一、ADC
- ADC(Analog-Digital Converter)模拟-数字转换器
- ADC可以将引脚上连续变化的模拟电压转换为内存中存储的数字变量,建立模拟电路到数字电路的桥梁
- 12位逐次逼近型ADC,1us转换时间
- 输入电压范围:0~3.3V,转换结果范围:0~4095
- 18个输入通道,可测量16个外部和2个内部信号源
- 规则组和注入组两个转换单元
- 模拟看门狗自动监测输入电压范围(有个需求,如果光线或温度高于或低于某个阈值,就会执行一些操作)
- STM32F103C8T6 ADC资源:ADC1、ADC2,10个外部输入通道
1. 逐次逼近型ADC
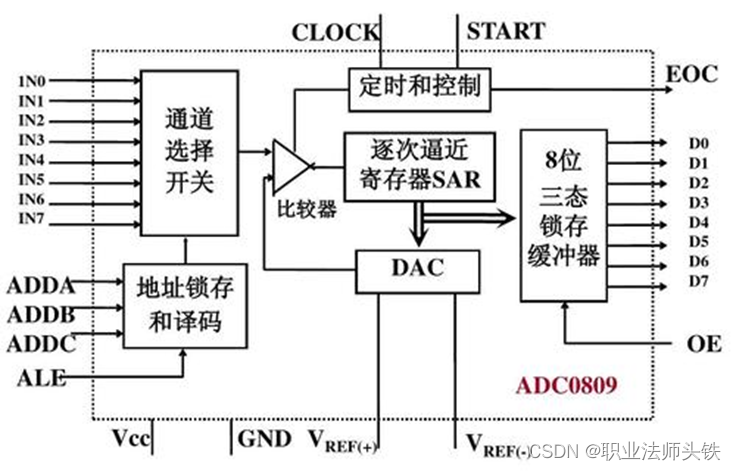
IN0~IN7,通过通道选择开关,选中一路,输入到比较器进行转换和比较。首先是一个电压比较器,它可以判断两个输入信号电压的大小关系,输出一个高低电平指示谁大谁大小。 这个比较器有两个输入端,一个是待测电压,另一个是DAC电压输出端,DAC是数模转换器,给它一个数据,他就能输出数据对应的电压。一个是外部输入端的未知编码电压,一个是DAC输出的已知编码电压,他们同时输入电压比较器,进行大小判断。如果DAC输出的电压比较大,就调小DAC数据,如果DAC输出电压小,就增大DAC数据,直到DAC输出的电压和外部通道输入的电压近似相等,那么DAC输入的数据就是外部电压的编码数据。
2. STM32ADC框图
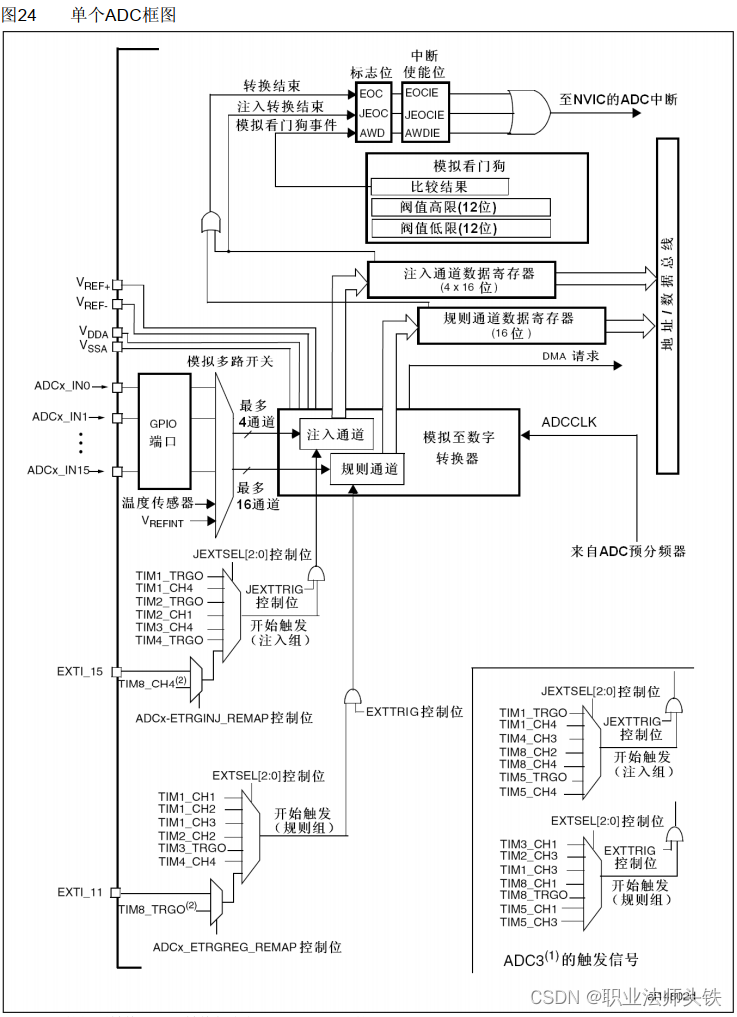
使用规则通道配合DMA就可以不用担心数据被覆盖。
EOC是规则组的完成信号,JEOC是注入组的完成信号,这两个信号都会再状态寄存器里置一个标志位,读取标志位就可以知道是否转换结束。
3. ADC基本结构图

4. 输入通道

5. 转换模式
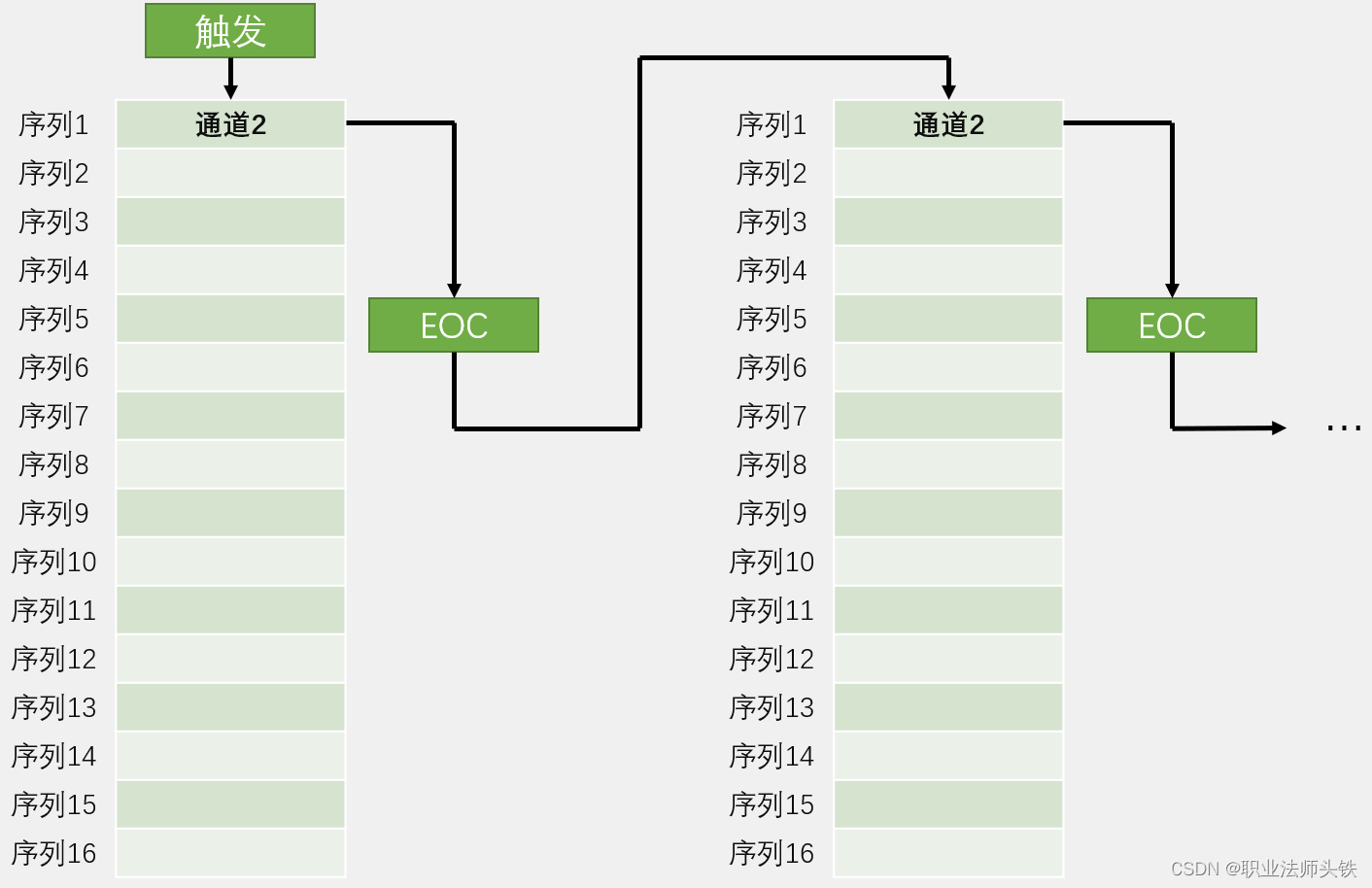
① 单次转换,非扫描模式
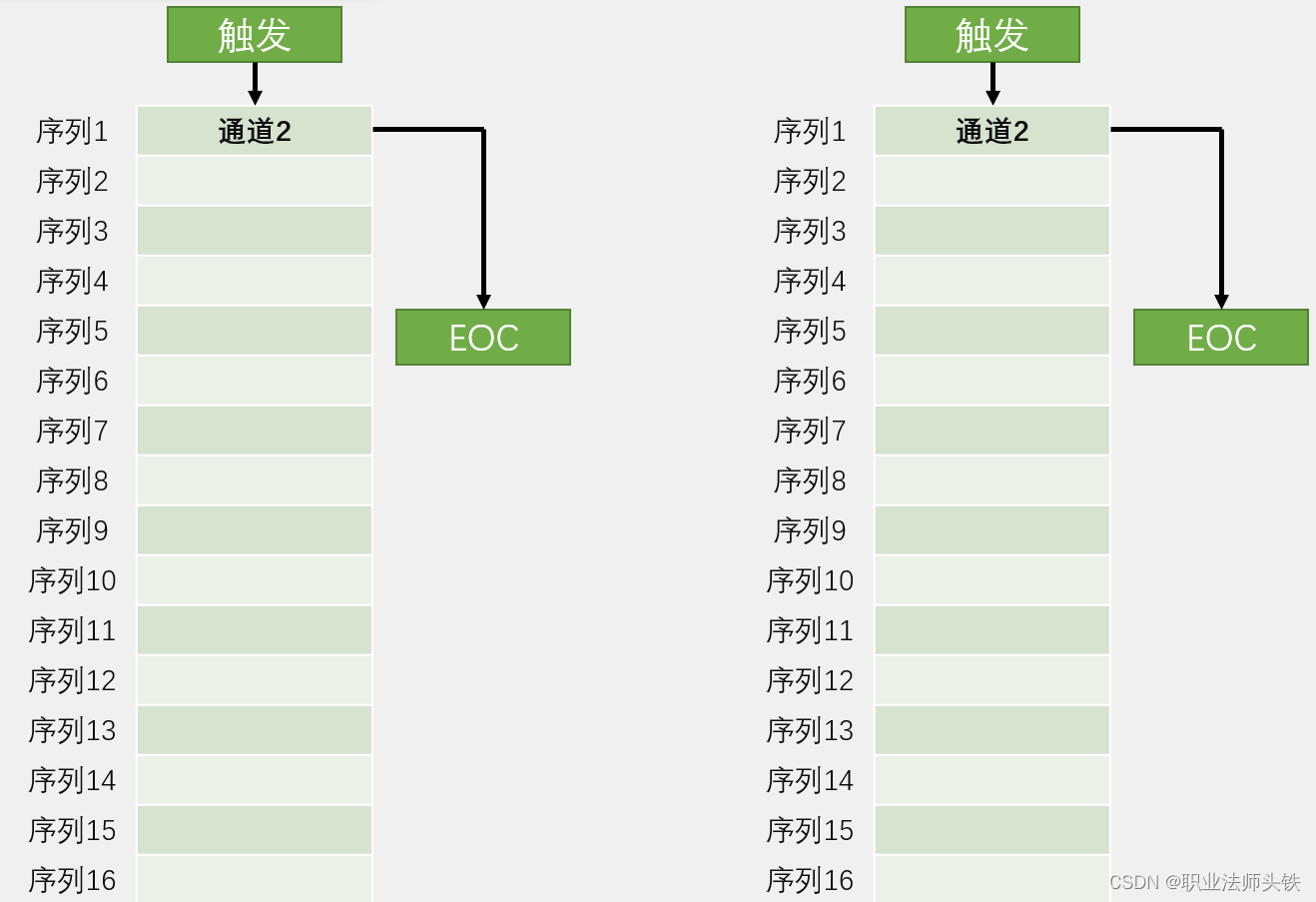
比如序列1为通道2,之后就可以触发转换,ADC对通道2进行模数转换,过一定的时间后,转换完成,转换结果放在数据寄存器里,同时给EOC标志位置1。
② 连续转换,非扫描模式
连续转换与单次转换不同的是,它再一次转换结束后不会停止,而是立刻开始下一轮的转换,之后一直持续下去。
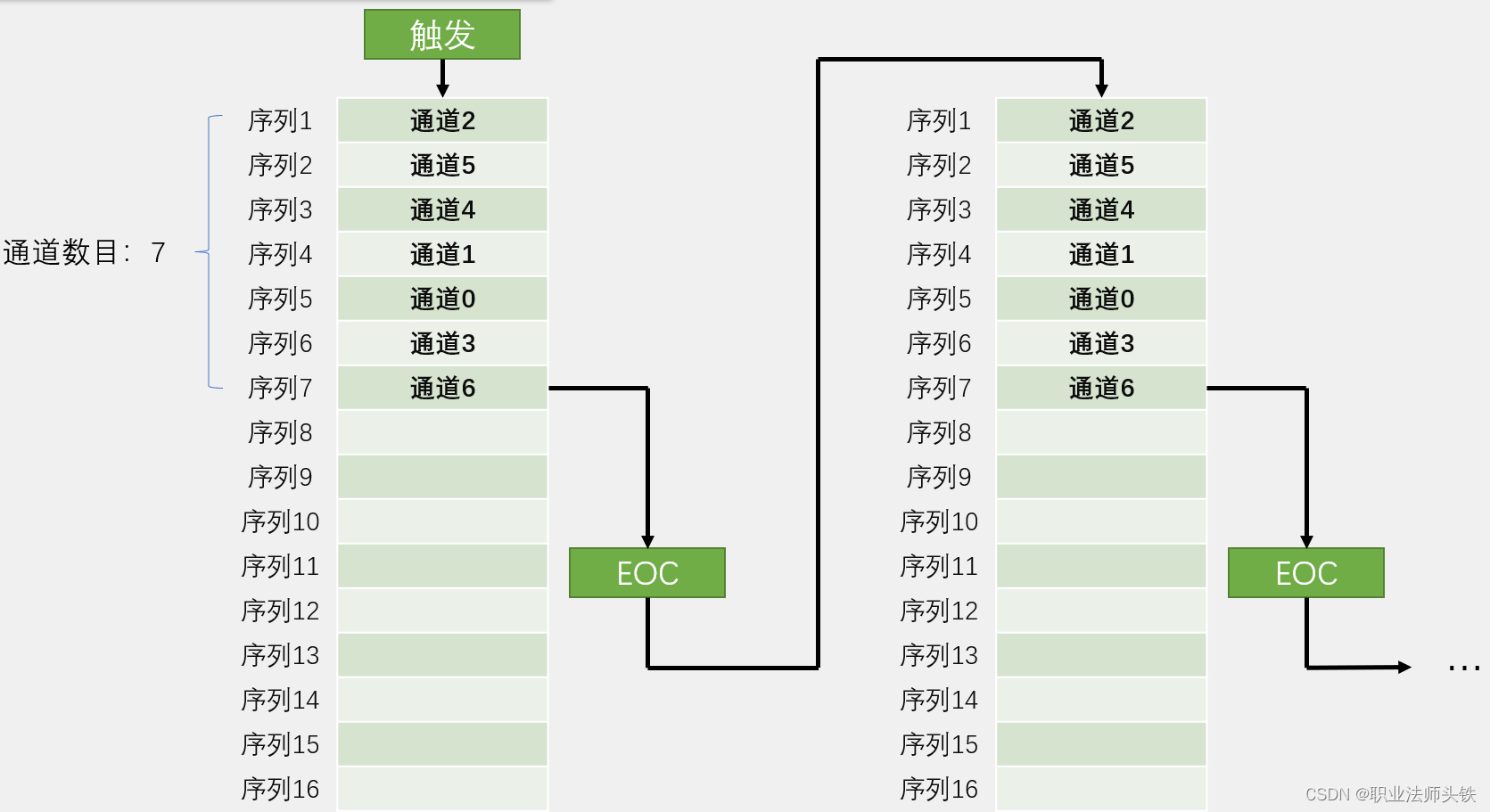
③ 单次转换,扫描模式

单次转换跟上面的单次转换非扫描模式大致一样,但是扫描模式就会用到菜单列表,可以连续对选中的位置进行转换,转换结果都放在数据寄存器里,但为了防止数据被覆盖,需要用到DMA及时把数据挪走,7个通道转换完成之后,产生EOC信号,转换结束。
④ 连续转换,扫描模式
6. 触发控制

7. 数据对齐
① 数据右对齐

② 数据左对齐

12位ADC,但数据寄存器有16位,就分为数据右对齐和左对齐。一般情况下是选择数据右对齐,数据左对齐会让误差变大,因为一位就是要乘2,进4位就是乘16,所以一般不用,除非就用简单的判断,把数据的高8位取出来,舍弃后4位精度。
8. 转换时间
- AD转换的步骤:采样,保持,量化,编码
- STM32 ADC的总转换时间为:TCONV = 采样时间 + 12.5个ADC周期
- 例如:当ADCCLK=14MHz,采样时间为1.5个ADC周期,TCONV = 1.5 + 12.5 = 14个ADC周期 = 1μs
9. 校准
- ADC有一个内置自校准模式。校准可大幅减小因内部电容器组的变化而造成的准精度误差。校准期间,在每个电容器上都会计算出一个误差修正码(数字值),这个码用于消除在随后的转换中每个电容器上产生的误差
- 建议在每次上电后执行一次校准
- 启动校准前, ADC必须处于关电状态超过至少两个ADC时钟周期
10. 硬件电路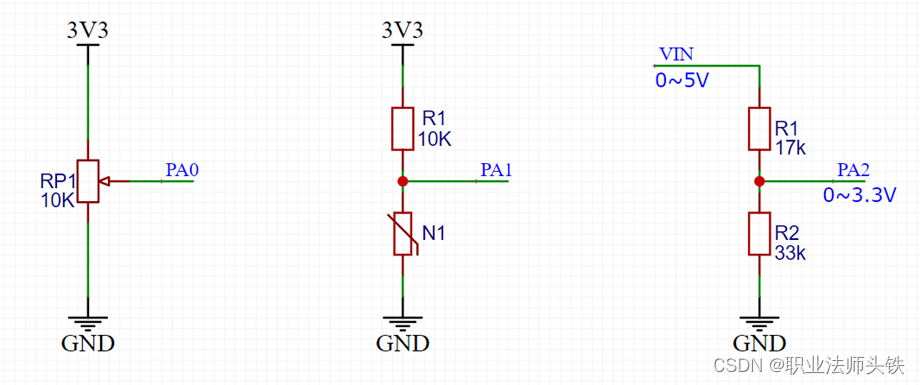
二、代码部分
1. 单通道配置代码
#include "Bsp_ADC.h"
void Bsp_ADC_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE); // 1.时钟配置
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_ADCCLKConfig(RCC_PCLK2_Div6); // 2.ADC分频,ADC最大14M,接近来的时候是72M,所以要分频到14M以下
GPIO_InitTypeDef GPIO_InitStructure; // 3.GPIO配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1, ADC_SampleTime_55Cycles5); // 4.配置规则组
// ADC_RegularChannelConfig(ADC1, ADC_Channel_13, 2, ADC_SampleTime_55Cycles5); // 相当于填充菜单列表方法
ADC_InitTypeDef ADC_InitStructure; // 5.配置ADC
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; // 数据对齐
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; // 外部触发转换选择
//ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; // 连续转换模式
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;
ADC_Init(ADC1, &ADC_InitStructure);
ADC_Cmd(ADC1, ENABLE); // 6.开启ADC
ADC_ResetCalibration(ADC1); // 7.校准ADC
while (ADC_GetResetCalibrationStatus(ADC1) == SET);
ADC_StartCalibration(ADC1);
while (ADC_GetCalibrationStatus(ADC1) == SET);
ADC_SoftwareStartConvCmd(ADC1, ENABLE); // ADC软件启动转换,因为开启了连续转换模式,所以只开启一次即可
// 如果需要看门狗和中断,则需要额外配置(开启看门狗和中断配置)
}
uint16_t ADC_GetValue(void)
{
//ADC_SoftwareStartConvCmd(ADC1, ENABLE); // ADC软件启动转换
//while(ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET); // 等待ADC读取EOC标志位为1; 并且也不需要判断标志位了
return ADC_GetConversionValue(ADC1); // 返回ADC1的值
}2. 多通道配置代码
#include "Bsp_ADC.h"
void Bsp_ADC_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE); // 1.时钟配置
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_ADCCLKConfig(RCC_PCLK2_Div6); // 2.ADC分频,ADC最大14M,接近来的时候是72M,所以要分频到14M以下
GPIO_InitTypeDef GPIO_InitStructure; // 3.GPIO配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1, ADC_SampleTime_55Cycles5); // 4.配置规则组
// ADC_RegularChannelConfig(ADC1, ADC_Channel_13, 2, ADC_SampleTime_55Cycles5); // 相当于填充菜单列表方法
ADC_InitTypeDef ADC_InitStructure; // 5.配置ADC
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; // 数据对齐
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; // 外部触发转换选择
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; // 连续转换模式
// ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;
ADC_Init(ADC1, &ADC_InitStructure);
ADC_Cmd(ADC1, ENABLE); // 6.开启ADC
ADC_ResetCalibration(ADC1); // 7.校准ADC
while (ADC_GetResetCalibrationStatus(ADC1) == SET);
ADC_StartCalibration(ADC1);
while (ADC_GetCalibrationStatus(ADC1) == SET);
// ADC_SoftwareStartConvCmd(ADC1, ENABLE); // ADC软件启动转换,因为开启了连续转换模式,所以只开启一次即可
// 如果需要看门狗和中断,则需要额外配置(开启看门狗和中断配置)
}
/* 读取ADC的每个通道,在主程序里读取4次即可完成多通道 */
uint16_t ADC_GetValue(uint8_t ADC_Channel)
{
ADC_SoftwareStartConvCmd(ADC1, ENABLE); // ADC软件启动转换
while(ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET); // 等待ADC读取EOC标志位为1; 并且也不需要判断标志位了
ADC_RegularChannelConfig(ADC1, ADC_Channel, 1, ADC_SampleTime_55Cycles5);
return ADC_GetConversionValue(ADC1); // 返回ADC1的值
}