谱方法学习笔记📒
谱方法学习笔记-下(超详细)
声明:鉴于CSDN使用
K
a
T
e
X
KaTeX
KaTeX 渲染公式,
KaTeX
\KaTeX
KATEX 与
L
a
T
e
X
LaTeX
LaTeX 不同,不支持直接的交叉引用命令,如\label和\eqref。
KaTeX
\KaTeX
KATEX专注于数学公式的呈现,而不提供完整的文档生成功能。因此,为了保证显示正常,本文中所有公式均已删除编号和交叉引用。由此可能导致一些可读性上的不便,请读者谅解。
文章目录
- 谱方法学习笔记📒
- 傅立叶谱方法
- 求导与傅里叶谱方法
- 傅立叶谱方法的步聚
- 傅里叶谱方法求解基本偏微分方程---一维波动方程
- 傅里叶谱方法求解基本偏微分方程—二维波动方程
傅立叶谱方法
对于在
(
−
∞
,
∞
)
(-\infty, \infty)
(−∞,∞) 有定义且绝对可积、并在任一有限区间上满足狄利克莱条件的函数
u
(
x
)
u(x)
u(x), 傅里叶变换(Fourier transform)及其逆变换(inverse Fourier transform) 定义为:
u
^
(
k
)
=
∫
−
∞
∞
u
(
x
)
e
−
i
k
x
d
x
\hat{u}(k)=\int_{-\infty}^{\infty} u(x) \mathrm{e}^{-\mathrm{i} k x} \mathrm{~d} x% \label{3-1}
u^(k)=∫−∞∞u(x)e−ikx dx
u ( x ) = 1 2 π ∫ − ∞ ∞ u ^ ( k ) e i k x d k u(x)=\frac{1}{2 \pi} \int_{-\infty}^{\infty} \hat{u}(k) \mathrm{e}^{\mathrm{i} k x} \mathrm{~d} k % \label{3-2} u(x)=2π1∫−∞∞u^(k)eikx dk
上述定义式给出了一个傅里叶变换对 (Fourier transform pair), 本专栏中将它们记为 u ^ ( k ) = F [ u ( x ) ] \hat{u}(k)=F[u(x)] u^(k)=F[u(x)] 和 u ( x ) = F − 1 [ u ^ ( k ) ] u(x)=F^{-1}[\hat{u}(k)] u(x)=F−1[u^(k)] .实际上, 傅里叶变换对的定义并不是唯一的, 两个定义式中的系数可以随意修改, 只要它们的积为 1 / 2 π 1 / 2 \pi 1/2π 即可.此外, 定义式中的 e − i k x \mathrm{e}^{-\mathrm{i} k x} e−ikx 和 e i k x \mathrm{e}^{\mathrm{i} k x} eikx (称为积分变换的核) 也可以互换.容易知道, u ( x ) u(x) u(x) 先后经过傅里叶变换及其逆变换仍将得到它本身, 即: u ( x ) = F − 1 { F [ u ( x ) ] } u(x)=F^{-1}\{F[u(x)]\} u(x)=F−1{F[u(x)]} .
通常来讲, 若不对 “傅里叶变换” 加任何限定, 那么它指的就是连续傅里叶变换, 也 就是针对定义在无限区间内的连续函数
u
(
x
)
u(x)
u(x) 的傅里叶变换, 这是在理想条件下的数学定义. 在实际应用中, 尤其是计算机的信号采样、信号处理当中, 信号是离散的、有限的, 离散傅里叶变换(discrete Fourier transform) 就是针对这一情况提出的.在 Matlab 中, 对于序列
u
1
,
…
,
u
j
,
…
,
u
N
u_1, \ldots, u_j, \ldots, u_N
u1,…,uj,…,uN 的离散傅里叶变换及逆变换定义为:
u
^
k
=
∑
j
=
1
N
u
j
e
−
2
π
(
j
−
1
)
(
k
−
1
)
i
N
,
k
=
1
,
…
,
N
\hat{u}_k=\sum_{j=1}^N u_j \mathrm{e}^{\frac{-2 \pi(j-1)(k-1) \mathrm{i}}{N}}, \quad k=1, \ldots, N % \label{3-4}
u^k=j=1∑NujeN−2π(j−1)(k−1)i,k=1,…,N
u j = 1 N ∑ k = 1 N u ^ k e 2 π ( j − 1 ) ( k − 1 ) i N , j = 1 , … , N u_j=\frac{1}{N} \sum_{k=1}^N \hat{u}_k \mathrm{e}^{\frac{2 \pi(j-1)(k-1) \mathrm{i}}{N}}, \quad j=1, \ldots, N% \label{3-5} uj=N1k=1∑Nu^keN2π(j−1)(k−1)i,j=1,…,N
同样, 上述定义中的归一化系数也可以有其他选择, 但它们的乘积必须为 1 / N 1 / N 1/N .如果将序列 u 1 , … , u j , … , u N u_1, \ldots, u_j, \ldots, u_N u1,…,uj,…,uN 看作等间隔空间(时间)点上的信号幅度值, 那么经过离散傅里叶变换得到的序列 u ^ 1 , … , u ^ k , … , u ^ N \hat{u}_1, \ldots, \hat{u}_k, \ldots, \hat{u}_N u^1,…,u^k,…,u^N 就是其相应的频谱信息.通过定义式 % \eqref{3-4} 和 % \eqref{3-5} 容易得到 u ^ k = u ^ k + N \hat{u}_k=\hat{u}_{k+N} u^k=u^k+N 和 u j = u j + N u_j=u_{j+N} uj=uj+N, 这就是说, 离散傅里叶变换已经隐含了周期性边界条件.
在 Matlab 中,fft 和 ifft 函数实现基于快速傅里叶变换算法的一维离散傅里叶变换及逆变换。fft 函数的一般调用语法为:
fft(u)
若u为一向量,则 fft 返回其离散傅里叶变换的结果。若 u为一矩阵,则 fft 返回矩阵中每一列的离散傅里叶变换。若要计算矩阵 u 中每一行的离散傅里叶变换,只需调用 fft(u,[],2)即可,它速度比 fft(u.').'更快一些。ifft 函数的调用语法与 fft 函数完全一样。
若输入 fft 函数的空域信号序列
u
1
,
.
.
.
,
u
j
,
.
.
.
,
u
N
u_1,...,u_j,...,u_N
u1,...,uj,...,uN 在
x
x
x 轴上的坐标间隔是
L
/
N
L/N
L/N , 相应的横坐标
x
x
x 可认为是:
− L / 2 , − L / 2 + L / N , … , L / 2 − 2 L / N , L / 2 − L / N -L/2,-L/2+L/N,\ldots,L/2-2L/N,L/2-L/N −L/2,−L/2+L/N,…,L/2−2L/N,L/2−L/N
注意,fft 函数输出的序列
u
^
1
,
.
.
.
,
u
^
k
,
.
.
.
,
u
^
N
\hat{u}_1,...,\hat{u}_k,...,\hat{u}_N
u^1,...,u^k,...,u^N 所对应的频率并不是按照从小到大的顺序排列的,而是非负频率对应于前半部分序列,负频率对应于后半部分序列,即:
0 , 2 π / L , 4 π / L , … , ( N − 4 ) π / L , ( N − 2 ) π / L , − N π / L , − ( N − 2 ) π / L , … , − 4 π / L , − 2 π / L 0,2\pi/L,4\pi/L,\ldots,(N-4)\pi/L,(N-2)\pi/L,-N\pi/L,-(N-2)\pi/L,\ldots,-4\pi/L,-2\pi/L 0,2π/L,4π/L,…,(N−4)π/L,(N−2)π/L,−Nπ/L,−(N−2)π/L,…,−4π/L,−2π/L
因此 Matlab 提供了 fftshift 函数,用于调整 fft 输出序列的顺序。也就是说,fftshift(fft(u)) 所对应的频率才是按照递增顺序排列的:
− N π / L , − ( N − 2 ) π / L , … , − 2 π / L , 0 , 2 π / L , … , ( N − 4 ) π / L , ( N − 2 ) π / L -N\pi/L,-(N-2)\pi/L,\ldots,-2\pi/L,0,2\pi/L,\ldots,(N-4)\pi/L,(N-2)\pi/L −Nπ/L,−(N−2)π/L,…,−2π/L,0,2π/L,…,(N−4)π/L,(N−2)π/L
空域坐标与频域坐标的关系如下表所示,不难发现,空域上的两点间隔和频域区间长度成反比,乘积为 2 π 2\pi 2π, 频域上的两点间隔和空域区间长度的关系亦如此。
| 两点间隔 | 区间长度 | |
|---|---|---|
| 空域坐标 | L / N L / N L/N | L L L |
| 频域坐标 | 2 π / L 2 \pi / L 2π/L | 2 π N / L 2 \pi N / L 2πN/L |
此外还有 ifftshift 函数用于进行与 fftshift 函数相反的操作。实际上,fftshift 函数的作用仅是让 fft 的输出结果变得更易于观察,若还需要用 ifft 函数将频谱信息还原回空域信号,就必须在使用 fftshift 之后再用 ifftshift 函数将序列的顺序恢复,否则得不到正确结果。如果不是为了分析频谱信息,而是用下文即将介绍的傅里叶谱方法处理导数和微分问题,则大可不必使用 fftshift 和 ifftshift 函数调整序列的顺序,以减少代码冗余、 节约时间。
基于快速傅里叶变换算法的二维离散傅里叶变换及逆变换由 fft2、ifft2 函数实现,一般调用语法为:
fft2(u)
它返回矩阵 u 的二维傅里叶变换,等效于 fft(fft(u),[],2)。ifft2 与 fft2 的调用语法一样,就不再赘述。
fftshift 函数的调用语法为:
fftshift(u)
若u为一向量,它将 u 左右两半互换并返回。若 u 为一矩阵,则它将 u 的第 1、3 象限互换以及第 2、4 象限互换并返回。此外,若要互换矩阵 u 的上下两半,可以调用 fftshift(u,1)。要互换矩阵 u 的左右两半,只需调用 fftshift(u,2)。ifftshift 函数与 fftshift 函数功能完全相反, 调用语法相同,这里不再重复。
求导与傅里叶谱方法
对于
F
[
u
′
(
x
)
]
F\left[u^{\prime}(x)\right]
F[u′(x)], 由傅里叶变换的定义和分部积分法, 得到:
F
[
u
′
(
x
)
]
=
∫
−
∞
∞
u
′
(
x
)
e
−
i
k
x
d
x
=
u
(
x
)
e
−
i
k
x
∣
−
∞
∞
−
∫
−
∞
∞
u
(
x
)
(
−
i
k
)
e
−
i
k
x
d
x
F\left[u^{\prime}(x)\right]=\int_{-\infty}^{\infty} u^{\prime}(x) \mathrm{e}^{-\mathrm{i} k x} \mathrm{~d} x=\left.u(x) \mathrm{e}^{-\mathrm{i} k x}\right|_{-\infty} ^{\infty}-\int_{-\infty}^{\infty} u(x)(-\mathrm{i} k) \mathrm{e}^{-\mathrm{i} k x} \mathrm{~d} x% \label{3-7}
F[u′(x)]=∫−∞∞u′(x)e−ikx dx=u(x)e−ikx
−∞∞−∫−∞∞u(x)(−ik)e−ikx dx
当
∣
x
∣
→
∞
\mid x\mid \rightarrow \infty
∣x∣→∞ 时,
u
(
x
)
→
0
u(x) \rightarrow 0
u(x)→0, 则:
F
[
u
′
(
x
)
]
=
i
k
∫
−
∞
∞
u
(
x
)
e
−
i
k
x
d
x
=
i
k
F
[
u
(
x
)
]
F\left[u^{\prime}(x)\right]=\mathrm{i} k \int_{-\infty}^{\infty} u(x) \mathrm{e}^{-\mathrm{i} k x} \mathrm{~d} x=\mathrm{i} k F[u(x)]% \label{3-8}
F[u′(x)]=ik∫−∞∞u(x)e−ikx dx=ikF[u(x)]
类似地, 可以得到:
F
[
u
(
n
)
(
x
)
]
=
(
i
k
)
n
F
[
u
(
x
)
]
F\left[u^{(n)}(x)\right]=(\mathrm{i} k)^n F[u(x)]% \label{3-9}
F[u(n)(x)]=(ik)nF[u(x)]
其中
u
(
n
)
(
x
)
u^{(n)}(x)
u(n)(x) 代表
u
(
x
)
u(x)
u(x) 的
n
n
n 阶导数.上式的意义在于:函数的求导运算在傅里叶变换的作用下, 可转化为相对简单的代数运算, 即:
u
(
n
)
(
x
)
=
F
−
1
{
(
i
k
)
n
F
[
u
(
x
)
]
}
u^{(n)}(x)=F^{-1}\left\{(\mathrm{i} k)^n F[u(x)]\right\}
u(n)(x)=F−1{(ik)nF[u(x)]} .正是基于此原理, 傅里叶谱方法 (Fourier spectral method) 利用傅里叶变换将偏微分方程中空域 (space domain)或时域(time domain)上的求导运算简化为频域 ( spectral domain) 上的代数运算, 求解后再通过傅里叶逆变换得到空域或时域上的结果.在代码层面上, Matlab 提供的快速傅里叶变换函数 fft、逆变换函数 ifft 以及强大的矩阵运算能力也为简洁、优雅地实现傅里叶谱方法奠定了基础.
如前所述,fft 输出结果在频域上的顺序是颠倒的,经过 fft 函数变换后的序列在
k
k
k 轴上所对应的坐标是:
0
,
2
π
/
L
,
4
π
/
L
,
.
.
.
,
(
N
−
4
)
π
/
L
,
(
N
−
2
)
π
/
L
,
−
N
π
/
L
,
−
(
N
−
2
)
π
/
L
,
.
.
.
,
−
4
π
/
L
,
−
2
π
/
L
0,2\pi/L,4\pi/L,...,(N-4)\pi/L,(N-2)\pi/L,-N\pi/L,-(N-2)\pi/L,...,-4\pi/L,-2\pi/L
0,2π/L,4π/L,...,(N−4)π/L,(N−2)π/L,−Nπ/L,−(N−2)π/L,...,−4π/L,−2π/L
利用傅里叶谱方法求导时,在代码中通常使用顺序颠倒的频域坐标,以求序列 u 的一阶导数数值解为例:ifft(i*k.*fft(u))。其中,变量 k 是由 Matlab 语句 (2*pi/L)*[0:N/2-1 -N/2:-1] 生成的顺序颠倒的频域坐标,这样做是为了免去调用 fftshift 和 ifftshift 的步骤。
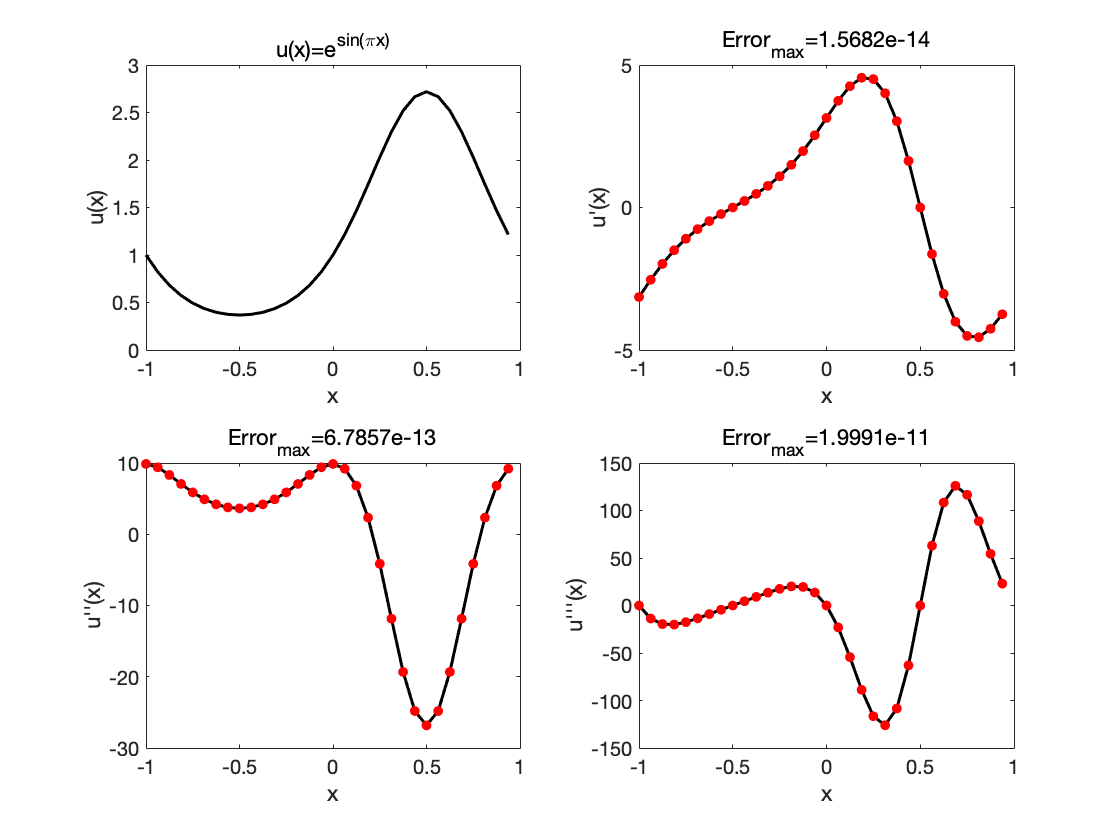
下面用实例说明傅里叶谱方法求 u ( x ) = e sin ( π x ) u(x)=\mathrm{e}^{\sin (\pi x)} u(x)=esin(πx) 的 1 、 2 、 3 1 、 2 、 3 1、2、3 阶导数的过程, 并与解析解
u
′
(
x
)
=
π
cos
(
π
x
)
e
sin
(
π
x
)
u^{\prime}(x)=\pi \cos (\pi x) \mathrm{e}^{\sin (\pi x)}
u′(x)=πcos(πx)esin(πx)
u
′
′
(
x
)
=
π
2
e
sin
(
π
x
)
[
cos
2
(
π
x
)
−
sin
(
π
x
)
]
u^{\prime \prime}(x)=\pi^2 \mathrm{e}^{\sin (\pi x)}\left[\cos ^2(\pi x)-\sin (\pi x)\right]
u′′(x)=π2esin(πx)[cos2(πx)−sin(πx)]
u
′
′
′
(
x
)
=
π
3
e
sin
(
π
x
)
cos
(
π
x
)
[
cos
2
(
π
x
)
−
3
sin
(
π
x
)
−
1
]
u^{\prime \prime \prime}(x)=\pi^3 \mathrm{e}^{\sin (\pi x)} \cos (\pi x)\left[\cos ^2(\pi x)-3 \sin (\pi x)-1\right]
u′′′(x)=π3esin(πx)cos(πx)[cos2(πx)−3sin(πx)−1]
相比较, 得到的最大误差分别在
1
0
−
14
、
1
0
−
13
、
1
0
−
11
10^{-14} 、 10^{-13} 、 10^{-11}
10−14、10−13、10−11 数量级, 如图所示.
 代码如下:
代码如下:
clear all; close all;
L=2; N=32;
x=L/N*[-N/2:N/2-1];
k=2*pi/L*[0:N/2-1 -N/2:-1];
u=exp(sin(pi*x)); ut=fft(u);
%导数的精确解
du_exact(:,1)=pi*cos(pi*x).*u;
du_exact(:,2)=pi^2*(cos(pi*x).^2-sin(pi*x)).*u;
du_exact(:,3)=pi^3*cos(pi*x).*(cos(pi*x).^2-3*sin(pi*x)-1).*u;
%谱方法求导
du_Fourier(:,1)=ifft(i*k.*ut);
du_Fourier(:,2)=ifft((i*k).^2.*ut);
du_Fourier(:,3)=ifft((i*k).^3.*ut);
error=max(abs(du_exact-du_Fourier));
%画图
labels={'u''(x)','u''''(x)','u''''''(x)'};
for n=1:4
subplot(2,2,n)
if n==1
plot(x,u,'k','LineWidth',1.5)
xlabel x, ylabel u(x), title('u(x)=e^{sin(\pix)}')
else
plot(x,du_exact(:,n-1),'k',x,du_Fourier(:,n-1),'.r' ...
,'MarkerSize',13,'LineWidth',1.5)
title(['Error_{max}=' num2str(error(n-1))])
xlabel x, ylabel(labels(n-1))
end
end
傅立叶谱方法的步聚
待求解的偏微分方程的普遍形式为:
∂
n
u
∂
t
n
=
L
u
+
N
(
u
)
\frac{\partial^n u}{\partial t^n}=L u+N(u)% \label{3-11}
∂tn∂nu=Lu+N(u)
其中,
u
(
x
,
t
)
u(x, t)
u(x,t) 为
x
、
t
x 、 t
x、t 的函数,
L
L
L 代表线性算符 (linear operator),
N
(
u
)
N(u)
N(u) 为非线性项 (nonlinear terms ).已知初始条件为
u
(
x
,
t
0
)
u\left(x, t_0\right)
u(x,t0), 在周期性边界条件下求某一时刻的
u
(
x
,
t
)
u(x, t)
u(x,t) .对于这样的问题, 总是可以通过变量代换的办法将等号左边对
t
t
t 的
n
n
n 阶导数降为 1 阶, 所以下面以等号左边是
∂
u
/
∂
t
\partial u / \partial t
∂u/∂t 的偏微分方程为例进行讨论, 这与式
% \eqref{3-11}
降阶后的偏微分方程组求解方法大同小异.
在
x
x
x 域上对以下方程做傅里叶变换:
∂
u
∂
t
=
L
u
+
N
(
u
)
\frac{\partial u}{\partial t}=L u+N(u)% \label{3-12}
∂t∂u=Lu+N(u)
得到:
∂
u
^
∂
t
=
α
(
k
)
u
^
+
F
[
N
(
u
)
]
\frac{\partial \hat{u}}{\partial t}=\alpha(k) \hat{u}+F[N(u)]% \label{3-13}
∂t∂u^=α(k)u^+F[N(u)]
其中,
u
^
(
k
,
t
)
\hat{u}(k, t)
u^(k,t) 代表
u
(
x
,
t
)
u(x, t)
u(x,t) 在
x
x
x 域上的傅里叶变换.为了展现对线性算符
L
L
L 及非线性项
N
(
u
)
N(u)
N(u) 做傅里叶变换的细节, 这里以
L = a ⋅ ∂ 2 / ∂ x 2 + b ⋅ ∂ / ∂ x + c L=a \cdot \partial^2 / \partial x^2+b \cdot \partial / \partial x+c L=a⋅∂2/∂x2+b⋅∂/∂x+c
N ( u ) = u 3 + u 3 ⋅ ∂ 2 u / ∂ x 2 + f ( x ) ⋅ ∂ u / ∂ x N(u)=u^3+u^3 \cdot \partial^2 u / \partial x^2+f(x) \cdot \partial u / \partial x N(u)=u3+u3⋅∂2u/∂x2+f(x)⋅∂u/∂x
为例进行分析, a 、 b a 、 b a、b 和 c c c 分别为常数.
对线性部分, 有 F [ L u ] = [ a ( i k ) 2 + b ( i k ) + c ] u ^ , F[L u]=\left[a(\mathrm{i} k)^2+b(\mathrm{i} k)+c\right] \hat{u}, F[Lu]=[a(ik)2+b(ik)+c]u^, 则式 % \eqref{3-13} 中的 α ( k ) = a ( i k ) 2 + b ( i k ) + c = \alpha(k)=a(\mathrm{i} k)^2+b(\mathrm{i} k)+c= α(k)=a(ik)2+b(ik)+c= − a k 2 + i b k + c -a k^2+\mathrm{i} b k+c −ak2+ibk+c .
对非线性部分, 需要将
u
、
∂
u
/
∂
x
u 、 \partial u / \partial x
u、∂u/∂x 和
∂
2
u
/
∂
x
2
\partial^2 u / \partial x^2
∂2u/∂x2 写为
F
−
1
[
u
^
]
、
F
−
1
[
i
k
u
^
]
F^{-1}[\hat{u}] 、 F^{-1}[\mathrm{i} k \hat{u}]
F−1[u^]、F−1[iku^] 和
F
−
1
[
(
i
k
)
2
u
^
]
F^{-1}\left[(\mathrm{i} k)^2 \hat{u}\right]
F−1[(ik)2u^], 则有
F
[
N
(
u
)
]
=
F
[
u
3
+
u
3
⋅
∂
2
u
/
∂
x
2
+
f
(
x
)
⋅
∂
u
/
∂
x
]
=
F
{
F
−
1
[
u
^
]
3
+
F
−
1
[
u
^
]
3
⋅
F
−
1
[
(
i
k
)
2
u
^
]
+
f
(
x
)
⋅
F
−
1
[
i
k
u
^
]
}
\begin{aligned} F[N(u)]&=F\left[u^3+u^3 \cdot \partial^2 u / \partial x^2+f(x) \cdot \partial u / \partial x\right]\\ &=F\left\{F^{-1}[\hat{u}]^3+F^{-1}[\hat{u}]^3 \cdot F^{-1}\left[(\mathrm{i} k)^2 \hat{u}\right]+f(x) \cdot F^{-1}[\mathrm{i} k \hat{u}]\right\}\end{aligned}
F[N(u)]=F[u3+u3⋅∂2u/∂x2+f(x)⋅∂u/∂x]=F{F−1[u^]3+F−1[u^]3⋅F−1[(ik)2u^]+f(x)⋅F−1[iku^]}
这样, 式
% \eqref{3-12}
中
u
(
x
,
t
)
u(x, t)
u(x,t) 对
x
x
x 的偏导数就都通过傅里叶变换及逆变换简化为式
% \eqref{3-13}
中
u
^
(
k
,
t
)
\hat{u}(k, t)
u^(k,t) 和
k
k
k 的代数运算了, 然后再将
u
^
\hat{u}
u^ 和
k
k
k 离散化, 偏微分方程就简化成了常微分方程组.数值计算
∂
u
^
(
k
,
t
)
/
∂
t
\partial \hat{u}(k, t) / \partial t
∂u^(k,t)/∂t 最直接的方法就是调用 Matlab 的 ode 系列函数, 优先选择 ode 45 函数, 最后用 ifft 函数将频域上的计算结果
u
^
(
k
,
t
)
\hat{u}(k, t)
u^(k,t) 变换回待求的
u
(
x
,
t
)
u(x, t)
u(x,t) .
综上, 利用傅里叶谱方法数值计算偏微分方程 (组) 步骤如图(一维情况下的傅里叶谱方法计算过程)所示, 具体过程如下:
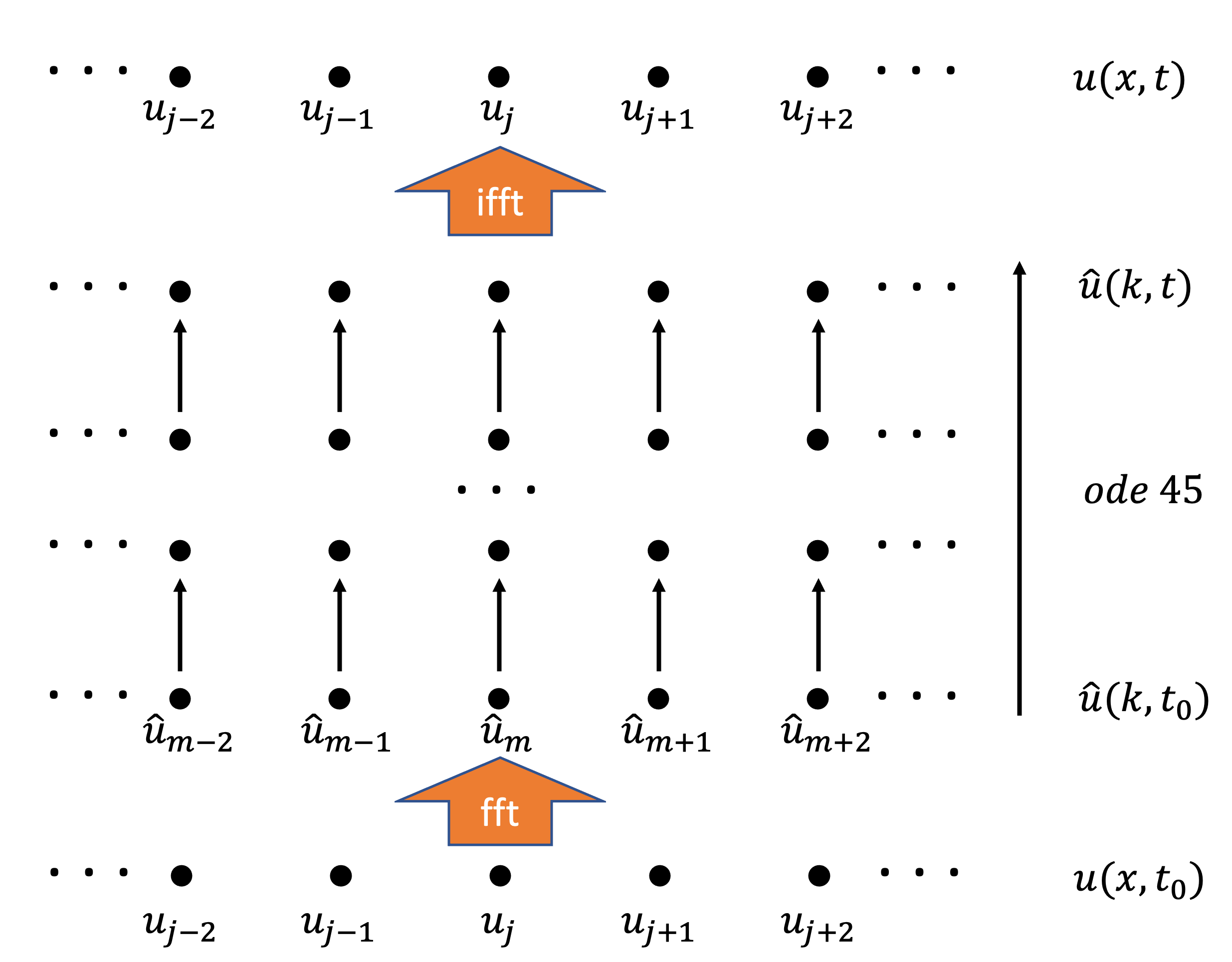
-
对于形如式 % \eqref{3-11} 的偏微分方程 (组), 通过变量代换将其中的 ∂ n u / ∂ t n \partial^n u / \partial t^n ∂nu/∂tn 降为 1 阶 导数, 若 n = 1 n=1 n=1, 略过此步.
-
在 x x x 域上对偏微分方程 (组) 做傅里叶变换, 则线性项中的 ∂ n u / ∂ x n \partial^n u / \partial x^n ∂nu/∂xn 直接变为 ( i k ) n u ^ (\mathrm{i} k)^n \hat{u} (ik)nu^, 并利用 u = F − 1 [ u ^ ] 、 ∂ n u / ∂ x n = F − 1 [ ( i k ) n u ^ ] u=F^{-1}[\hat{u}] 、 \partial^n u / \partial x^n=F^{-1}\left[(\mathrm{i} k)^n \hat{u}\right] u=F−1[u^]、∂nu/∂xn=F−1[(ik)nu^] 代换非线性项中的 u 、 ∂ n u / ∂ x n u 、 \partial^n u / \partial x^n u、∂nu/∂xn, 得到关于 u ^ ( k , t ) \hat{u}(k, t) u^(k,t) 的微分方程 (组).
-
用时间步进法 (如龙格-库塔法等) 数值计算离散化的关于 u ^ ( k , t ) \hat{u}(k, t) u^(k,t) 的微分方程组, 默认边界条件为周期性边界条件, 初始条件 u ^ ( k , t 0 ) = F [ u ( x , t 0 ) ] \hat{u}\left(k, t_0\right)=F\left[u\left(x, t_0\right)\right] u^(k,t0)=F[u(x,t0)] .
-
将上一步得到的结果从频域变换回空域, 即: u ( x , t ) = F − 1 [ u ^ ( k , t ) ] u(x, t)=F^{-1}[\hat{u}(k, t)] u(x,t)=F−1[u^(k,t)] .离散傅里叶变换及逆变换由
fft、ifft函数实现.
傅里叶谱方法求解基本偏微分方程—一维波动方程
对于一根两端固定、没有受到任何外力的弦, 若只研究其中的一段, 在不太长的时间里, 固定端来不及对这段弦产生影响, 则可以认为固定端是不存在的, 弦的长度为无限大。 这种无界
(
−
∞
<
x
<
∞
)
(-\infty<x<\infty)
(−∞<x<∞) 弦的自由振动由式
(
1
)
(1)
(1) 描述。
∂
2
u
∂
t
2
=
a
2
∂
2
u
∂
x
2
\frac{\partial^2 u}{\partial t^2}=a^2 \frac{\partial^2 u}{\partial x^2} % \label{111}
∂t2∂2u=a2∂x2∂2u
如果保证数值计算的区间足够大, 在一定时间内, 弦的振动范围始终没有超出计算区间 (或可以近似地这么认为), 那么就能够放心地使用周期性边界条件。取
a
=
1
a=1
a=1, 初始条件为:
u
∣
t
=
0
=
2
sech
(
x
)
,
∂
u
∂
t
∣
t
=
0
=
0
\left.\quad u\right|_{t=0}=2 \operatorname{sech}(x),\left.\quad \frac{\partial u}{\partial t}\right|_{t=0}=0
u∣t=0=2sech(x),∂t∂u
t=0=0
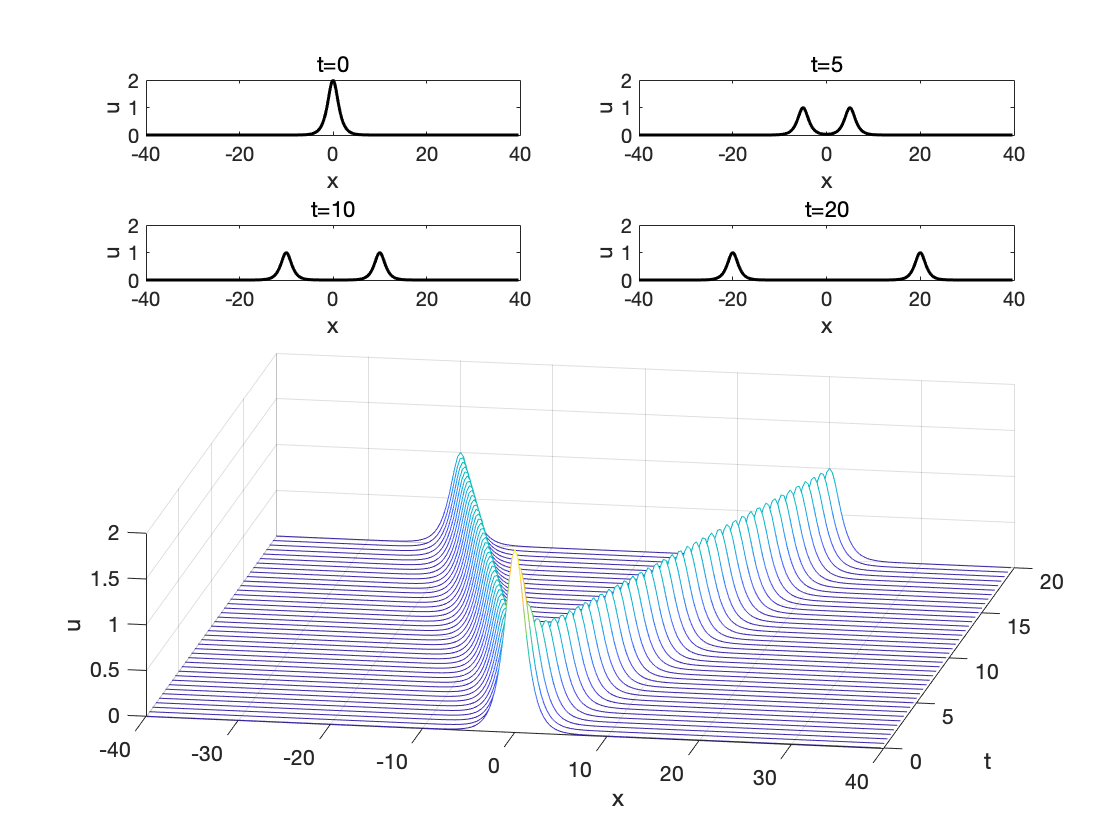
在数学物理方法中, 无界弦的自由振动可由行波法求出解析解, 即达朗贝尔公式。 根据达朗贝尔公式, 从
t
=
0
t=0
t=0 开始, 长度为
L
=
80
L=80
L=80 的
u
u
u 的初始状态
2
sech
(
x
)
2 \operatorname{sech}(x)
2sech(x) 将分裂为两个 sech 形的波, 分别向两边以速度
a
=
1
a=1
a=1 经过
T
=
20
T=20
T=20 秒传播出去, 即正行波和反行波。下面用傅里叶谱方法求解无界弦的自由振动问题, 并与达朗贝尔公式的预测进行比较。首先引入函数
v
v
v 对式
% \eqref{111}
进行降阶:
{
∂
u
∂
t
=
v
∂
v
∂
t
=
a
2
∂
2
u
∂
x
2
\left\{\begin{array}{l} \frac{\partial u}{\partial t}=v \\ \frac{\partial v}{\partial t}=a^2 \frac{\partial^2 u}{\partial x^2} \end{array}\right.
{∂t∂u=v∂t∂v=a2∂x2∂2u
对上式等号两边做傅里叶变换(连续), 化为偏微分方程组:
{
∂
u
^
∂
t
=
v
^
∂
v
^
∂
t
=
−
a
2
k
2
u
^
\left\{\begin{array}{l} \frac{\partial \hat{u}}{\partial t}=\hat{v} \\ \frac{\partial \hat{v}}{\partial t}=-a^2 k^2 \hat{u} \end{array}\right.
{∂t∂u^=v^∂t∂v^=−a2k2u^
注意,以上操作均在连续系统下进行,未做离散近似。
接下来开始构建数值格式,首先,对区间
[
−
L
2
,
L
2
]
[-\frac{L}{2},\frac{L}{2}]
[−2L,2L] 做空间剖分,得到空域信号序列
u
1
,
.
.
.
,
u
j
,
.
.
.
,
u
N
u_1,...,u_j,...,u_N
u1,...,uj,...,uN 在
x
x
x 轴上的坐标间隔是
L
/
N
L/N
L/N , 相应的横坐标
x
x
x 可认为是:
−
L
/
2
,
−
L
/
2
+
L
/
N
,
…
,
L
/
2
−
2
L
/
N
,
L
/
2
−
L
/
N
-L/2,-L/2+L/N,\ldots,L/2-2L/N,L/2-L/N
−L/2,−L/2+L/N,…,L/2−2L/N,L/2−L/N
此时可使用 Matlab 中 fft 函数做离散傅立叶变换,需要注意的是,fft 函数输出的序列
u
^
1
,
.
.
.
,
u
^
k
,
.
.
.
,
u
^
N
\hat{u}_1,...,\hat{u}_k,...,\hat{u}_N
u^1,...,u^k,...,u^N 所对应的频率并不是按照从小到大的顺序排列的,而是非负频率对应于前半部分序列,负频率对应于后半部分序列,即相应的横坐标
k
k
k 可认为是:
0
,
2
π
/
L
,
4
π
/
L
,
…
,
(
N
−
4
)
π
/
L
,
(
N
−
2
)
π
/
L
,
−
N
π
/
L
,
−
(
N
−
2
)
π
/
L
,
…
,
−
4
π
/
L
,
−
2
π
/
L
0,2\pi/L,4\pi/L,\ldots,(N-4)\pi/L,(N-2)\pi/L,-N\pi/L,-(N-2)\pi/L,\ldots,-4\pi/L,-2\pi/L
0,2π/L,4π/L,…,(N−4)π/L,(N−2)π/L,−Nπ/L,−(N−2)π/L,…,−4π/L,−2π/L
因此 Matlab 提供了 fftshift 函数,用于调整 fft 输出序列的顺序。也就是说,fftshift(fft(u)) 所对应的频率才是按照递增顺序排列的:
−
N
π
/
L
,
−
(
N
−
2
)
π
/
L
,
…
,
−
2
π
/
L
,
0
,
2
π
/
L
,
…
,
(
N
−
4
)
π
/
L
,
(
N
−
2
)
π
/
L
-N\pi/L,-(N-2)\pi/L,\ldots,-2\pi/L,0,2\pi/L,\ldots,(N-4)\pi/L,(N-2)\pi/L
−Nπ/L,−(N−2)π/L,…,−2π/L,0,2π/L,…,(N−4)π/L,(N−2)π/L
此外还有 ifftshift 函数用于进行与 fftshift 函数相反的操作。实际上,fftshift 函数的作用仅是让 fft 的输出结果变得更易于观察,若还需要用 ifft 函数将频谱信息还原回空域信号,就必须在使用 fftshift 之后再用 ifftshift 函数将序列的顺序恢复,否则得不到正确结果。如果不是为了分析频谱信息,而此处目的是通过傅里叶谱方法处理微分问题,则大可不必使用 fftshift 和 ifftshift 函数调整序列的顺序,而是在代码中通常使用顺序颠倒的频域坐标,以减少代码冗余、 节约时间。
以求序列 u 的二阶导数数值解为例:ifft((i*k).^2.*fft(u))。其中,变量 k 是由 Matlab 语句 (2*pi/L)*[0:N/2-1 -N/2:-1] 生成的顺序颠倒的频域坐标,这样做是为了免去调用 fftshift 和 ifftshift 的步骤。
这样就可以用 ode45 求解了, 详细代码如下:
主程序代码如下:
clear all; close all;
L=80;N=256;
x=L/N*[-N/2:N/2-1];
k=(2*pi/L)*[0:N/2-1 -N/2:-1].';
% 初始条件
u=2*sech(x);ut=fft(u);
vt=zeros(1,N);uvt=[ut vt];
% 求解
a=1;t=0:0.5:20;
[t,uvtsol]=ode45('wave1D',t,uvt,[],N,k,a);
usol=ifft(uvtsol(:,1:N),[],2);
% 画图
p=[1 11 21 41];
for n=1:4
subplot(5,2,n)
plot(x,usol(p(n),:),'k','LineWidth',1.5),xlabel x,ylabel u
title(['t=' num2str(t(p(n)))]),axis([-L/2 L/2 0 2])
end
subplot(5,2,5:10)
waterfall(x,t,usol),view(10,45)
xlabel x,ylabel t,zlabel u,axis([-L/2 L/2 0 t(end) 0 2])
文件 wave1D.m 代码如下:
function duvt=wave1D(t,uvt,dummy,N,k,a)
ut=uvt(1:N);vt=uvt(N+[1:N]);
duvt=[vt;-a^2*(k).^2.*ut];
end
计算结果如图所示, 初始状态的波形分裂成两半, 并分别向
x
x
x 轴正方向和负方向 以速度
a
a
a 运动, 这和达朗贝尔公式给出的结论是一致的。
傅里叶谱方法求解基本偏微分方程—二维波动方程
将一维波动方程中的一维无界弦自由振动方程推广到二维空间上, 就得到了描述无界
(
−
∞
<
x
,
y
<
∞
)
(-\infty<x, y<\infty)
(−∞<x,y<∞) 弹性薄膜的波动方程:
∂
2
u
∂
t
2
=
a
2
(
∂
2
∂
x
2
+
∂
2
∂
y
2
)
u
\frac{\partial^2 u}{\partial t^2}=a^2\left(\frac{\partial^2}{\partial x^2}+\frac{\partial^2}{\partial y^2}\right) u % \label{222}
∂t2∂2u=a2(∂x2∂2+∂y2∂2)u
取
a
=
1
a=1
a=1, 初始条件为:
u
∣
t
=
0
=
e
−
20
[
(
x
−
0.4
)
2
+
(
y
+
0.4
)
2
]
+
e
−
20
[
(
x
+
0.4
)
2
+
(
y
−
0.4
)
2
]
,
∂
u
∂
t
∣
t
=
0
=
0
\left.u\right|_{t=0}=\mathrm{e}^{-20\left[(x-0.4)^2+(y+0.4)^2\right]}+\mathrm{e}^{-20\left[(x+0.4)^2+(y-0.4)^2\right]},\left.\quad \frac{\partial u}{\partial t}\right|_{t=0}=0
u∣t=0=e−20[(x−0.4)2+(y+0.4)2]+e−20[(x+0.4)2+(y−0.4)2],∂t∂u
t=0=0
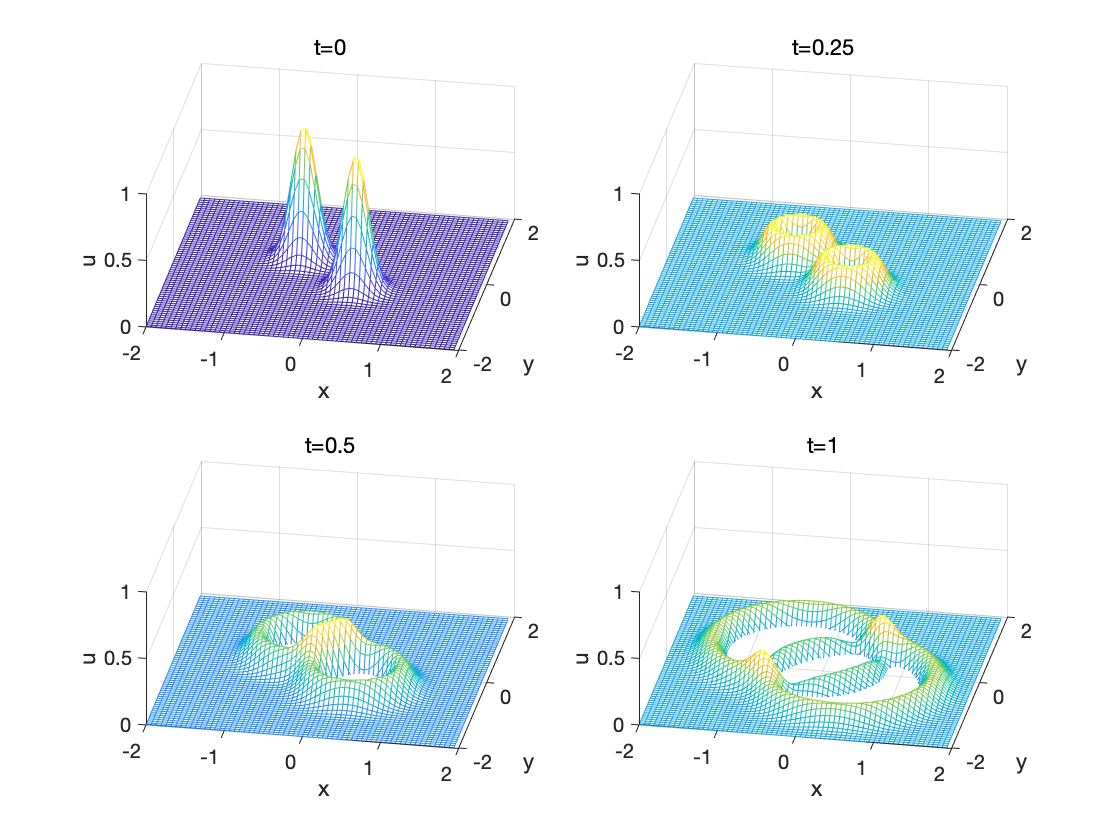
可以这样理解上述初始条件的物理意义: 两手抓住弹性薄膜的两个位置, 分别提起, 使薄膜上形成两个峰, 在
t
=
0
t=0
t=0 时刻突然松手。根据生活常识可以预料到, 这两个位置的薄 膜将来回振动, 与此同时, 产生的波向四周传播, 而且波与波会在相遇处叠加。
为便于求解, 引入函数
v
v
v 对式
% \eqref{222}
进行降阶, 得:
{
∂
u
∂
t
=
v
∂
v
∂
t
=
a
2
(
∂
2
∂
x
2
+
∂
2
∂
y
2
)
u
\left\{\begin{array}{l} \frac{\partial u}{\partial t}=v \\ \frac{\partial v}{\partial t}=a^2\left(\frac{\partial^2}{\partial x^2}+\frac{\partial^2}{\partial y^2}\right) u \end{array}\right.
{∂t∂u=v∂t∂v=a2(∂x2∂2+∂y2∂2)u
对上式等号两边做傅里叶变换, 得到常微分方程组:
{
∂
u
~
^
∂
t
=
v
^
^
∂
v
^
^
∂
t
=
−
a
2
(
k
x
2
+
k
y
2
)
u
^
^
\left\{\begin{array}{l} \frac{\partial \hat{\tilde{u}}}{\partial t}=\hat{\hat{v}} \\ \frac{\partial \hat{\hat{v}}}{\partial t}=-a^2\left(k_x^2+k_y^2\right) \hat{\hat{u}} \end{array}\right.
{∂t∂u~^=v^^∂t∂v^^=−a2(kx2+ky2)u^^
接下来用 ode45 求解即可, 代码如下:
主程序代码如下:
clear all; close all;
L=4;N=64;
x=L/N*[-N/2:N/2-1];y=x;
kx=(2*pi/L)*[0:N/2-1 -N/2:-1];ky=kx;
[X,Y]=meshgrid(x,y);
[kX,kY]=meshgrid(kx,ky);
K2=kX.^2+kY.^2;
% 初始条件
u=exp(-20*((X-0.4).^2+(Y+0.4).^2))+exp(-20*((X+0.4).^2+(Y-0.4).^2));
ut=fft2(u);vt=zeros(N);uvt=[ut(:); vt(:)];
% 求解
a=1;t=[0 0.25 0.5 1];
[t,uvtsol]=ode45('wave2D',t,uvt,[],N,K2(:),a);
% 画图
for n=1:4
subplot(2,2,n)
mesh(x,y,ifft2(reshape(uvtsol(n,1:N^2),N,N))),view(10,45)
title(['t=' num2str(t(n))]),axis([-L/2 L/2 -L/2 L/2 0 1])
xlabel x,ylabel y,xlabel x,zlabel u
end
文件 wave2D.m 代码如下:
function duvt=wave2D(t,uvt,dummy,N,K2,a)
ut=uvt(1:N^2);vt=uvt(N^2+[1:N^2]);
duvt=[vt;-a^2*K2.*ut];
end
程序输出结果如图所示, 它反映了弹性薄膜上的波向四周传播的过程。