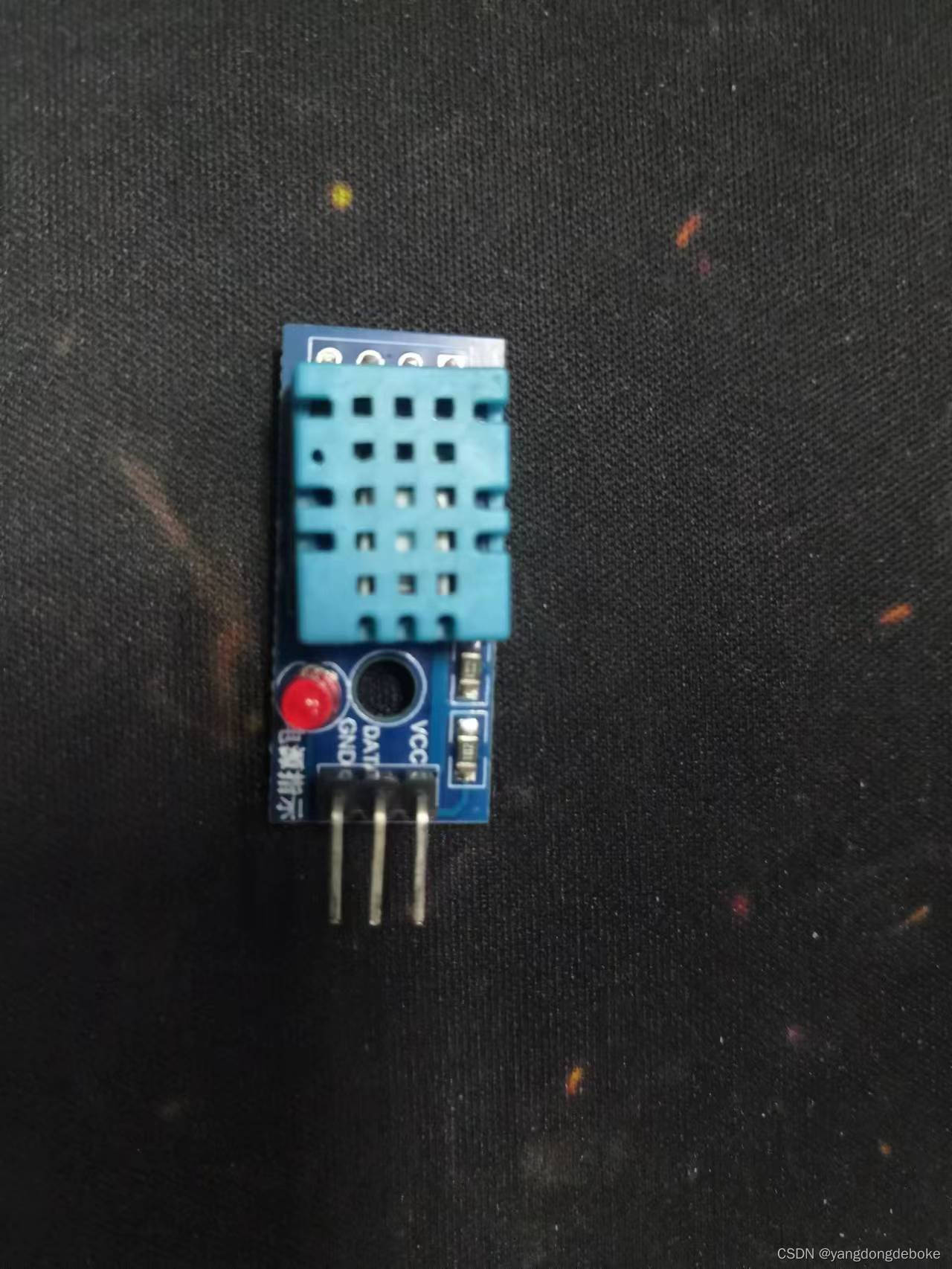 | VCC接3.3V或5V,GND接地,中间的DATE引脚接PB7 |
| 继电器 |  | 干控制电池为电机供电,当温度或者湿度达到临界值后,继电器闭合,干电翅,电机,继电器三者组成的电路通路.继电器的VCC接3.3V |
| 电机 |  | - |
| 2节干电池 | - | 为电机提供电源 |
二、stm32Cube的配置
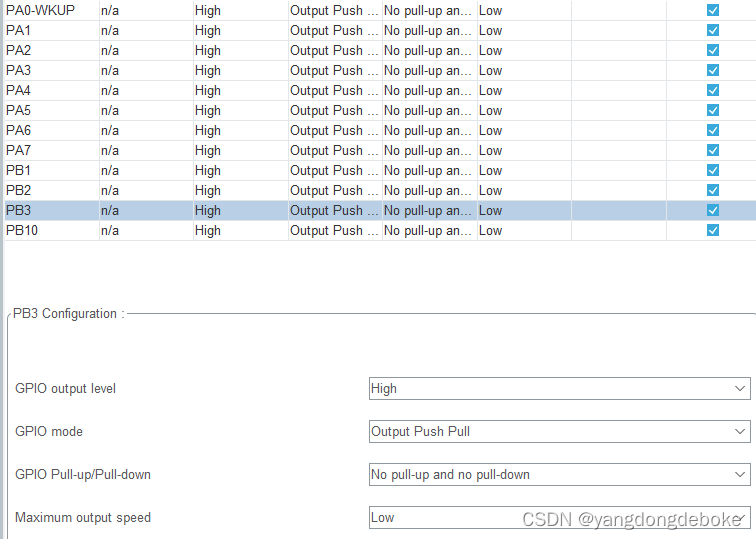
SYS,RCC,照旧,我们要把如下图所示的GPIO口全部配置成推完输出,初始状态为高电平
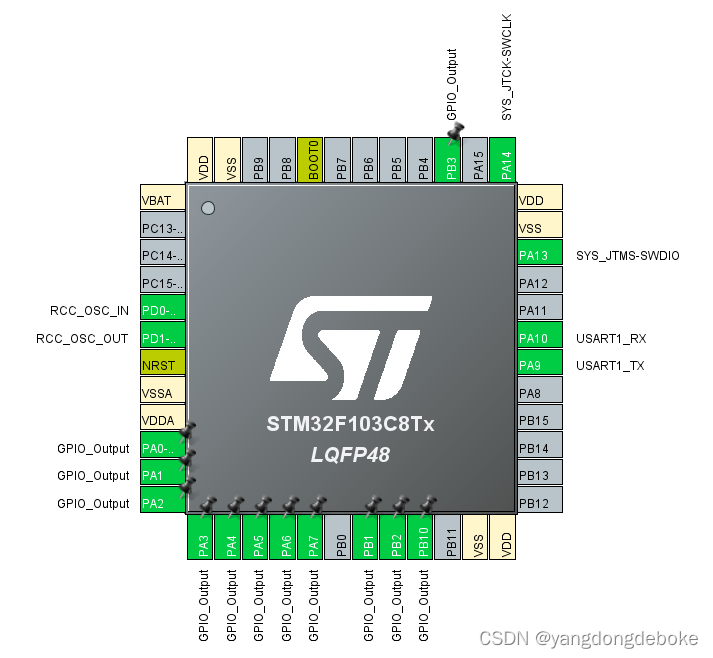
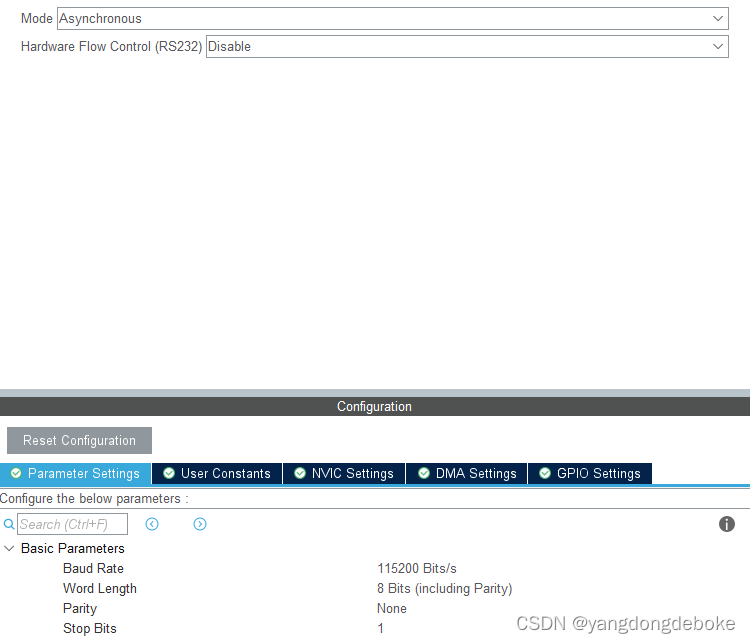
串口使用串口1,对打开对应的中断,如下图所示

三、代码部分
这里要说的是,32单片机的引脚不同于C51,32单片机的引脚的输入和输出状态不能够同时出现。但是在dht11温度传感器里面,温度传感器里面的date引脚与单片机的引脚相连接,该单片机引脚既要输出信号启动温度传感器,又要读入信号,判断传感器是否工作,因此我们没有在stm32Cube里配置该引脚(PB7),而是自己手动配置。
#define DHT_VALUE HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7)
void DHT_GPIO_Init(uint32_t mode)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin : PB8 */
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Mode = mode;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
void DHT11_Start()
{
DHT_GPIO_Init(GPIO_MODE_OUTPUT_PP);//作为输出引脚,启动温度传感器
DHT_HIGH;
DHT_LOW;
HAL_Delay(30);
DHT_HIGH;
DHT_GPIO_Init(GPIO_MODE_INPUT);作为输入引脚,判断温度传感器是否工作
while(DHT_VALUE);
while(!DHT_VALUE);
while(DHT_VALUE);
}
在LCD1602中我们写了输入数据还有输入指令的函数
void Write_Cmd_Func(char cmd)
{
RS_LOW;
RW_LOW;
EN_LOW;
GPIOA->ODR = cmd;
HAL_Delay(5);
EN_HIGH;
HAL_Delay(5);
EN_LOW;
}
void Write_Data_Func(char dataShow)
{
RS_HIGH;
RW_LOW;
EN_LOW;
GPIOA->ODR = dataShow;
HAL_Delay(5);
EN_HIGH;
HAL_Delay(5);
EN_LOW;
}
ODR代表输出数据寄存器, GPIOA->ODR = cmd就是说我们要把cmd这个数据给到输出数据寄存器,这样ODR就会把对应的内容给到LCD1602
在main函数里面
char message[16];
memset(message, 0, sizeof(message));
sprintf(message, "Temp: %d.%d", datas[2], datas[3]);
memset(message, 0, sizeof(message));
sprintf(message, "Humi: %d.%d", datas[0], datas[1]);
sprintf函数可以重映射,把datas[i]里面的数据变成字符串存到 message里,可以让LCD1602输出,但是不能用做串口的输出,串口输出依旧用printf函数,在下面的main.c里有体现
memset函数是清除message里面的内容,防止传输内容出错。
HAL_NVIC_SetPriority(SysTick_IRQn,0,0);
系统滴答定时器的优先级提前,否则当你执行完中断里的命令后,容易死机,最好在main函数里加上
main.c的代码
#include "main.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "string.h"
#include "lcd1602.h"
#include "dht11.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
extern char datas[5];
extern uint8_t buf;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
char message[16];
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
HAL_NVIC_SetPriority(SysTick_IRQn,0,0);
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
printf("hello world\r\n");
LCD1602_INIT();
HAL_UART_Receive_IT(&huart1, &buf, 1);
// Write_Cmd_Func(position);//选择要显示的地址
// Write_Data_Func(dataShow);//发送要显示的字符
// LCD1602_showLine(1,5,"NO.2");
// LCD1602_showLine(2,0,"LX handsome");
HAL_Delay(2000);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
Read_Data_From_DHT();
if(datas[2]>24)
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_3, GPIO_PIN_RESET);
else
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_3, GPIO_PIN_SET);
printf("Temp: %d.%d\r\n", datas[2], datas[3]);
memset(message, 0, sizeof(message));
sprintf(message, "Temp: %d.%d", datas[2], datas[3]);
LCD1602_showLine(1, 0, message);
printf("Humi: %d.%d\r\n", datas[0], datas[1]);
memset(message, 0, sizeof(message));
sprintf(message, "Humi: %d.%d", datas[0], datas[1]);
LCD1602_showLine(2, 0, message);
HAL_Delay(1000);
}usart.c
#include "usart.h"
/* USER CODE BEGIN 0 */
#include "stdio.h"
#include "string.h"
//串口接收缓存(1字节)
uint8_t buf=0;
//定义最大接收字节数 200,可根据需求调整
#define UART1_REC_LEN 200
// 接收缓冲, 串口接收到的数据放在这个数组里,最大UART1_REC_LEN个字节
uint8_t UART1_RX_Buffer[UART1_REC_LEN];
// 接收状态
// bit15, 接收完成标志
// bit14, 接收到0x0d
// bit13~0, 接收到的有效字节数目
uint16_t UART1_RX_STA=0;
#define SIZE 12
char buffer[SIZE];
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
// 判断中断是由哪个串口触发的
if(huart->Instance == USART1)
{
// 判断接收是否完成(UART1_RX_STA bit15 位是否为1)
if((UART1_RX_STA & 0x8000) == 0)
{
// 如果已经收到了 0x0d (回车),
if(UART1_RX_STA & 0x4000)
{
// 则接着判断是否收到 0x0a (换行)
if(buf == 0x0a)
{
// 如果 0x0a 和 0x0d 都收到,则将 bit15 位置为1
UART1_RX_STA |= 0x8000;
// 灯控指令
if(!strcmp(UART1_RX_Buffer, "OPEN"))
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_3, GPIO_PIN_RESET);
if(!strcmp(UART1_RX_Buffer, "CLOSE"))
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_3, GPIO_PIN_SET);
memset(UART1_RX_Buffer, 0, UART1_REC_LEN);
UART1_RX_STA = 0;
}
else
// 否则认为接收错误,重新开始
UART1_RX_STA = 0;
}
else // 如果没有收到了 0x0d (回车)
{
//则先判断收到的这个字符是否是 0x0d (回车)
if(buf == 0x0d)
{
// 是的话则将 bit14 位置为1
UART1_RX_STA |= 0x4000;
}
else
{
// 否则将接收到的数据保存在缓存数组里
UART1_RX_Buffer[UART1_RX_STA & 0X3FFF] = buf;
UART1_RX_STA++;
// 如果接收数据大于UART1_REC_LEN(200字节),则重新开始接收
if(UART1_RX_STA > UART1_REC_LEN - 1)
UART1_RX_STA = 0;
}
}
}
// 重新开启中断
HAL_UART_Receive_IT(&huart1, &buf, 1);
}
}
int fputc(int ch, FILE *f)
{
unsigned char temp[1]={ch};
HAL_UART_Transmit(&huart1,temp,1,0xffff);
return ch;
}记得勾选Use Micro LIB
dht11.c
#include "dht11.h"
#include "gpio.h"
#define DHT_HIGH HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_SET)
#define DHT_LOW HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_RESET)
#define DHT_VALUE HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7)
char datas[5];
void delay_us(uint16_t cnt)
{
uint8_t i;
while(cnt)
{
for (i = 0; i < 10; i++)
{
}
cnt--;
}
}
void DHT_GPIO_Init(uint32_t mode)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin : PB8 */
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Mode = mode;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
void DHT11_Start()
{
DHT_GPIO_Init(GPIO_MODE_OUTPUT_PP);
DHT_HIGH;
DHT_LOW;
HAL_Delay(30);
DHT_HIGH;
DHT_GPIO_Init(GPIO_MODE_INPUT);
while(DHT_VALUE);
while(!DHT_VALUE);
while(DHT_VALUE);
}
void Read_Data_From_DHT(void)
{
int i;//轮
int j;//每一轮读多少次
char tmp;
char flag;
DHT11_Start();
DHT_GPIO_Init(GPIO_MODE_INPUT);
for(i= 0;i < 5;i++){
//卡g点:while(!dht) 有效数据都是高电平,持续时间不一样,50us读,低电平0 高电平
for(j=0;j<8;j++){
while(!DHT_VALUE);//等待卡g点
delay_us(40);
if(DHT_VALUE == 1){
flag = 1;
while(DHT_VALUE);
}else{
flag = 0;
}
tmp = tmp << 1;
tmp |= flag;
}
datas[i] = tmp;
}
}lcd1602.c
#include "lcd1602.h"
#include "gpio.h"
#define RS_GPIO_Port GPIOB
#define RW_GPIO_Port GPIOB
#define EN_GPIO_Port GPIOB
#define RS_GPIO_PIN GPIO_PIN_1
#define RW_GPIO_PIN GPIO_PIN_2
#define EN_GPIO_PIN GPIO_PIN_10
#define RS_HIGH HAL_GPIO_WritePin(RS_GPIO_Port, RS_GPIO_PIN, GPIO_PIN_SET)
#define RS_LOW HAL_GPIO_WritePin(RS_GPIO_Port, RS_GPIO_PIN, GPIO_PIN_RESET)
#define RW_HIGH HAL_GPIO_WritePin(RW_GPIO_Port, RW_GPIO_PIN, GPIO_PIN_SET)
#define RW_LOW HAL_GPIO_WritePin(RW_GPIO_Port, RW_GPIO_PIN, GPIO_PIN_RESET)
#define EN_HIGH HAL_GPIO_WritePin(EN_GPIO_Port, EN_GPIO_PIN, GPIO_PIN_SET)
#define EN_LOW HAL_GPIO_WritePin(EN_GPIO_Port, EN_GPIO_PIN, GPIO_PIN_RESET)
void Write_Cmd_Func(char cmd)
{
RS_LOW;
RW_LOW;
EN_LOW;
GPIOA->ODR = cmd;
HAL_Delay(5);
EN_HIGH;
HAL_Delay(5);
EN_LOW;
}
void Write_Data_Func(char dataShow)
{
RS_HIGH;
RW_LOW;
EN_LOW;
GPIOA->ODR = dataShow;
HAL_Delay(5);
EN_HIGH;
HAL_Delay(5);
EN_LOW;
}
void LCD1602_INIT(void)
{
//(1)延时 15ms
HAL_Delay(15);
//(2)写指令 38H(不检测忙信号)
Write_Cmd_Func(0x38);
//(3)延时 5ms
HAL_Delay(5);
//(4)以后每次写指令,读/写数据操作均需要检测忙信号
//(5)写指令 38H:显示模式设置
Write_Cmd_Func(0x38);
//(6)写指令 08H:显示关闭
Write_Cmd_Func(0x08);
//(7)写指令 01H:显示清屏
Write_Cmd_Func(0x01);
//(8)写指令 06H:显示光标移动设置
Write_Cmd_Func(0x06);
//(9)写指令 0CH:显示开及光标设置}
Write_Cmd_Func(0x0c);
}
void LCD1602_showLine(char row, char col, char *string)
{
switch(row){
case 1:
Write_Cmd_Func(0x80+col);
while(*string){
Write_Data_Func(*string);
string++;
}
break;
case 2:
Write_Cmd_Func(0x80+0x40+col);
while(*string){
Write_Data_Func(*string);
string++;
}
break;
}
}按照上述代码后,连接实物,打开对应的手机蓝牙APP连接就可以使用了。



![C# - Opencv应用(3) 之矩阵Mat使用[图像截取粘贴、ROI操作、位运算、数学计算]](https://img-blog.csdnimg.cn/direct/6e39bbf36af944cd9ed5525ff5a7c8ba.png)
