1、前言
- 本文是以RISC-V架构为例进行讲解,在汇编代码层面和ARM架构不一样,但是整体框架是一样的
- 侧重任务调度底层机制讲解,讲解代码只保留了基本功能,可配置的功能基本都已经删除
- 本文是以可抢占式调度机制进行讲解
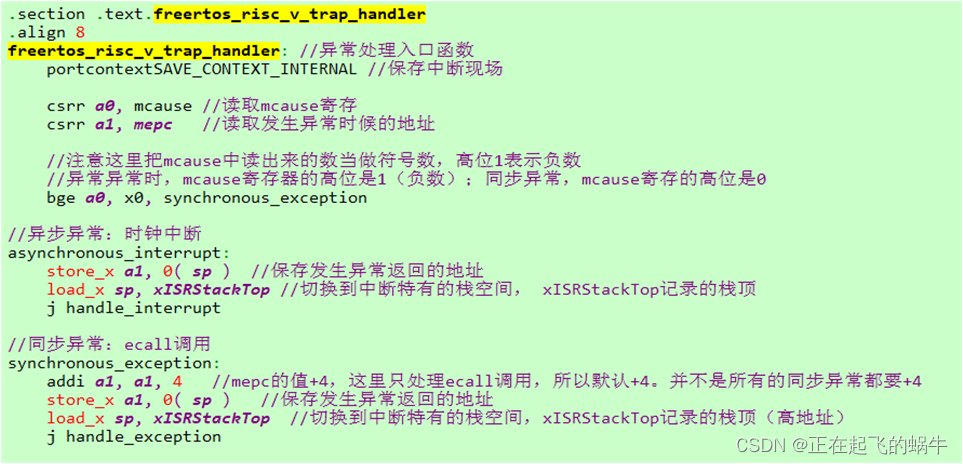
- RISC-V架构只支持M模式,并且中断只处理时间中断和ecall调用,其余异常没有相应的处理代码
- 想要更好理解任务调度机制,最好先去了解freertos的链表,因为任务切换涉及链表操作
2、任务状态切换
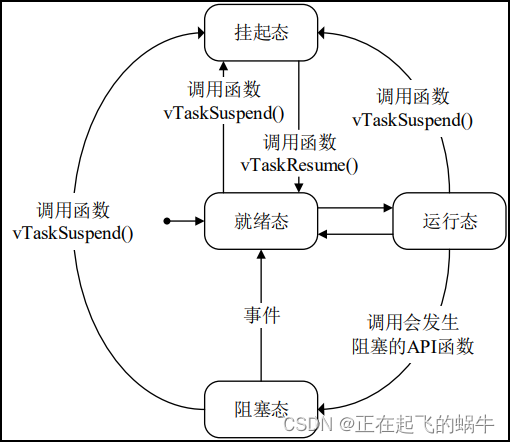
- 任务创建好后处于就绪态
- 每次任务调度时,在就绪态任务中,选择最高优先级的任务执行
- 任务因为等待某个事件、休眠而变成阻塞态
- 休眠时间到、等待的时间发生,会从阻塞态变为就绪态
- 任务执行vTaskSuspend()函数进入挂起态,必须由其他任务调用vTaskResume()唤醒进入就绪态
3、任务控制块TCB
typedef struct tskTaskControlBlock
{
//记录任务栈空间中的栈顶,切换任务时,从这里开始获取/保存任务运行现场。必须是任务控制块的第一个元素,这个任务切换有关
volatile StackType_t * pxTopOfStack;
ListItem_t xStateListItem; //用来把任务控制块挂接到不同状态的任务链表中,比如:就绪链表、挂起链表、 阻塞链表
ListItem_t xEventListItem; //当任务因为等待某个时间事件而阻塞时,将任务控制块挂接到对于事件的阻塞链表,事件发生时,会唤醒对应链表
UBaseType_t uxPriority; //优先级
StackType_t * pxStack; //任务的栈空间,这里记录的是栈空间的最低地址
char pcTaskName[ configMAX_TASK_NAME_LEN ]; //任务的名字
} tskTCB;
4、任务的创建
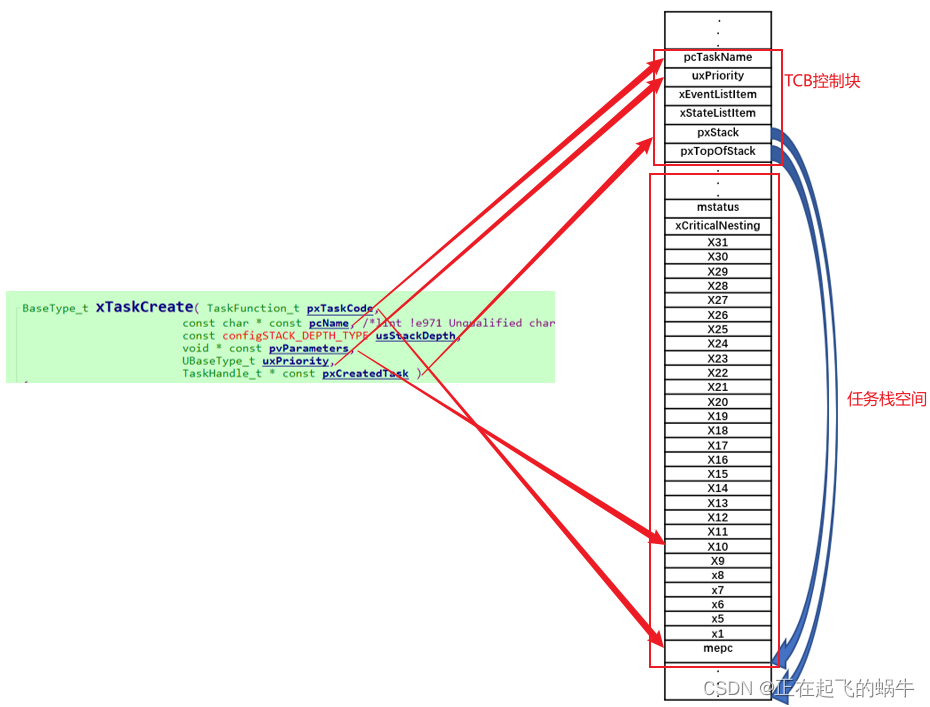
4.1、任务创建函数的参数分析

- pxTaskCode:任务函数的地址
- pcName:任务的名字
- usStackDepth:任务的栈大小,这里的单位是字而不是字节
- pvParameters:任务函数的传参
- uxPriority:任务的优先级
- pxCreatedTask:返回的任务句柄,也就是构建的TCB结构体
4.2、任务创建函数分析
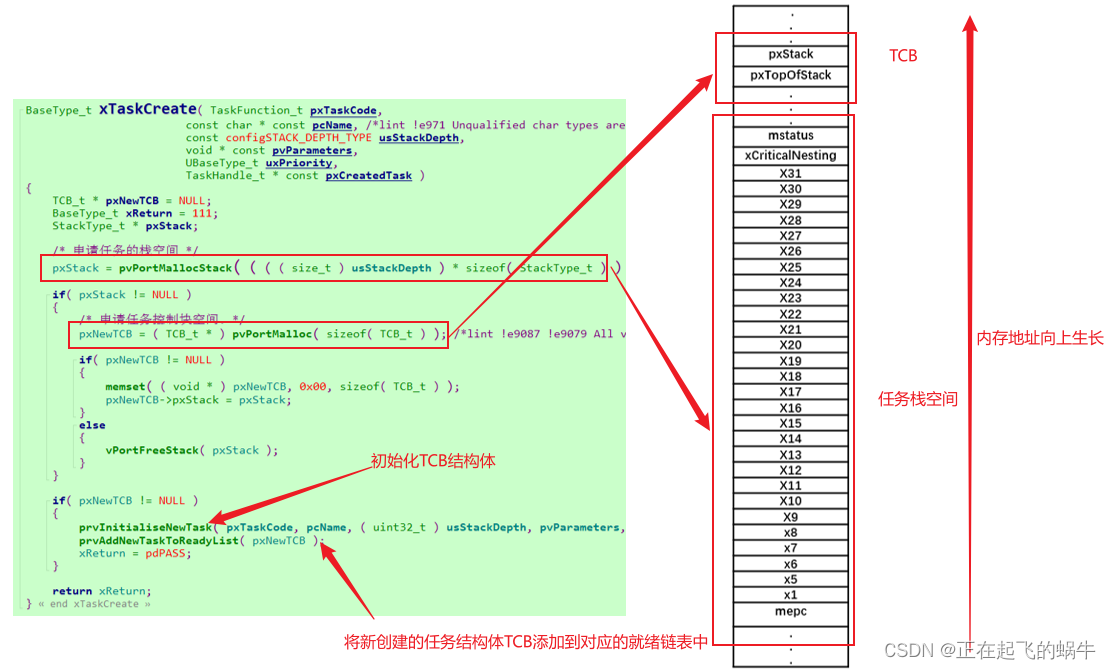
- prvInitialiseNewTask函数:
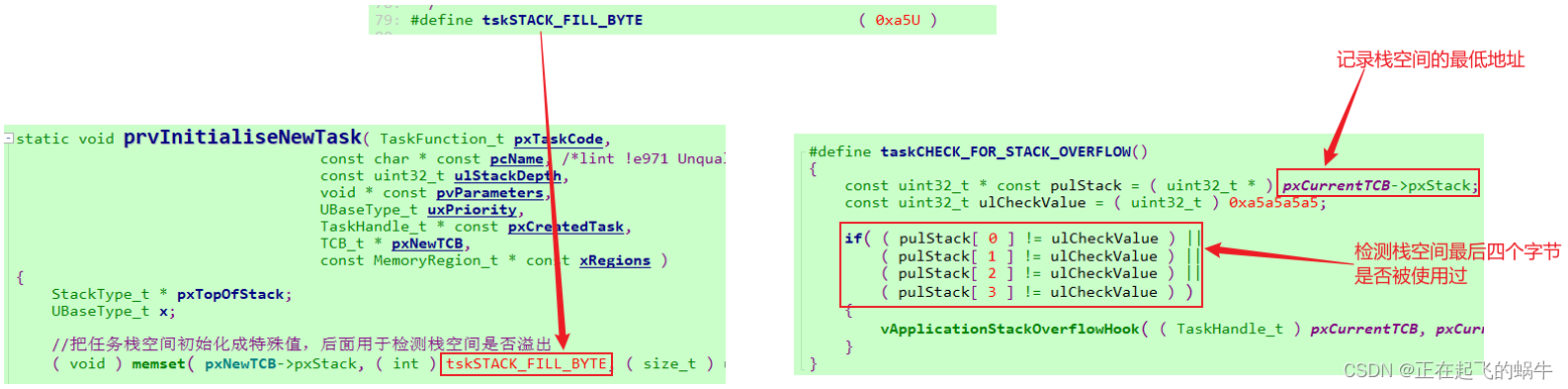
- 初始化栈空间,将栈空间内容初始化成特殊值
- 保存任务名字到pcTaskName变量
- 保存任务优先级到uxPriority变量
- 初始化链表,包括状态链表和事件链表
- 初始化任务上下文(pxPortInitialiseStack函数)
- prvAddNewTaskToReadyList函数:
- 如果是创建的第一个任务,要初始化任务调度相关链表
- 判断当前创建的链表是不是比已经存在的链表优先级更高,如果更高,则把下次调度的任务改为本任务
- 按优先级把TCB挂载到对应的就绪链表
4.3、任务创建参数保存在何处?
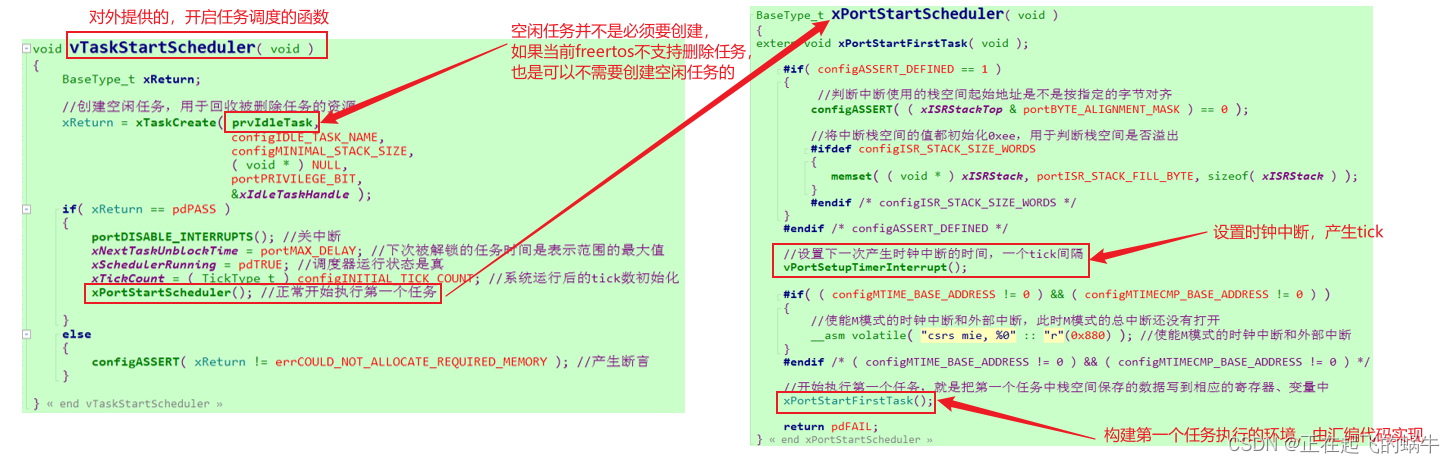
5、开启任务调度器
6、任务切换上下文
6.1、切换任务的时机
- 发生任务切换有两种情况:
- 任务的时间片耗尽
- 每隔tick时间就会产生一次时钟中断,中断里要判断下一次切换哪个任务
- 中断里需要设置MTIMECMP寄存器,周期性产生tick
- 任务主动发起调度,让出CPU
- 任务不需要继续执行时,可主动发起任务调度
- 主动发起任务调度,在底层通过ecall指令实现
- 任务的时间片耗尽
6.2、保存/恢复任务上下文
- 参考博客:《freertos任务切换的现场保存、恢复(任务栈空间)深度分析(以RISC-V架构为例)》;
- 参考博客:《freeRTOS异常处理函数分析(以RISC-V架构进行分析)》;
6.3、xTaskIncrementTick( )函数分析
BaseType_t xTaskIncrementTick( void )
{
TCB_t * pxTCB;
TickType_t xItemValue;
BaseType_t xSwitchRequired = pdFALSE;
//判断调度器是否被挂起,等于pdFALSE表示没有被挂起
if( uxSchedulerSuspended == ( UBaseType_t ) pdFALSE )
{
//系统启动以来产生的tick数+1
const TickType_t xConstTickCount = xTickCount + ( TickType_t ) 1;
//更改系统的tick数,如果溢出则等于0
xTickCount = xConstTickCount;
//xTickCount溢出
if( xConstTickCount == ( TickType_t ) 0U ) /*lint !e774 'if' does not always evaluate to false as it is looking for an overflow. */
{
//把两个延时链表翻转
taskSWITCH_DELAYED_LISTS();
}
//如果现在的tick数大于任务解除阻塞的时间,则进入循环
//xNextTaskUnblockTime记录的是当前被阻塞的任务里,时间最短的阻塞时间
if( xConstTickCount >= xNextTaskUnblockTime )
{
for( ; ; )
{
if( listLIST_IS_EMPTY( pxDelayedTaskList ) != pdFALSE )
{
xNextTaskUnblockTime = portMAX_DELAY; /*lint !e961 MISRA exception as the casts are only redundant for some ports. */
break;
}
else
{
//获取延迟任务列表头部的任务控制块
pxTCB = listGET_OWNER_OF_HEAD_ENTRY( pxDelayedTaskList ); /*lint !e9079 void * is used as this macro is used with timers and co-routines too. Alignment is known to be fine as the type of the pointer stored and retrieved is the same. */
//获取延迟时间
xItemValue = listGET_LIST_ITEM_VALUE( &( pxTCB->xStateListItem ) );
//说明还没有到任务解除阻塞的时间
if( xConstTickCount < xItemValue )
{
//更新最近要被解除阻塞的时间
xNextTaskUnblockTime = xItemValue;
break;
}
//从阻塞链表中移除
listREMOVE_ITEM( &( pxTCB->xStateListItem ) );
//从事件阻塞链表中移除
if( listLIST_ITEM_CONTAINER( &( pxTCB->xEventListItem ) ) != NULL )
{
listREMOVE_ITEM( &( pxTCB->xEventListItem ) );
}
//添加到就绪队列
prvAddTaskToReadyList( pxTCB );
//如果是抢占式调度,则判断解除阻塞的任务优先级是否高于当前正在执行的任务
//如果比当前执行的任务优先级高,则需要切换任务
#if ( configUSE_PREEMPTION == 1 )
{
if( pxTCB->uxPriority > pxCurrentTCB->uxPriority )
{
xSwitchRequired = pdTRUE;
}
}
#endif /* configUSE_PREEMPTION */
}
}
}
//如果是抢占式调度,并且是时间片轮转,当前正在执行的任务的优先级就绪链表中成员个数大于1,
//需要调度,因为同优先级的任务要轮流执行
#if ( ( configUSE_PREEMPTION == 1 ) && ( configUSE_TIME_SLICING == 1 ) )
{
if( listCURRENT_LIST_LENGTH( &( pxReadyTasksLists[ pxCurrentTCB->uxPriority ] ) ) > ( UBaseType_t ) 1 )
{
xSwitchRequired = pdTRUE;
}
}
#endif /* ( ( configUSE_PREEMPTION == 1 ) && ( configUSE_TIME_SLICING == 1 ) ) */
//如果是抢占式调度,并且调度功能没有被挂起,则要切换任务
#if ( configUSE_PREEMPTION == 1 )
{
if( xYieldPending != pdFALSE )
{
xSwitchRequired = pdTRUE;
}
}
#endif /* configUSE_PREEMPTION */
}
else
{
++xPendedTicks;
}
return xSwitchRequired;
}
6.4、vTaskSwitchContext( )函数分析
void vTaskSwitchContext( void )
{
//不为零,则调度器被挂起
if( uxSchedulerSuspended != ( UBaseType_t ) pdFALSE )
{
//调度器被挂起,不允许任务切换
xYieldPending = pdTRUE;
}
else
{
xYieldPending = pdFALSE;
//检查任务的栈是否溢出
taskCHECK_FOR_STACK_OVERFLOW();
//从就绪链表中选择出最高优先级的任务
taskSELECT_HIGHEST_PRIORITY_TASK();
}
}
7、任务优先级的实现
7.1、重要的链表介绍
//就绪链表,configMAX_PRIORITIES是定义的当前支持最大的优先级,数字越大优先级越高
//就绪链表有多个,每个优先级有一个就绪链表
PRIVILEGED_DATA static List_t pxReadyTasksLists[ configMAX_PRIORITIES ];
//两个都是挂起休眠任务的,之所以有两个是为了解决tickCount超过表示范围产生翻转
PRIVILEGED_DATA static List_t xDelayedTaskList1;
PRIVILEGED_DATA static List_t xDelayedTaskList2;
//这是两个链表指针,用于指向上面的两个休眠链表
PRIVILEGED_DATA static List_t * volatile pxDelayedTaskList;
PRIVILEGED_DATA static List_t * volatile pxOverflowDelayedTaskList;
//任务调度器挂起期间解除阻塞条件得到满足的阻塞任务,在任务调度器恢复工作后,
//这些任务会被移动到就绪链表组中,变为就绪状态。
PRIVILEGED_DATA static List_t xPendingReadyList;
//这个保存被删除的任务,等待空闲链表去回收资源
static List_t xTasksWaitingTermination;
//这是任务调度器开启时被挂起的任务
static List_t xSuspendedTaskList; /*< Tasks that are currently suspended. */
- xDelayedTaskList1和xDelayedTaskList2:
- 两个链表都是用来保存被阻塞的任务,定义两个链表是解决xTickCount溢出问题
- xTickCount是记录开启任务调度后,发生tick的次数,在32位系统里是int类型,过一段时间xTickCount就可能溢出。溢出是指:当xTickCount=0xFFFFFFFF时,再加一,xTickCount的值就会变成0
- 疑问:为什么不直接在32位CPU中用long long类型变量来定义xTickCount,这样就不用考虑溢出问题?
- 任务控制块(TCB:Task COntrol Bloc)中xStateListItem和xEventListItem变量就是用来挂接到上面的各个链表中
- 想理解TCB是如何挂接到上述的链表,需要理解freertos的链表实现,阅读源码list.c
7.2、根据任务优先级进行调度
- 在创建任务时需要指定优先级,在构建好TCB后挂接到对应优先级的就绪链表中
- 如果任务发生阻塞、挂起,被挂接到阻塞链表、挂起链表,当重新变为就绪态时,还是挂接到对应优先级的就绪链表
- 发生任务调度时,先扫描高优先级的就绪链表,只有高优先级的就绪链表是空才会扫描低优先级的就绪链表
- 选择扫描到的当前最高优先级的就绪态任务进行调度,并且在调度后把该任务插入到本优先级就绪链表的尾部
- 总结:
- 选择就绪态中最高优先级的任务进行调度
- 同优先级的就绪态任务轮流执行
7.3、从就绪链表中选择出最高优先级的就绪任务
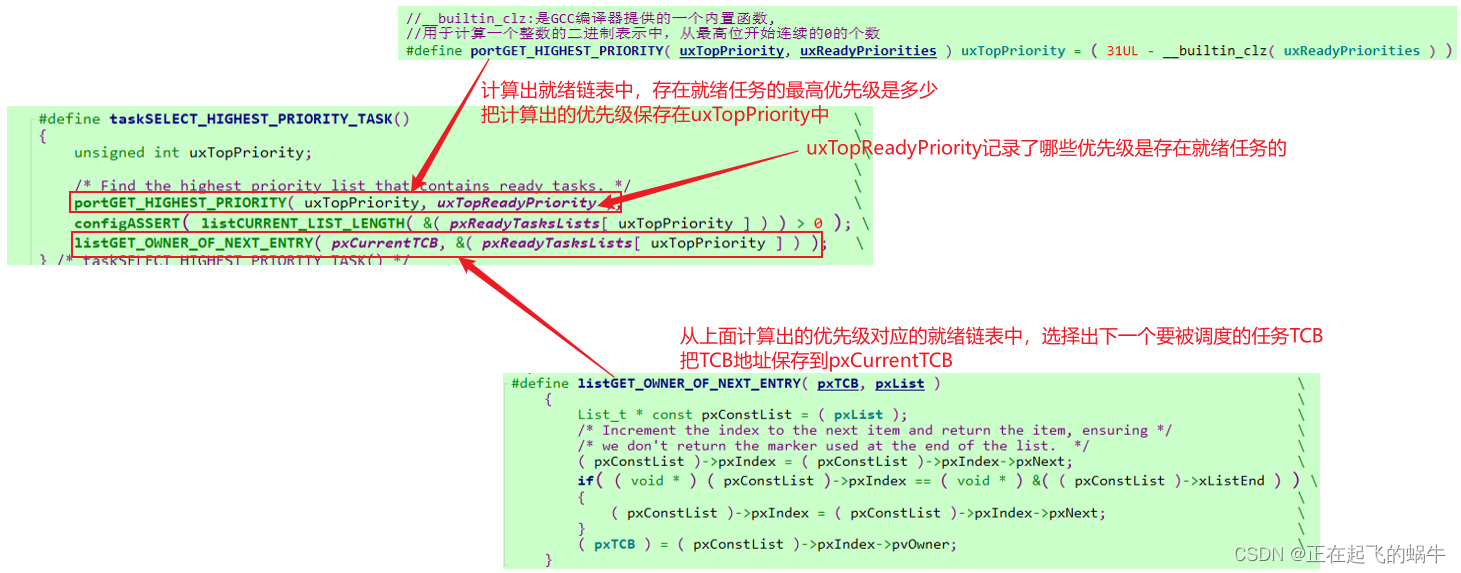
- uxTopReadyPriority变量:
- uxTopReadyPriority是采用位图的形式来保存优先级,每个bit位表示一个优先级
- 比如:当前有优先级是5的任务进入就绪态,则会把uxTopReadyPriority的bit5置一,即uxTopReadyPriority |= (1 << 5);
8、tick的产生
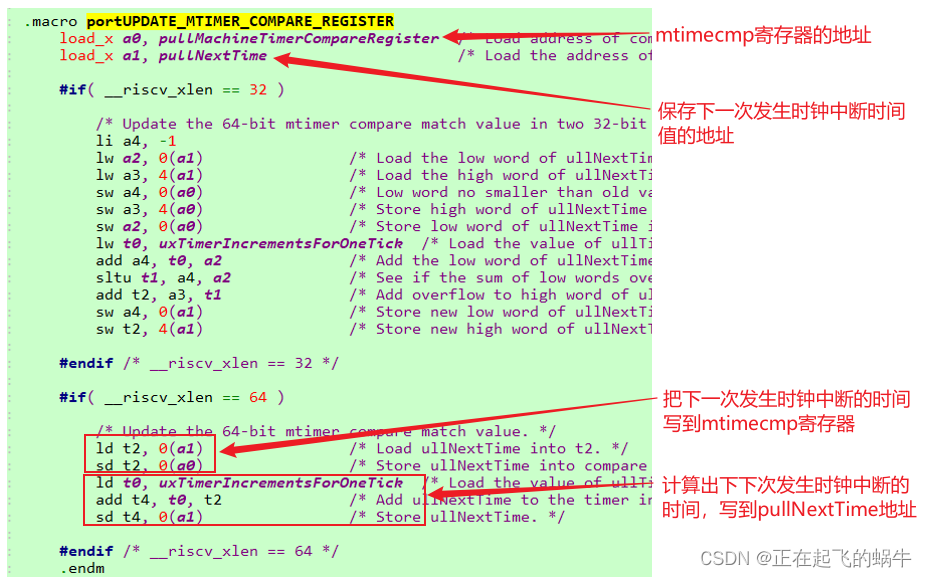
- 使用RISC-V架构自带的定时器,每1ms产生一次定时器中断
- 周期性设置MTIMECMP、MTIME寄存器
9、栈空间溢出检测
-
在构建TCB时,根据创建参数申请栈空间大小
-
在任务切换时,检查栈空间是否溢出
- 在申请栈时,将栈空间整个初始化成特殊值
- 在切换任务时,检查栈空间最低4个字节是不是特殊值(RISC-V使用满减栈)
- 如果不是特殊值,说明栈空间最后四个字节被使用过,此时判断栈溢出
-
如果栈溢出,则扩大栈空间,再次测试是否溢出,选择合适的栈空间
10、 任务的删除过程分析
- 调用vTaskDelet( )函数删除任务:
- 把被删除TCB从挂接的链表中删除
- 判断是否需要更新当前就绪最高优先级,即uxTopReadyPriority变量
- 如果删除的是正在运行的任务:
- 把TCB插入到xTasksWaitingTermination链表
- 如果删除的不是正在运行的任务:
- 判断是否需要更新最近被唤醒任务的时间,即xNextTaskUnblockTime变量
- 释放任务栈空间、TCB空间
- 空闲任务(prvIdleTask)
- 把被删除的任务TCB从xTasksWaitingTermination链表读取出来
- 释放任务栈空间、TCB空间