一、前言
随着科技的不断进步和应用需求的增加,测距仪成为了许多领域必备的工具之一。传统的测距仪价格昂贵、体积庞大,使用起来不够方便。本项目采用STC89C52单片机作为主控芯片,结合XKC-KL200激光测距模块和LCD1602显示器,实现了一个简易且高效的激光测距仪。这个测距仪可以帮助用户快速准确地测量目标与测距仪之间的距离,并将结果通过LCD1602显示器直观地展示出来。
目前很多测距仪主要采用超声波或红外线等技术进行测量,但这些方法存在一定的局限性,比如受到环境干扰、测量距离有限等问题。而激光测距技术在测量精度和稳定性方面具有显著优势。XKC-KL200模块是一款基于激光测距原理的模块,具有高精度、快速测量等特点。通过与STC89C52单片机相结合,能够利用模块提供的数据和功能,快速实现一个功能完善的激光测距仪。
LCD1602显示器作为输出设备,能够直观地显示测得的距离信息,具有体积小巧、低功耗、易于集成等特点,非常适合作为测距仪的显示屏。通过将测量结果转换为字符串,并利用LCD1602的命令和数据写入函数,可以在显示器上清晰地展示出测得的距离值。
基于STC89C52单片机和XKC-KL200激光测距模块的激光测距仪项目,结合了激光测距技术和单片机控制技术,通过LCD1602显示器直观地展示出测得的距离信息。这个项目不仅满足了测距需求,而且具有成本低、体积小、使用方便等优势,无论是在建筑、工程、地理测量还是运动、航空等领域,这个激光测距仪都可以正常使用。
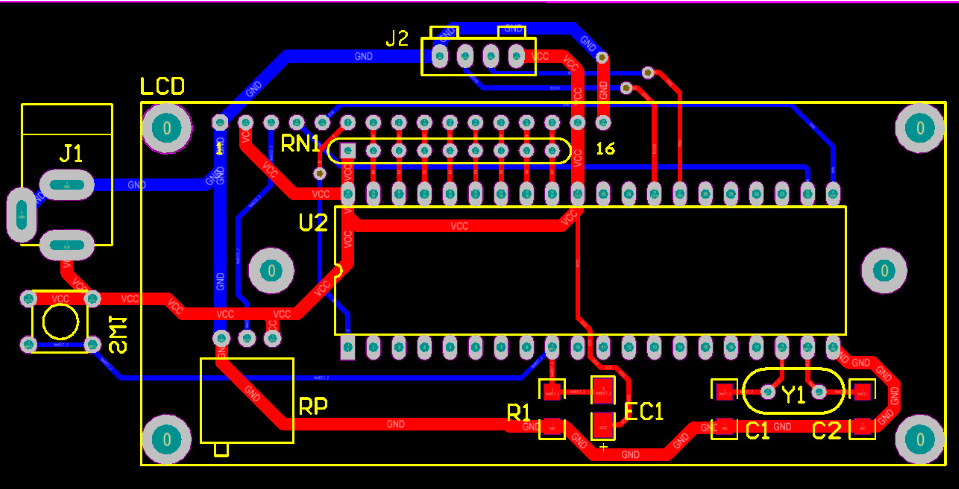
二、硬件连线说明
【1】LCD1602模块
(1)VSS 引脚连接到单片机的GND引脚(地线)
(2)VDD 引脚连接到单片机的5V引脚(正电源)
(3)VO 引脚可以通过一个10K电位器连接到单片机的GND引脚,用于调节背光亮度
(4)RS 引脚连接到单片机的P0口(作为命令/数据选择引脚)
(5)RW 引脚连接到单片机的GND引脚(将LCD设为写模式)
(6)E 引脚连接到单片机的P1口(作为使能引脚)
(7)D0 ~ D7 引脚分别连接到单片机的P2 ~ P7口(作为数据引脚)
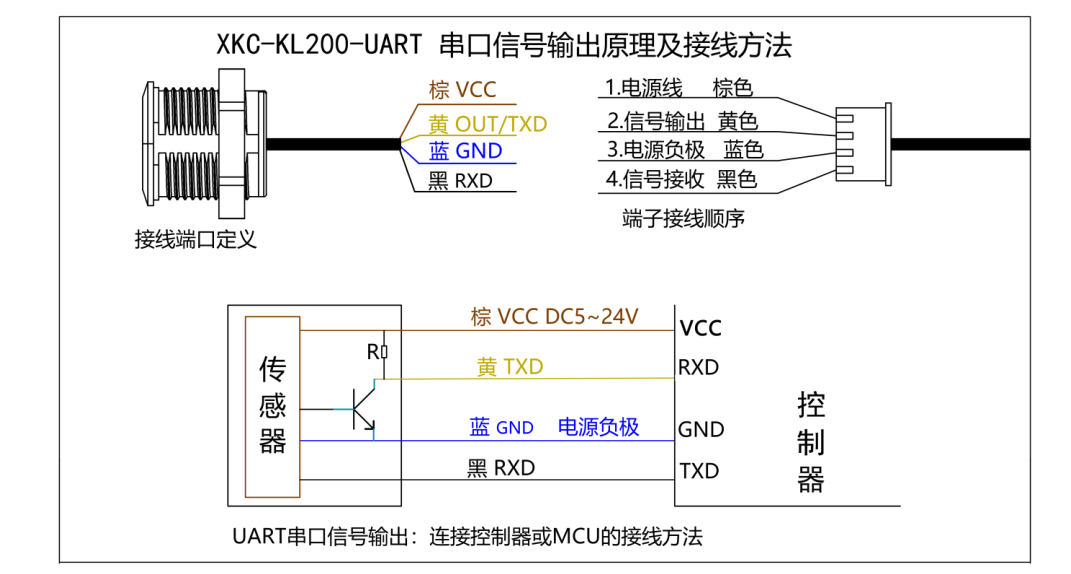
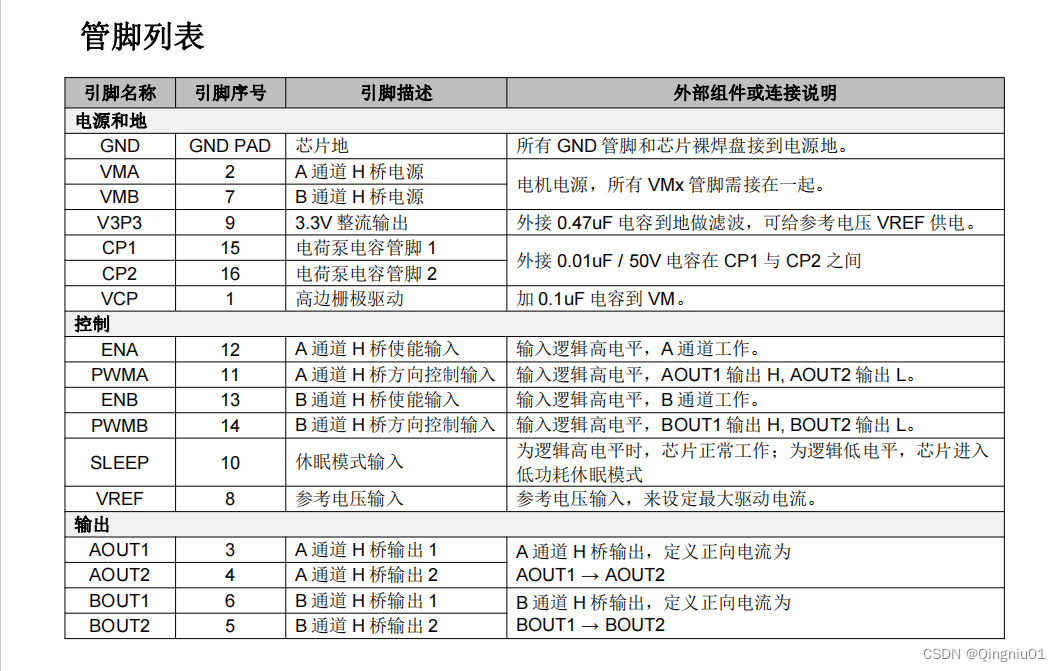
【2】XKC-KL200激光测距模块
(1)VCC 引脚连接到单片机的5V引脚(正电源)
(2)GND 引脚连接到单片机的GND引脚(地线)
(3)TX 引脚连接到单片机的RXD引脚(串口接收引脚)
(4)RX 引脚连接到单片机的TXD引脚(串口发送引脚)
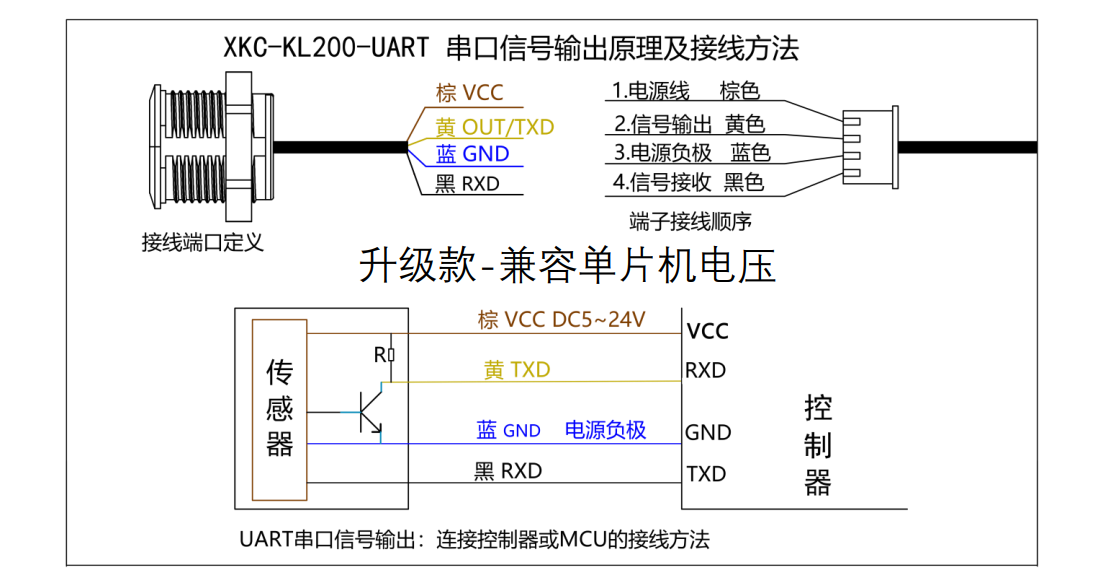
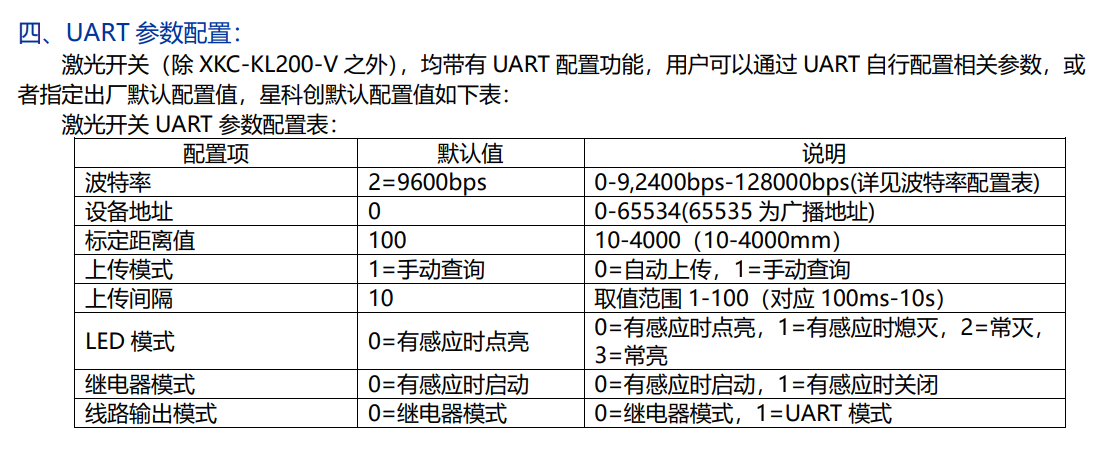
三、XKC-KL200激光测距模块
XKC-KL200 是一款智能非接触式开关、带有 UART 串口,高低电平或 NPN 驱动输出的激光测距传感器。
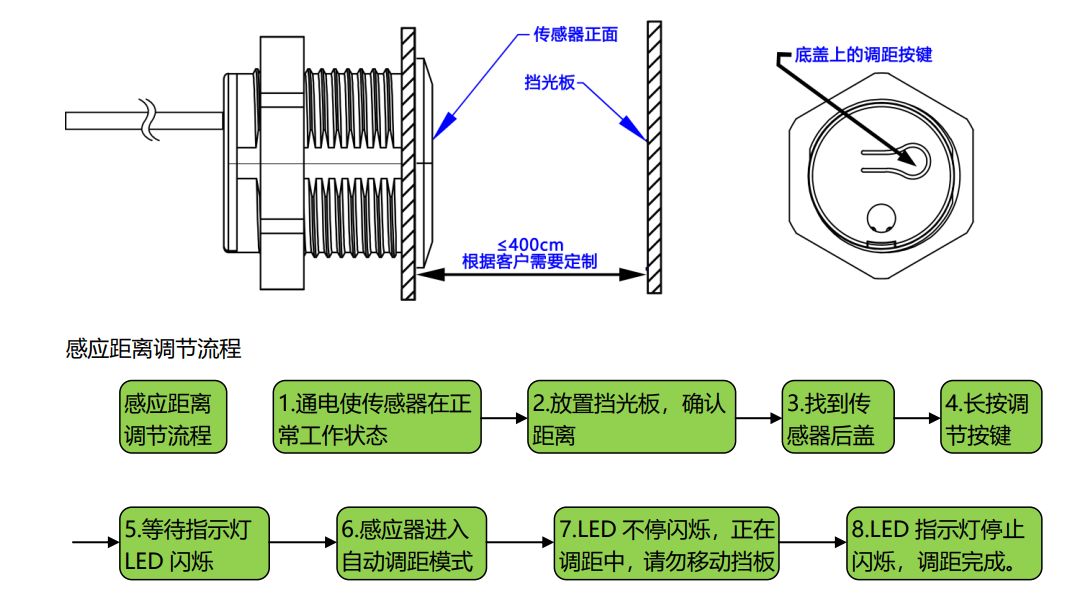
该传感器利用激光对物体漫反射原理:当人或物体进入传感器设定的感应区域,传感器输出信号,同时能精确输出
距离;人或物体离开感应区后传感器则关闭输出。
通信协议
硬件采用 uart。 棕色(VCC)、黄色(信号输出)蓝色(GND)、黑色(RXD)
供电 5~24V
在客户 MCU 电源与 OUTPUT(黄线)之间跨接一个 1K 左右的上拉电阻。
串口默认配置: 波特率:9600 、数据位:8 、校验位:无 、停止位:1
应用范围
(1)智能感应洁具。
(2)家居安防。
(3)智能检测,智能控制。
(4)机器人障碍识别。
(5)实时显示距离。
(6)水龙头感应、大小便斗自动冲水、自动烘手机、防盗器、自动门铃、楼梯过道感应、电视近距离收看电视
提醒器、自动门、广告灯箱、自动垃圾箱。
四、项目代码设计
#include <reg52.h>
#include <stdio.h>
// LCD1602引脚连接
sbit LCD_RS = P0^0; // RS引脚接口定义
sbit LCD_E = P1^0; // E引脚接口定义
sbit LCD_D4 = P2^4; // D4引脚接口定义
sbit LCD_D5 = P2^5; // D5引脚接口定义
sbit LCD_D6 = P2^6; // D6引脚接口定义
sbit LCD_D7 = P2^7; // D7引脚接口定义
// 激光测距模块引脚连接
sbit laser_TX = P3^0; // TX引脚接口定义
sbit laser_RX = P3^1; // RX引脚接口定义
// LCD1602初始化
void LCD_Init() {
LCD_WriteCommand(0x02); // 回到Home位置
LCD_WriteCommand(0x28); // 设置4位数据总线、2行显示、5x8点阵
LCD_WriteCommand(0x0C); // 显示开,关游标
LCD_WriteCommand(0x06); // 光标右移
LCD_WriteCommand(0x01); // 清屏
}
// 向LCD写入命令
void LCD_WriteCommand(unsigned char command) {
LCD_RS = 0; // 将RS置低,指定为写入命令
LCD_E = 0; // 拉低E线,准备写入
LCD_D4 = command >> 4 & 0x01; // 写入高4位数据
LCD_D5 = command >> 5 & 0x01;
LCD_D6 = command >> 6 & 0x01;
LCD_D7 = command >> 7 & 0x01;
LCD_E = 1; // 拉高E线,写入命令
DelayMs(1); // 延时等待
LCD_E = 0; // 拉低E线,结束写入
LCD_D4 = command >> 0 & 0x01; // 写入低4位数据
LCD_D5 = command >> 1 & 0x01;
LCD_D6 = command >> 2 & 0x01;
LCD_D7 = command >> 3 & 0x01;
LCD_E = 1; // 拉高E线,写入命令
DelayMs(1); // 延时等待
LCD_E = 0; // 拉低E线,结束写入
}
// 向LCD写入数据
void LCD_WriteData(unsigned char dat) {
LCD_RS = 1; // 将RS置高,指定为写入数据
LCD_E = 0; // 拉低E线,准备写入
LCD_D4 = dat >> 4 & 0x01; // 写入高4位数据
LCD_D5 = dat >> 5 & 0x01;
LCD_D6 = dat >> 6 & 0x01;
LCD_D7 = dat >> 7 & 0x01;
LCD_E = 1; // 拉高E线,写入数据
DelayMs(1); // 延时等待
LCD_E = 0; // 拉低E线,结束写入
LCD_D4 = dat >> 0 & 0x01; // 写入低4位数据
LCD_D5 = dat >> 1 & 0x01;
LCD_D6 = dat >> 2 & 0x01;
LCD_D7 = dat >> 3 & 0x01;
LCD_E = 1; // 拉高E线,写入数据
DelayMs(1); // 延时等待
LCD_E = 0; // 拉低E线,结束写入
}
// 清空LCD显示
void LCD_Clear() {
LCD_WriteCommand(0x01); // 清屏指令
DelayMs(2); // 延时等待
}
// 在指定位置显示字符串
void LCD_DisplayString(unsigned char x, unsigned char y, unsigned char *str) {
unsigned char addr;
if (y == 0) {
addr = 0x80 + x; // 第一行地址计算
} else {
addr = 0xC0 + x; // 第二行地址计算
}
LCD_WriteCommand(addr); // 设置显示位置
while (*str != '\0') {
LCD_WriteData(*str); // 逐个显示字符
str++;
}
}
// 毫秒级延时函数
void DelayMs(unsigned int ms) {
unsigned int i, j;
for (i = ms; i > 0; i--) {
for (j = 110; j > 0; j--);
}
}
// 串口初始化
void UART_Init() {
TMOD = 0x20; // 设置定时器1为模式2
TH1 = 0xFD; // 设置波特率为9600
TL1 = 0xFD;
TR1 = 1; // 启动定时器1开始工作
SCON = 0x50; // 设置UART为模式1,允许接收
}
// 串口数据接收
unsigned char UART_Receive() {
while (!RI); // 等待接收完成
RI = 0;
return SBUF; // 返回接收到的数据
}
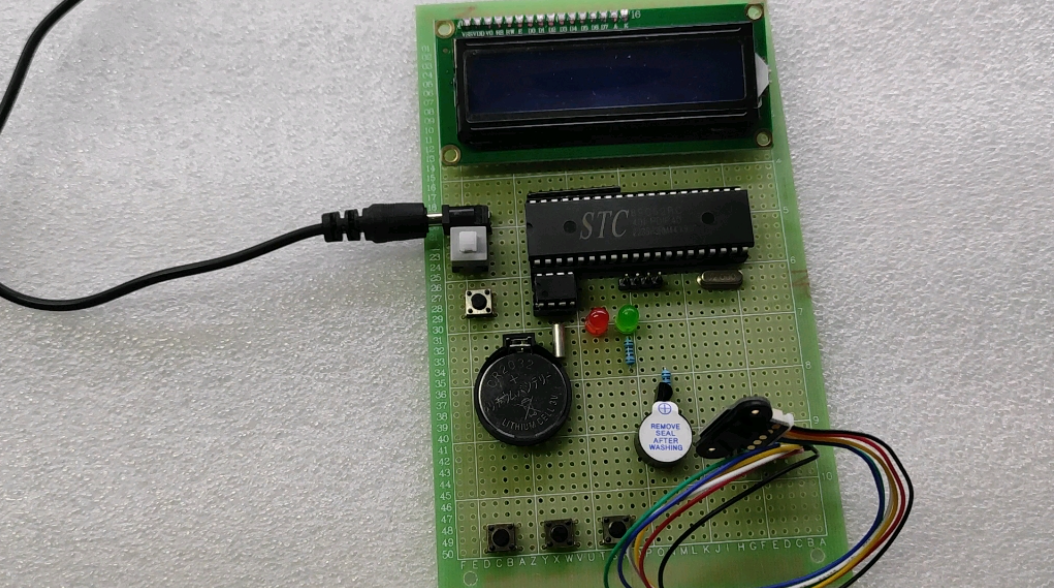
五、总结
在本项目中,成功设计了一个激光测距仪,使用STC89C52作为主控芯片,搭配XKC-Kl200激光测距模块。通过串口通信的方式,能够获取到被测物体与激光测距模块之间的距离,并将其实时显示在LCD1602液晶显示屏上。
项目的实现过程中,先进行硬件连接,将STC89C52与XKC-Kl200模块通过串口相连,连接了LCD1602显示屏。编写程序代码,LCD1602和串口通信的初始化函数,以及数据的接收和显示函数。
通过激光测距仪,可以方便地获得不同物体与测距模块之间的距离信息,并通过LCD1602显示出来。这为测量工作提供了便利,无论是在科研实验、工程测量还是日常生活中,都具有广泛的应用前景。



![[c++]—string类___深度学习string标准库成员函数与非成员函数](https://img-blog.csdnimg.cn/direct/cb57cab79c534ea08e05975a73db5beb.png)