参看:自动驾驶感知——毫米波雷达
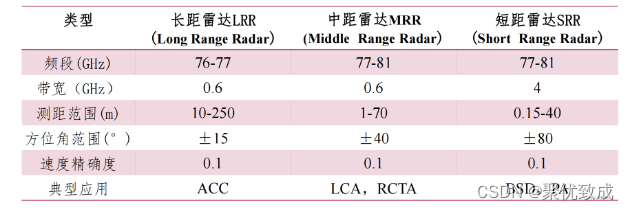
一、雷达分类
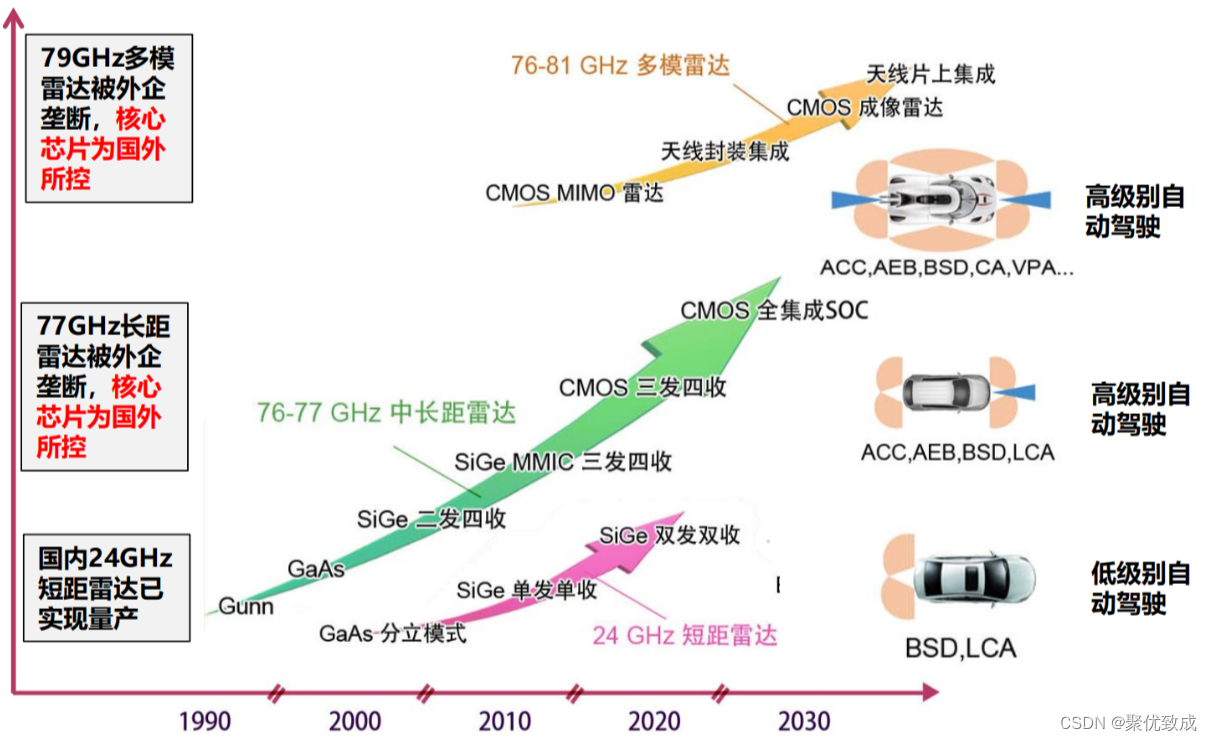
二、毫米波雷达信号频段
三、车载毫米波雷达的重要参数
常见参数
- 探测距离 (车辆0.5m ~ 200m 行人0.5m ~ 70m)
- 距离向精度 (±0.15 m)
- 距离向分辨率 ( 0.5 m)
- 测速范围 ( -260 km/h ~ 130 km/h)
- 测速精度 (±0.1 m/s)
- 测速分辨率 ( 0.3 m/s)
- 方位向视场角 (±5°@ 200 m ±15°@ 100 m ±22°@ 60 m ±45°@ 30 m)
- 方位向角精度 ( ±0.3°@ 0°)
- 方位向角分辨率 (3°~ 7°)
- 俯仰角探测范围 (-6°~ 6°)
- 最多目标数量 64
- 刷新率 (50ms)
指标分解
1、工作频段
2、探测距离
参看:雷达--------探测距离、分辨力、距离精度、方位精度、抗干扰力
这部分,只做了解。我是看不懂这些公式的。。。
关于探测距离首先先从来了解一下雷达方程的简单行式。
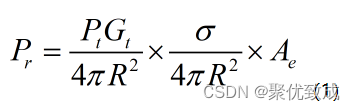
上式中右侧第一项表示的是增益为Gt的天线辐射功率为Pt在离雷达距离R处的功率密度。右侧第二项的分子σ是目标截面积(平方米),是目标返回雷达方向的能量的度量;分母表示回波信号能量在返回向雷达的途径上随距离的发散程度(为目标截面积)。这两项相乘得到的是每平方米上返回雷达的功率。Ae称为有效孔径面积。Pr为接收功率。所以求得的雷达的最大作用距离应为接收功率Pr等于雷达最小可检测信号Smin时雷达的探测距离。所以:
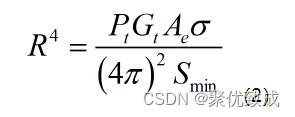
其中与发射增益Gt一样还有接收天线增益Gr。而接收天线增益Gr与有效孔径面积Ae的关系为:
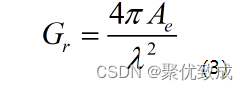
将3式代入2式中可得:
其中λ为雷达的信号波长。上式中的Smin受噪声以及系统的限制。可表示为:
其中k为玻尔兹曼常数,T0为噪声温度、B为接收系统等效带宽、Mn为识别系数、Ls是系统损耗、Nf为噪声系数。