目录
直流有刷电机多环控制实现
硬件设计
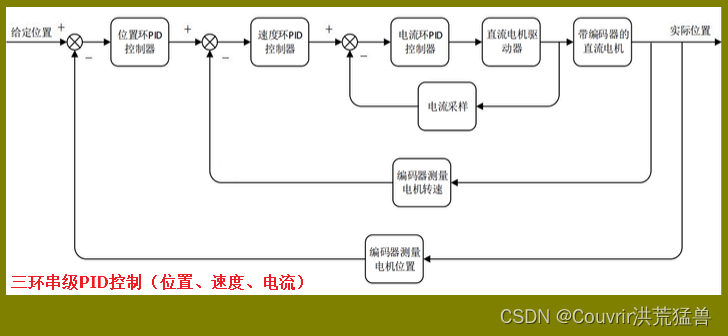
直流电机三环(速度环、电流环、位置环)串级PID控制-位置式PID
编程要点
配置ADC可读取电流值
配置基本定时器6产生定时中断读取当前电路中驱动电机的电流值并执行PID运算
配置定时器1输出PWM控制电机
配置定时器3读取编码器的计数值
ADC数据处理
编写位置式PID算法
直流有刷电机多环控制实现
外环的输出会作为内环的输入。外环一般是最终要控制的效果,
硬件设计
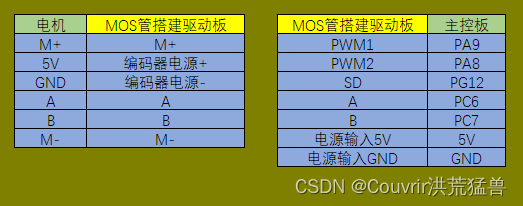
可选:L298N电机驱动板、野火MOS搭建的驱动板。

直流电机三环(速度环、电流环、位置环)串级PID控制-位置式PID
编程要点
配置ADC可读取电流值。
配置基本定时器TIM6产生定时中断执行PID运算。
配置高级定时器TIM1输出PWM控制电机。
配置通用定时器TIM3读取编码器的计数值。
ADC数据处理。
编写位置式PID算法。
编写位置环、速度环、电流环控制函数。
增加上位机曲线观察相关代码。
编写按键控制代码。
配置ADC可读取电流值
#define VBUS_MAX 14 // 电压最大值
#define VBUS_MIN 10 // 电压最小值
#define VBUS_HEX_MAX ((VBUS_MAX/37.0+1.24)/VREF*65536) // 电压最大值(测量电压是电源电压的1/37)
#define VBUS_HEX_MIN ((VBUS_MIN/37.0+1.24)/VREF*65536) // 电压最小值(测量电压是电源电压的1/37)
__IO uint16_t ADC_ConvertedValue;
DMA_HandleTypeDef DMA_Init_Handle;
ADC_HandleTypeDef ADC_Handle;
static uint16_t adc_buff[1024];
static uint16_t vbus_adc_mean = 0; // 电源电压 ADC 采样结果平均值
static uint32_t adc_mean_sum = 0; // 平均值累加
static uint32_t adc_mean_count = 0; // 累加计数
/**
* @brief 电流采集初始化
* @param 无
* @retval 无
*/
void ADC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
__GPIOB_CLK_ENABLE();
__DMA2_CLK_ENABLE();
__ADC1_CLK_ENABLE();
// PB1--电流
GPIO_InitStructure.Pin = GPIO_PIN_1;
GPIO_InitStructure.Mode = GPIO_MODE_ANALOG;
GPIO_InitStructure.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStructure);
// PB0--电压
GPIO_InitStructure.Pin = GPIO_PIN_0;
HAL_GPIO_Init(GPIOB, &GPIO_InitStructure);
// ADC1使用DMA2,数据流0,通道0,这个是手册固定死的
DMA_Init_Handle.Instance = DMA2_Stream0;
DMA_Init_Handle.Init.Direction = DMA_PERIPH_TO_MEMORY;
DMA_Init_Handle.Init.PeriphInc = DMA_PINC_DISABLE;
DMA_Init_Handle.Init.MemInc = DMA_MINC_ENABLE;
DMA_Init_Handle.Init.PeriphDataAlignment = DMA_PDATAALIGN_HALFWORD;
DMA_Init_Handle.Init.MemDataAlignment = DMA_MDATAALIGN_HALFWORD;
DMA_Init_Handle.Init.Mode = DMA_CIRCULAR;
DMA_Init_Handle.Init.Priority = DMA_PRIORITY_HIGH;
DMA_Init_Handle.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
DMA_Init_Handle.Init.FIFOThreshold = DMA_FIFO_THRESHOLD_HALFFULL;
DMA_Init_Handle.Init.MemBurst = DMA_MBURST_SINGLE;
DMA_Init_Handle.Init.PeriphBurst = DMA_PBURST_SINGLE;
// 选择 DMA 通道,通道存在于流中
DMA_Init_Handle.Init.Channel = DMA_CHANNEL_0;
//初始化DMA流,流相当于一个大的管道,管道里面有很多通道
HAL_DMA_Init(&DMA_Init_Handle);
__HAL_LINKDMA(&ADC_Handle, DMA_Handle, DMA_Init_Handle);
ADC_Handle.Instance = ADC1;
ADC_Handle.Init.ClockPrescaler = ADC_CLOCKPRESCALER_PCLK_DIV4;
ADC_Handle.Init.Resolution = ADC_RESOLUTION_12B;
ADC_Handle.Init.ScanConvMode = ENABLE;
ADC_Handle.Init.ContinuousConvMode = ENABLE;
ADC_Handle.Init.DiscontinuousConvMode = DISABLE;
ADC_Handle.Init.NbrOfDiscConversion = 0;
ADC_Handle.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
ADC_Handle.Init.ExternalTrigConv = ADC_SOFTWARE_START;
ADC_Handle.Init.DataAlign = ADC_DATAALIGN_LEFT;
ADC_Handle.Init.NbrOfConversion = 2;
ADC_Handle.Init.DMAContinuousRequests = ENABLE;
ADC_Handle.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
HAL_ADC_Init(&ADC_Handle);
ADC_ChannelConfTypeDef ADC_Config;
ADC_Config.Channel = ADC_CHANNEL_9;
ADC_Config.Rank = 1;
ADC_Config.SamplingTime = ADC_SAMPLETIME_3CYCLES;
ADC_Config.Offset = 0;
HAL_ADC_ConfigChannel(&ADC_Handle, &ADC_Config);
/** Configure the analog watchdog
*/
ADC_AnalogWDGConfTypeDef AnalogWDGConfig = {0};
AnalogWDGConfig.WatchdogMode = ADC_ANALOGWATCHDOG_SINGLE_REG;
AnalogWDGConfig.HighThreshold = VBUS_HEX_MAX;
AnalogWDGConfig.LowThreshold = VBUS_HEX_MIN;
AnalogWDGConfig.Channel = ADC_CHANNEL_8;
AnalogWDGConfig.ITMode = ENABLE;
if (HAL_ADC_AnalogWDGConfig(&ADC_Handle, &AnalogWDGConfig) != HAL_OK)
{
while (1);
}
/** Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
*/
ADC_Config.Channel = ADC_CHANNEL_8;
ADC_Config.Rank = 2;
ADC_Config.SamplingTime = ADC_SAMPLETIME_3CYCLES;
ADC_Config.Offset = 0;
if (HAL_ADC_ConfigChannel(&ADC_Handle, &ADC_Config) != HAL_OK)
{
while (1);
}
// 外设中断优先级配置和使能中断配置
HAL_NVIC_SetPriority(DMA2_Stream0_IRQn, 4, 0);
HAL_NVIC_EnableIRQ(DMA2_Stream0_IRQn);
HAL_NVIC_SetPriority(ADC_IRQn, 3, 0);
HAL_NVIC_EnableIRQ(ADC_IRQn);
HAL_ADC_Start_DMA(&ADC_Handle, (uint32_t *)&adc_buff, 1024);
}配置基本定时器6产生定时中断读取当前电路中驱动电机的电流值并执行PID运算
TIM_HandleTypeDef TIM_TimeBaseStructure;
/**
* @brief 初始化基本定时器定时,默认50ms产生一次中断
* @param 无
* @retval 无
*/
void TIMx_Configuration(void)
{
HAL_NVIC_SetPriority(TIM6_DAC_IRQn, 1, 3);
HAL_NVIC_EnableIRQ(TIM6_DAC_IRQn);
__TIM6_CLK_ENABLE();
TIM_TimeBaseStructure.Instance = TIM6;
TIM_TimeBaseStructure.Init.Period = 50 * 50 - 1;
TIM_TimeBaseStructure.Init.Prescaler = 1680 - 1;
TIM_TimeBaseStructure.Init.CounterMode = TIM_COUNTERMODE_UP;
TIM_TimeBaseStructure.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
HAL_TIM_Base_Init(&TIM_TimeBaseStructure);
// 开启定时器更新中断
HAL_TIM_Base_Start_IT(&TIM_TimeBaseStructure);
uint32_t temp = (__HAL_TIM_GET_AUTORELOAD(&TIM_TimeBaseStructure) + 1) / 50.0; // 计算周期,单位ms
set_computer_value(SEND_PERIOD_CMD, CURVES_CH1, &temp, 1); // 给通道 1 发送目标值
}
/**
* @brief 定时器更新事件回调函数
* @param 无
* @retval 无
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim == (&TIM_TimeBaseStructure))
{
motor_pid_control(); // 每50ms执行一次PID运算
}
}配置定时器1输出PWM控制电机
TIM_HandleTypeDef DCM_TimeBaseStructure;
/**
* @brief 初始化控制通用定时器
* @param 无
* @retval 无
*/
void Motor_TIMx_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
TIM_OC_InitTypeDef TIM_OCInitStructure;
__HAL_RCC_GPIOA_CLK_ENABLE();
__TIM1_CLK_ENABLE();
// PA8--PWM_TIM_CH1
GPIO_InitStruct.Pin = GPIO_PIN_8;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Alternate = PWM_TIM_GPIO_AF;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
// PA9--PWM_TIM_CH2
GPIO_InitStruct.Pin = GPIO_PIN_9;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
// TIM1 66.7us一次周期
DCM_TimeBaseStructure.Instance = TIM1;
DCM_TimeBaseStructure.Init.Period = 5600 - 1;
DCM_TimeBaseStructure.Init.Prescaler = 1 - 1;
DCM_TimeBaseStructure.Init.CounterMode = TIM_COUNTERMODE_UP;
DCM_TimeBaseStructure.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
HAL_TIM_PWM_Init(&DCM_TimeBaseStructure);
/*PWM模式配置*/
TIM_OCInitStructure.OCMode = TIM_OCMODE_PWM1;
TIM_OCInitStructure.Pulse = 0;
TIM_OCInitStructure.OCPolarity = TIM_OCPOLARITY_HIGH;
TIM_OCInitStructure.OCNPolarity = TIM_OCNPOLARITY_HIGH;
TIM_OCInitStructure.OCIdleState = TIM_OCIDLESTATE_SET;
TIM_OCInitStructure.OCNIdleState = TIM_OCNIDLESTATE_RESET;
/*配置PWM通道*/
HAL_TIM_PWM_ConfigChannel(&DCM_TimeBaseStructure, &TIM_OCInitStructure, TIM_CHANNEL_1);
/*开始输出PWM*/
HAL_TIM_PWM_Start(&DCM_TimeBaseStructure, TIM_CHANNEL_1);
/*配置PWM通道*/
HAL_TIM_PWM_ConfigChannel(&DCM_TimeBaseStructure, &TIM_OCInitStructure, TIM_CHANNEL_2);
/*开始输出PWM*/
HAL_TIM_PWM_Start(&DCM_TimeBaseStructure, TIM_CHANNEL_2);
}
/**
* @brief 设置TIM通道的占空比
* @param channel 通道 (1,2,3,4)
* @param compare 占空比
* @note 无
* @retval 无
*/
void TIM1_SetPWM_pulse(uint32_t channel, int compare)
{
switch (channel)
{
case TIM_CHANNEL_1:
__HAL_TIM_SET_COMPARE(&DCM_TimeBaseStructure, TIM_CHANNEL_1, compare);
break;
case TIM_CHANNEL_2:
__HAL_TIM_SET_COMPARE(&DCM_TimeBaseStructure, TIM_CHANNEL_2, compare);
break;
case TIM_CHANNEL_3:
__HAL_TIM_SET_COMPARE(&DCM_TimeBaseStructure, TIM_CHANNEL_3, compare);
break;
case TIM_CHANNEL_4:
__HAL_TIM_SET_COMPARE(&DCM_TimeBaseStructure, TIM_CHANNEL_4, compare);
break;
}
}配置定时器3读取编码器的计数值
TIM_HandleTypeDef DCM_TimeBaseStructure;
/**
* @brief 初始化控制通用定时器
* @param 无
* @retval 无
*/
void Motor_TIMx_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
TIM_OC_InitTypeDef TIM_OCInitStructure;
__HAL_RCC_GPIOA_CLK_ENABLE();
__TIM1_CLK_ENABLE();
// PA8--PWM_TIM_CH1
GPIO_InitStruct.Pin = GPIO_PIN_8;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Alternate = PWM_TIM_GPIO_AF;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
// PA9--PWM_TIM_CH2
GPIO_InitStruct.Pin = GPIO_PIN_9;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
// TIM1 66.7us一次周期
DCM_TimeBaseStructure.Instance = TIM1;
DCM_TimeBaseStructure.Init.Period = 5600 - 1;
DCM_TimeBaseStructure.Init.Prescaler = 1 - 1;
DCM_TimeBaseStructure.Init.CounterMode = TIM_COUNTERMODE_UP;
DCM_TimeBaseStructure.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
HAL_TIM_PWM_Init(&DCM_TimeBaseStructure);
/*PWM模式配置*/
TIM_OCInitStructure.OCMode = TIM_OCMODE_PWM1;
TIM_OCInitStructure.Pulse = 0;
TIM_OCInitStructure.OCPolarity = TIM_OCPOLARITY_HIGH;
TIM_OCInitStructure.OCNPolarity = TIM_OCNPOLARITY_HIGH;
TIM_OCInitStructure.OCIdleState = TIM_OCIDLESTATE_SET;
TIM_OCInitStructure.OCNIdleState = TIM_OCNIDLESTATE_RESET;
/*配置PWM通道*/
HAL_TIM_PWM_ConfigChannel(&DCM_TimeBaseStructure, &TIM_OCInitStructure, TIM_CHANNEL_1);
/*开始输出PWM*/
HAL_TIM_PWM_Start(&DCM_TimeBaseStructure, TIM_CHANNEL_1);
/*配置PWM通道*/
HAL_TIM_PWM_ConfigChannel(&DCM_TimeBaseStructure, &TIM_OCInitStructure, TIM_CHANNEL_2);
/*开始输出PWM*/
HAL_TIM_PWM_Start(&DCM_TimeBaseStructure, TIM_CHANNEL_2);
}
/**
* @brief 定时器更新事件回调函数
* @param 无
* @retval 无
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim == (&TIM_EncoderHandle))
{
/* 判断当前计数器计数方向 */
if (__HAL_TIM_IS_TIM_COUNTING_DOWN(&TIM_EncoderHandle))
/* 下溢 */
{
Encoder_Overflow_Count--;
}
else
/* 上溢 */
{
Encoder_Overflow_Count++;
}
}
}ADC数据处理
static uint16_t flag_num = 0;
/**
* @brief 常规转换在非阻塞模式下完成回调
* @param hadc: ADC 句柄.
* @retval 无
*/
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef *hadc)
{
uint32_t adc_mean = 0;
HAL_ADC_Stop_DMA(hadc); // 停止 ADC 采样,处理完一次数据在继续采样
/* 计算电流通道采样的平均值 */
for (uint32_t count = 0; count < 1024; count += 2)
{
adc_mean += (uint32_t)adc_buff[count];
}
adc_mean_sum += adc_mean / (1024 / 2); // 保存平均值
adc_mean_count++;
adc_mean = 0;
/* 计算电压通道采样的平均值 */
for (uint32_t count = 1; count < 1024; count += 2)
{
adc_mean += (uint32_t)adc_buff[count];
}
vbus_adc_mean = adc_mean / (1024 / 2); // 保存平均值
HAL_ADC_Start_DMA(&ADC_Handle, (uint32_t *)&adc_buff, 1024); // 开始 ADC 采样
}
/**
* @brief 在非阻塞模式模拟看门狗回调
* @param hadc: ADC 句柄.
* @retval 无
*/
void HAL_ADC_LevelOutOfWindowCallback(ADC_HandleTypeDef *hadc)
{
float temp_adc;
flag_num++; // 电源电压超过阈值电压
temp_adc = get_vbus_val();
if (temp_adc > VBUS_MIN && temp_adc < VBUS_MAX)
{
flag_num = 0;
}
if (flag_num > 10) // 电源电压超过阈值电压10次
{
set_motor_disable();
flag_num = 0;
printf("电源电压超过限制!请检查原因,复位开发板在试!\r\n");
while (1);
}
}
/**
* @brief 获取电流值(应定时调用)
* @param 无
* @retval 转换得到的电流值
*/
int32_t get_curr_val(void)
{
static uint8_t flag = 0;
static uint32_t adc_offset = 0; // 偏置电压
int16_t curr_adc_mean = 0; // 电流 ACD 采样结果平均值
curr_adc_mean = adc_mean_sum / adc_mean_count; // 保存平均值
adc_mean_count = 0;
adc_mean_sum = 0;
if (flag < 17 && is_motor_en == 0) // 仅在电机未启动时记录
{
adc_offset = curr_adc_mean; // 多次记录偏置电压,待系统稳定偏置电压才为有效值
flag += 1;
}
if (curr_adc_mean >= adc_offset)
{
curr_adc_mean -= adc_offset; // 减去偏置电压
}
else
{
curr_adc_mean = 0;
}
float vdc = (float)curr_adc_mean/(float)65536 * 3.3f; // 获取电压值
return (float)vdc / 8.0f / 0.02f * 1000.0f;
}
/**
* @brief 获取电源电压值
* @param 无
* @retval 转换得到的电流值
*/
float get_vbus_val(void)
{
float vdc = (float)vbus_adc_mean/(float)65536 * 3.3f; // 获取电压值
return ((float)vdc - (float)1.24) * (float)37.0; // 电源电压值(测量电压是电源电压的1/37)
}编写位置式PID算法
typedef struct
{
float target_val; // 目标值
float actual_val; // 实际值
float err; // 定义偏差值
float err_last; // 定义上一个偏差值
float Kp,Ki,Kd; // 定义比例、积分、微分系数
float integral; // 定义积分值
}_pid;
_pid pid_location; // 位置环控制
_pid pid_curr; // 电流环控制
_pid pid_speed; // 速度环控制
/**
* @brief PID参数初始化
* @note 无
* @retval 无
*/
void PID_param_init(void)
{
/* 位置相关初始化参数 */
pid_location.target_val = 0.0;
pid_location.actual_val = 0.0;
pid_location.err = 0.0;
pid_location.err_last = 0.0;
pid_location.integral = 0.0;
pid_location.Kp = 0.011;
pid_location.Ki = 0.0018;
pid_location.Kd = 0.0;
/* 速度相关初始化参数 */
pid_speed.target_val = 100.0;
pid_speed.actual_val = 0.0;
pid_speed.err = 0.0;
pid_speed.err_last = 0.0;
pid_speed.integral = 0.0;
pid_speed.Kp = 2.0;
pid_speed.Ki = 0.02;
pid_speed.Kd = 0.00;
/* 电流相关初始化参数 */
pid_curr.target_val = 80.0;
pid_curr.actual_val = 0.0;
pid_curr.err = 0.0;
pid_curr.err_last = 0.0;
pid_curr.integral = 0.0;
pid_curr.Kp = 0.0;
pid_curr.Ki = 3.5;
pid_curr.Kd = 0.00;
float pid_temp[3] = {pid_location.Kp, pid_location.Ki, pid_location.Kd};
set_computer_value(SEND_P_I_D_CMD, CURVES_CH1, pid_temp, 3); // 给通道 1 发送 P I D 值
pid_temp[0] = pid_speed.Kp;
pid_temp[1] = pid_speed.Ki;
pid_temp[2] = pid_speed.Kd;
set_computer_value(SEND_P_I_D_CMD, CURVES_CH2, pid_temp, 3); // 给通道 2 发送 P I D 值
pid_temp[0] = pid_curr.Kp;
pid_temp[1] = pid_curr.Ki;
pid_temp[2] = pid_curr.Kd;
set_computer_value(SEND_P_I_D_CMD, CURVES_CH3, pid_temp, 3); // 给通道 3 发送 P I D 值
}
/**
* @brief 设置目标值
* @param val 目标值
* @note 无
* @retval 无
*/
void set_pid_target(_pid *pid, float temp_val)
{
pid->target_val = temp_val; // 设置当前的目标值
}
/**
* @brief 获取目标值
* @param 无
* @note 无
* @retval 目标值
*/
float get_pid_target(_pid *pid)
{
return pid->target_val; // 设置当前的目标值
}
/**
* @brief 设置比例、积分、微分系数
* @param p:比例系数 P
* @param i:积分系数 i
* @param d:微分系数 d
* @note 无
* @retval 无
*/
void set_p_i_d(_pid *pid, float p, float i, float d)
{
pid->Kp = p; // 设置比例系数 P
pid->Ki = i; // 设置积分系数 I
pid->Kd = d; // 设置微分系数 D
}
/**
* @brief 位置环位置式PID算法实现
* @param actual_val:实际值
* @note 无
* @retval 通过PID计算后的输出
*/
float location_pid_realize(_pid *pid, float actual_val)
{
/*计算目标值与实际值的误差*/
pid->err = pid->target_val - actual_val;
/* 限定闭环死区 */
if ((pid->err >= -40) && (pid->err <= 40))
{
pid->err = 0;
pid->integral = 0;
}
/* 积分分离,偏差较大时去掉积分作用 */
if (pid->err > -1500 && pid->err < 1500)
{
pid->integral += pid->err; // 误差累积
/* 限定积分范围,防止积分饱和 */
if (pid->integral > 4000)
{
pid->integral = 4000;
}
else if (pid->integral < -4000)
{
pid->integral = -4000;
}
}
/*PID算法实现*/
pid->actual_val = pid->Kp * pid->err + pid->Ki * pid->integral + pid->Kd * (pid->err - pid->err_last);
/*误差传递*/
pid->err_last = pid->err;
/*返回当前实际值*/
return pid->actual_val;
}
/**
* @brief 速度环位置式PID算法实现
* @param actual_val:实际值
* @note 无
* @retval 通过PID计算后的输出
*/
float speed_pid_realize(_pid *pid, float actual_val)
{
/*计算目标值与实际值的误差*/
pid->err = pid->target_val - actual_val;
if ((pid->err < 0.2f) && (pid->err > -0.2f))
{
pid->err = 0.0f;
}
pid->integral += pid->err; // 误差累积
/*PID算法实现*/
pid->actual_val = pid->Kp * pid->err + pid->Ki * pid->integral + pid->Kd * (pid->err - pid->err_last);
/*误差传递*/
pid->err_last = pid->err;
/*返回当前实际值*/
return pid->actual_val;
}
/**
* @brief 电流环位置式PID算法实现
* @param actual_val:实际值
* @note 无
* @retval 通过PID计算后的输出
*/
float curr_pid_realize(_pid *pid, float actual_val)
{
/*计算目标值与实际值的误差*/
pid->err = pid->target_val - actual_val;
pid->integral += pid->err; // 误差累积
/* 限定积分范围,防止积分饱和 */
if (pid->integral > 2000)
{
pid->integral = 2000;
}
else if (pid->integral < -2000)
{
pid->integral = -2000;
}
/*PID算法实现*/
pid->actual_val = pid->Kp * pid->err + pid->Ki * pid->integral + pid->Kd * (pid->err - pid->err_last);
/*误差传递*/
pid->err_last = pid->err;
/*返回当前实际值*/
return pid->actual_val;
}
#define TARGET_CURRENT_MAX 200 // 目标电流的最大值 mA
#define TARGET_SPEED_MAX 200 // 目标速度的最大值 r/m
/**
* @brief 电机位置式 PID 控制实现(定时调用)
* @param 无
* @retval 无
*/
void motor_pid_control(void)
{
static uint32_t louter_ring_timer = 0; // 外环环周期(电流环计算周期为定时器周期T,速度环为2T,位置环为3T)
int32_t actual_current = get_curr_val(); // 读取当前电流值
if (actual_current > TARGET_CURRENT_MAX)
{
actual_current = TARGET_CURRENT_MAX;
}
if (is_motor_en == 1) // 电机在使能状态下才进行控制处理
{
static int32_t Capture_Count = 0; // 当前时刻总计数值
static int32_t Last_Count = 0; // 上一时刻总计数值
float cont_val = 0; // 当前控制值
/* 当前时刻总计数值 = 计数器值 + 计数溢出次数 * ENCODER_TIM_PERIOD */
Capture_Count = __HAL_TIM_GET_COUNTER(&TIM_EncoderHandle) + (Encoder_Overflow_Count * 65535);
/* 位置环计算 */
if (louter_ring_timer++ % 3 == 0)
{
cont_val = location_pid_realize(&pid_location, Capture_Count); // 进行 PID 计算
/* 目标速度上限处理 */
if (cont_val > TARGET_SPEED_MAX)
{
cont_val = TARGET_SPEED_MAX;
}
else if (cont_val < -TARGET_SPEED_MAX)
{
cont_val = -TARGET_SPEED_MAX;
}
set_pid_target(&pid_speed, cont_val); // 设定速度的目标值
int32_t temp = cont_val;
set_computer_value(SEND_TARGET_CMD, CURVES_CH2, &temp, 1); // 给通道 2 发送目标值
}
/* 速度环计算 */
static int32_t actual_speed = 0; // 实际测得速度
if (louter_ring_timer % 2 == 0)
{
/* 转轴转速 = 单位时间内的计数值 / 编码器总分辨率 * 时间系数 */
actual_speed = ((float)(Capture_Count - Last_Count) / 16 * 4 / 30) / (GET_BASIC_TIM_PERIOD() * 2 / 1000.0 / 60.0);
/* 记录当前总计数值,供下一时刻计算使用 */
Last_Count = Capture_Count;
cont_val = speed_pid_realize(&pid_speed, actual_speed); // 进行 PID 计算
if (cont_val > 0) // 判断电机方向
{
set_motor_direction(MOTOR_FWD);
}
else
{
cont_val = -cont_val;
set_motor_direction(MOTOR_REV);
}
cont_val = (cont_val > TARGET_CURRENT_MAX) ? TARGET_CURRENT_MAX : cont_val; // 电流上限处理
set_pid_target(&pid_curr, cont_val); // 设定电流的目标值
int32_t temp = cont_val;
set_computer_value(SEND_TARGET_CMD, CURVES_CH3, &temp, 1); // 给通道 3 发送目标值
}
/* 电流环计算 */
cont_val = curr_pid_realize(&pid_curr, actual_current); // 进行 PID 计算
if (cont_val < 0)
{
cont_val = 0; // 下限处理
}
else if (cont_val > 5500)
{
cont_val = 5500; // 速度上限处理
}
set_motor_speed(cont_val); // 设置 PWM 占空比
set_computer_value(SEND_FACT_CMD, CURVES_CH1, &Capture_Count, 1); // 给通道 1 发送实际值
}
}