目录
- 1、管道通信
- 1.1、无名管道
- 1.1、有名管道
- 2、信号处理
- 2.1、信号的种类和发送
- 2.2、信号的接受和处理
1、管道通信
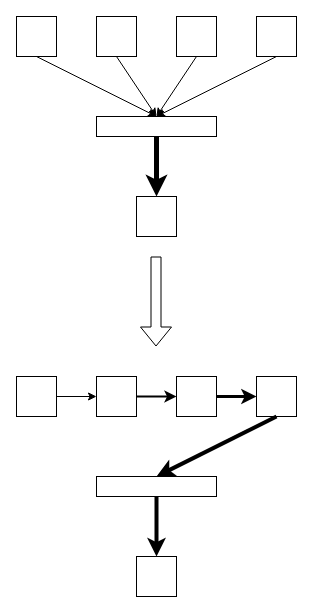
管道通信是一个设备中进程与进程之间通信的一种方式,分为无名管道和有名管道两种。前者只能用于有亲缘关系的进程之间的通信,如父子进程等,后者则没有亲缘限制。此外,管道通信从根本上还是通过内核的一种半双工的通信方式。
1.1、无名管道
无名管道又称匿名管道,即通信双方无需知道对方的pid号,仅通过一些管道提供的描述符便可往管道缓冲区读写数据。在具体使用上,管道应比子进程更先被创建,因为而后被创建的子进程会拷贝父进程的地址空间,从而保证父子进程使用的是同一条管道。当然,管道通信并不限制进程数量。
pipe( )是创建无名管道的一个重要函数,我们可以查看其函数说明:
man 2 pipe

- int pipefd[2]:该数组是用于存放从pipe()取出的管道描述符。其中,pipefd[0]是读取数据的描述符,pipefd[1]是写入数据的描述符。
- int flags:不常用,不说。
- 返回值:成功返回0,反之返回-1。
再看个例子便知道怎么用了:
该例子完成的任务:父进程从终端中读取用户输入的字符并写入管道,然后子进程从管道中读取数据之后将字符一个个打印到终端中来。
注意的点:管道读取是一种阻塞式读取,即如果某一进程想从本没有数据的管道中读取数据,就会一直阻塞在那里,等到有数据进入管道缓冲区。并且这种阻塞只发生在最开始的时候,如果中途管道没有数据了,它还是可以正常读取,只不过返回值是0.
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <sys/wait.h>
int main(int argc, char *argv[])
{
int pipe_fd[2];
char buf;
if(argc != 2)
{
printf("Usage :%s <string>\n", argv[0]);
return -1
}
pipe(pipe_fd); //create a pipe
pid_t cpid = fork(); //create a child process
if(cpid == 0) //enter the child process
{
close(pipe_fd[1]);
while(read(pipe_fd[0], &buf, 1))
write(1, &buf, 1);
printf("\n");
close(pipe_fd[0]);
_exit(0); //recommend to use the _exit() to exit in the child process
}
else //enter the parent process
{
close(pipe_fd[0]);
write(pipe_fd[1], argv[1], strlen(argv[1]));
close(pipe_fd[1]);
wait(NULL); //waiting for his child to exit
exit(0);
}
return 0;
}
1.1、有名管道
有名管道相较于无名管道,可以用于无亲缘关系进程之间的通信。并且它的逻辑也更为清晰,使用的时候,我们可以在文件夹中创造一个管道文件,然后其他进程便可往这个管道文件读写数据,最终实现进程通信的目的。
下面看看具体操作步骤:
第一步,在文件夹中创建一个管道文件(以test_pipe为例)。
mkfifo test_pipe

除了在终端中创建一个FIFO文件夹,我们还可以在程序中创建文件夹。同样是用mkfifo函数,参考
man 3 mkfifo
第二步,创建一个进程往test_pipe写入数据。
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
int main()
{
int fd = open("./test_pipe", O_WRONLY); //open the pipe file
write(fd, "hello", 5); //write something into the file
close(fd); //close the file, don't forget!
return 0;
}
第三步,创建一个新的进程往test_pipe写入数据。
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
int main()
{
int fd = open("./test_pipe", O_WRONLY);
if(fd == -1)
{
printf("an error occured opening the pipe file\n");
return -1;
}
while(1)
{
write(fd, "hello!", 6);
printf("writing successfully!\n");
sleep(1);
}
close(fd);
return 0;
}
第四步,创建一个新的进程从test_pipe读出数据。注意在读取操作的时候要考虑读取延时问题,y因为如果读的速度比写的速度还慢,那可能会读到的不仅仅是这一次写入的数据,还可以能拼接一些上一次的数据。
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <string.h>
int main()
{
int fd = open("./test_pipe", O_RDONLY);
char buf[6];
while(1)
{
//sleep(1);
read(fd, buf, 6);
printf("what i read is: %s\n", buf);
memset(buf, 0 ,sizeof(buf)); //clear the buf
}
close(fd);
return 0;
}
通过以上步骤便可以实现两个没有亲缘关系之间的通信了。但在我学习过程中,还遇到很多问题,这也一一列举出来吧。
第一,有名管道的通信是读写阻塞的,但它阻塞不是阻塞在read和write函数上,而是阻塞在open函数上。这似乎意味着,有名管道的通信始于两个进程同时访问该管道。
第二,当写进程终止之后,读进程还是可以继续运行,只是读出的数据是“空”而已。但如果读进程终止,写进程也会跟着终止。个人感觉问题出现在write函数上,即write函数检测到没有进程读数据,它就会停止,我写了程序验证了一下也大抵如此。
2、信号处理
2.1、信号的种类和发送
kill -l
int kill(pid_t pid, )
2.2、信号的接受和处理
进程信号接受的根本要求肯定是该进程还存在,一般而言保证进程存在有三种方式:
- 采用sleep()函数让进程进入睡眠,但睡眠状态并不是永远的,它有一个输入参数来限制睡眠的时间。比如睡眠三秒:sleep(3);
- 采用pause()函数让进程进入睡眠状态,进入睡眠状态之后,无论你对进程进行任何操作,进程都会退出睡眠状态。
- 利用while循环让进程一直处于运行状态。
在进程存在的前提下便可以考虑进程对于信号的处理方式了,处理方式也是有三种,分别是忽略(SIG_IGN),默认(SIG-DFL)和捕获。而信号的处理一般用signal()函数,下面我们来看看它的函数原型:



![高级搜索-线段树[C/C++]](https://img-blog.csdnimg.cn/19ff19138926460c91cb9361a5ce7257.png)

![(4)BUUCTF-web-[极客大挑战 2019]EasySQL1](https://img-blog.csdnimg.cn/70a2b27224b744fe98b0df3f5152fc69.png)