线性变换
定义
设 V V V 和 W W W 都是在域 K K K上定义的向量空间, T : V → W T :V \rightarrow W T:V→W 对任二向量 x , y ∈ V x,y \in V x,y∈V,与任何标量 a ∈ K a \in K a∈K,满足:
- T ( x + y ) = T ( x ) + T ( y ) T(x+y)=T(x)+T(y) T(x+y)=T(x)+T(y)
- T ( a x ) = a T ( x ) T(ax)=aT(x) T(ax)=aT(x)
则 T T T 被称为是线性变换。
线性算子:从向量空间U映射到U的线性变换
0 0 0变换: 0 ( x ) = 0 0(x)=0 0(x)=0
自身算子: I ( x ) = x I(x)=x I(x)=x
对于 A ∈ R m × n , x ∈ R m × 1 A \in \mathcal{R}^{m \times n},x \in \mathcal{R}^{m \times 1} A∈Rm×n,x∈Rm×1,函数 T ( x ) = A x T(x)=Ax T(x)=Ax是一个从 R n \mathcal{R}^{n} Rn到 R m \mathcal{R}^{m} Rm线性变换,如果 A A A是 n × n n \times n n×n的话, T T T是一个线性算子。
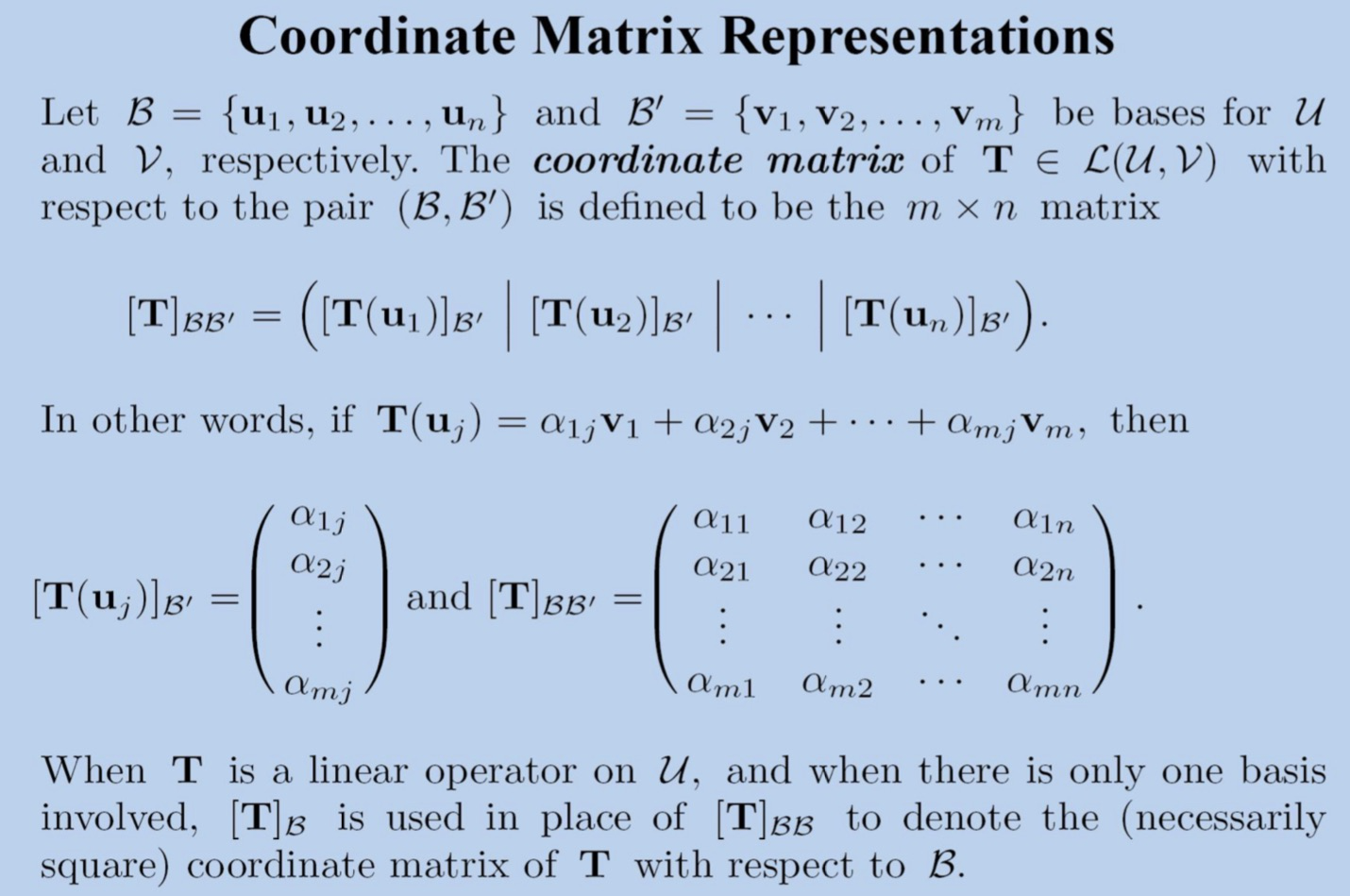
若 B = { u 1 , u 2 , … , u n } \mathcal B =\{ u_1,u_2,\dots,u_n\} B={u1,u2,…,un}是向量空间U的一组基,且 v = α 1 u 1 + α 2 u 2 + ⋯ + α n u n v=\alpha_1u_1+\alpha_2u_2+\dots+\alpha_nu_n v=α1u1+α2u2+⋯+αnun,则表示为 [ v ] B = ( α 1 , α 2 , … , α n ) T [v]_\mathcal{B}=(\alpha_1,\alpha_2,\dots,\alpha_n)^T [v]B=(α1,α2,…,αn)T。
若 A = { e 1 , e 2 , … , e n } \mathcal A =\{ e_1,e_2,\dots,e_n\} A={e1,e2,…,en},则被称为向量空间的标准基
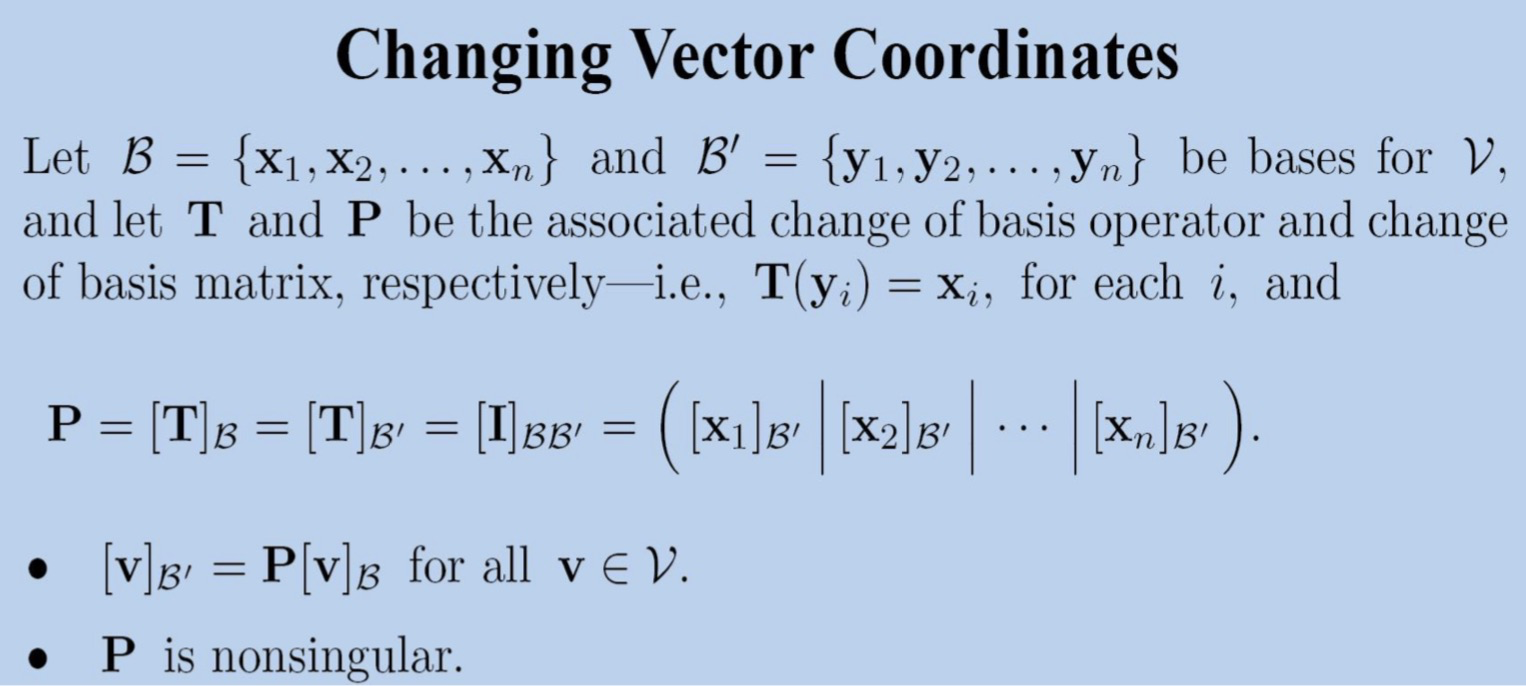
若 B = { x 1 , x 2 , … , x n } \mathcal B=\{x_1,x_2,\dots,x_n\} B={x1,x2,…,xn}与 B ′ = { y 1 , y 2 , … , y n } \mathcal B'=\{y_1,y_2,\dots,y_n\} B′={y1,y2,…,yn}分别为向量空间 V V V的两组基,其中存在一个变换 A A A在基 B \mathcal B B的表示,则 [ A ] B ′ = [ A [ x 1 ] B ′ , A [ x 2 ] B ′ , … , A [ x n ] B ′ ] [A]_\mathcal{B'}=[A[x_1]_{\mathcal{B'}},A[x_2]_\mathcal{B'},\dots,A[x_n]_\mathcal{B'}] [A]B′=[A[x1]B′,A[x2]B′,…,A[xn]B′]表示
其中 [ I ] B ′ B [I]_{\mathcal {B'B}} [I]B′B为在向量空间上基向量 B ′ \mathcal B' B′用 B \mathcal B B表示
例题1
设 T T T 为 R 3 R^3 R3 的一个线性算子,其定义为 T ( x , y , z ) = ( x − y , y − x , x − z ) T(x, y, z) = (x−y, y−x, x−z) T(x,y,z)=(x−y,y−x,x−z) , B = { u 1 = ( 1 0 1 ) , u 2 = ( 0 1 1 ) , u 3 = ( 1 1 0 ) } \mathcal B=\left\{u_1=\begin{pmatrix}1\\0\\1\end{pmatrix},u_2=\begin{pmatrix}0\\1\\1\end{pmatrix},u_3=\begin{pmatrix}1\\1\\0\end{pmatrix} \right\} B=⎩ ⎨ ⎧u1= 101 ,u2= 011 ,u3= 110 ⎭ ⎬ ⎫为其一组基, v = ( 1 1 0 ) v=\begin{pmatrix}1\\1\\0\end{pmatrix} v= 110 为 R 3 R^3 R3的一个向量。
1)分别计算 [ T ] B [T]_{\mathcal{B}} [T]B和 [ v ] B [v]_{\mathcal{B}} [v]B
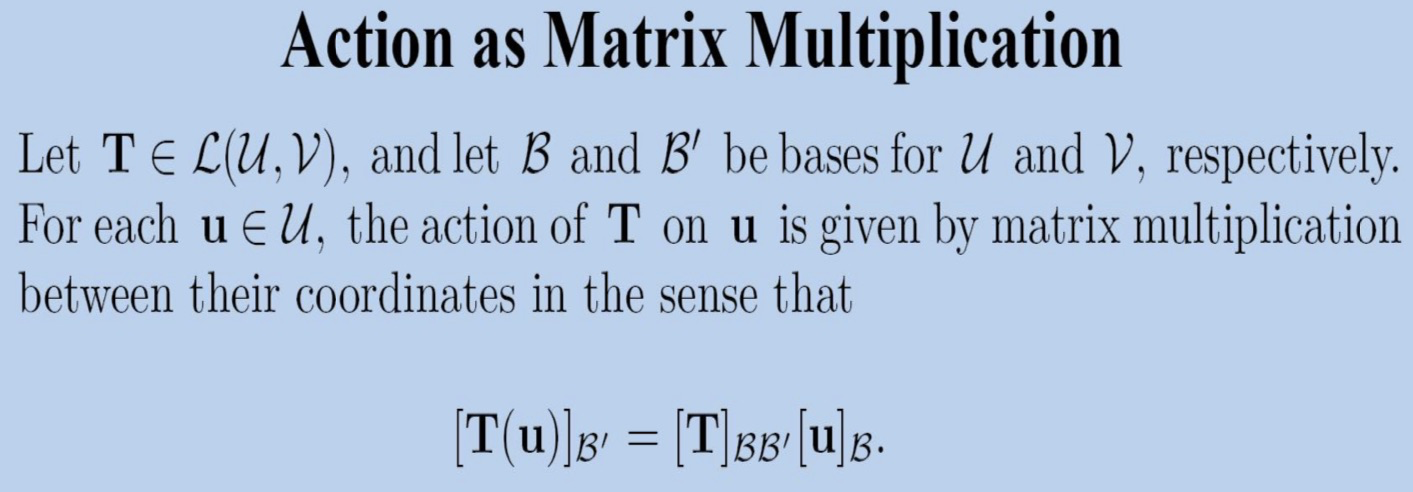
2)计算 [ T ( v ) ] B [T(v)]_{\mathcal{B}} [T(v)]B,并验证 [ T ( v ) ] B = [ T ] B [ v ] B [T(v)]_{\mathcal{B}}=[T]_{\mathcal{B}}[v]_{\mathcal{B}} [T(v)]B=[T]B[v]B 成立。
1)
首先我们计算 [ T ] B [T]_{\mathcal{B}} [T]B,它是由 T T T作用在基向量上得到的各结果的坐标向量
[ T ( u i ) ] B [T(u_i)]_{\mathcal{B}} [T(ui)]B ( i = 1 , 2 , 3 i=1,2,3 i=1,2,3)组成。即 [ T ( u 1 ) ] B = [ T ( 1 , 0 , 1 ) ] B = [ ( 1 , − 1 , 0 ) ] B , [ T ( u 2 ) ] B = [ T ( 0 , 1 , 1 ) ] B = [ ( − 1 , 1 , − 1 ) ] B , [ T ( u 3 ) ] B = [ T ( 1 , 1 , 0 ) ] B = [ ( 0 , 0 , 1 ) ] B . \begin{align*} [T(u_1)]_{\mathcal{B}} &=[T(1,0,1)]_{\mathcal{B}}=[(1, -1, 0)]_{\mathcal{B}},\\ [T(u_2)]_{\mathcal{B}} &=[T(0,1,1)]_{\mathcal{B}}=[(-1, 1, -1)]_{\mathcal{B}},\\ [T(u_3)]_{\mathcal{B}} &=[T(1,1,0)]_{\mathcal{B}}=[(0, 0, 1)]_{\mathcal{B}}. \end{align*} [T(u1)]B[T(u2)]B[T(u3)]B=[T(1,0,1)]B=[(1,−1,0)]B,=[T(0,1,1)]B=[(−1,1,−1)]B,=[T(1,1,0)]B=[(0,0,1)]B.
将以上各向量转化为 B \mathcal{B} B下的坐标向量需要解以下方程:
For [ T ( u 1 ) ] B [T(u_1)]_{\mathcal{B}} [T(u1)]B: ( 1 − 1 0 ) = a ( 1 0 1 ) + b ( 0 1 1 ) + c ( 1 1 0 ) . \begin{pmatrix}1\\-1\\0\end{pmatrix}=a\begin{pmatrix}1\\0\\1\end{pmatrix}+b\begin{pmatrix}0\\1\\1\end{pmatrix}+c\begin{pmatrix}1\\1\\0\end{pmatrix}. 1−10 =a 101 +b 011 +c 110 .
解得: a = 1 , b = − 1 , c = 0 a=1,b=-1,c=0 a=1,b=−1,c=0
For [ T ( u 2 ) ] B [T(u_2)]_{\mathcal{B}} [T(u2)]B: ( − 1 1 − 1 ) = a ( 1 0 1 ) + b ( 0 1 1 ) + c ( 1 1 0 ) . \begin{pmatrix}-1\\1\\-1\end{pmatrix}=a\begin{pmatrix}1\\0\\1\end{pmatrix}+b\begin{pmatrix}0\\1\\1\end{pmatrix}+c\begin{pmatrix}1\\1\\0\end{pmatrix}. −11−1 =a 101 +b 011 +c 110 .
解得: a = − 3 2 , b = 1 2 , c = 1 2 a=-\frac{3}{2},b=\frac{1}{2},c=\frac{1}{2} a=−23,b=21,c=21
For [ T ( u 3 ) ] B [T(u_3)]_{\mathcal{B}} [T(u3)]B: ( 0 0 1 ) = a ( 1 0 1 ) + b ( 0 1 1 ) + c ( 1 1 0 ) . \begin{pmatrix}0\\0\\1\end{pmatrix}=a\begin{pmatrix}1\\0\\1\end{pmatrix}+b\begin{pmatrix}0\\1\\1\end{pmatrix}+c\begin{pmatrix}1\\1\\0\end{pmatrix}. 001 =a 101 +b 011 +c 110 .
解得: a = 1 2 , b = 1 2 , c = − 1 2 a=\frac{1}{2},b=\frac{1}{2},c=-\frac{1}{2} a=21,b=21,c=−21
解以上各方程,我们可以得到对应的坐标向量。
此外,我们还需要求 R 3 R^3 R3中的向量 v v v在基 B \mathcal{B} B上的坐标向量 [ v ] B [v]_{\mathcal{B}} [v]B, 它可通过解以下方程得出 ( 1 1 0 ) = a ( 1 0 1 ) + b ( 0 1 1 ) + c ( 1 1 0 ) = a u 1 + b u 2 + c u 3 \begin{pmatrix}1\\1\\0\end{pmatrix}=a\begin{pmatrix}1\\0\\1\end{pmatrix}+b\begin{pmatrix}0\\1\\1\end{pmatrix}+c\begin{pmatrix}1\\1\\0\end{pmatrix} = a u_1 + b u_2 + c u_3 110 =a 101 +b 011 +c 110 =au1+bu2+cu3
解得: a = 1 , b = 1 , c = 0 a=1,b=1,c=0 a=1,b=1,c=0
综上所述:
[ T ] B = [ 1 − 3 2 1 2 − 1 1 2 1 2 0 1 2 − 1 2 ] [T]_{\mathcal{B}}=\begin{bmatrix}1&-\frac{3}{2}& \frac{1}{2}\\-1&\frac{1}{2}&\frac{1}{2}\\0&\frac{1}{2}&-\frac{1}{2}\end{bmatrix} [T]B= 1−10−2321212121−21
[ v ] B = [ 1 1 0 ] [v]_{\mathcal{B}}=\begin{bmatrix}1\\1\\0\end{bmatrix} [v]B= 110
2)
T ( v ) = ( 0 0 − 1 ) T(v)=\begin{pmatrix}0\\0\\-1\end{pmatrix} T(v)= 00−1
[ T ( v ) ] B = a ( 1 0 1 ) + b ( 0 1 1 ) + c ( 1 1 0 ) [T(v)]_{\mathcal{B}}=a\begin{pmatrix}1\\0\\1\end{pmatrix}+b\begin{pmatrix}0\\1\\1\end{pmatrix}+c\begin{pmatrix}1\\1\\0\end{pmatrix} [T(v)]B=a 101 +b 011 +c 110
解得 [ T ( v ) ] b = ( − 1 2 − 1 2 1 2 ) [T(v)]_\mathcal{b}=\begin{pmatrix}-\frac{1}{2}\\-\frac{1}{2}\\\frac{1}{2}\end{pmatrix} [T(v)]b= −21−2121
所以 [ T ( v ) ] B = [ T ] B [ v ] B [T(v)]_{\mathcal{B}}=[T]_{\mathcal{B}}[v]_{\mathcal{B}} [T(v)]B=[T]B[v]B
例题2
设 A ( x , y , z ) = ( x + 2 y − z , − y , x + 7 z ) A(x,y,z)=(x+2y-z,-y,x+7z) A(x,y,z)=(x+2y−z,−y,x+7z)为 R 3 R^3 R3 的一个线性算子,其定义为 T ( x , y , z ) = ( x − y , y − x , x − z ) T(x, y, z) = (x−y, y−x, x−z) T(x,y,z)=(x−y,y−x,x−z) , B = { ( 1 0 0 ) , ( 0 1 0 ) , ( 0 0 1 ) } , B ′ = { ( 1 0 0 ) , ( 1 1 0 ) , ( 1 1 1 ) } \mathcal B=\left\{\begin{pmatrix}1\\0\\0\end{pmatrix},\begin{pmatrix}0\\1\\0\end{pmatrix},\begin{pmatrix}0\\0\\1\end{pmatrix} \right\},\mathcal B'=\left\{\begin{pmatrix}1\\0\\0\end{pmatrix},\begin{pmatrix}1\\1\\0\end{pmatrix},\begin{pmatrix}1\\1\\1\end{pmatrix} \right\} B=⎩ ⎨ ⎧ 100 , 010 , 001 ⎭ ⎬ ⎫,B′=⎩ ⎨ ⎧ 100 , 110 , 111 ⎭ ⎬ ⎫为其一组基, v = ( 1 1 0 ) v=\begin{pmatrix}1\\1\\0\end{pmatrix} v= 110 为 R 3 R^3 R3的一个向量。
1)分别计算 [ A ] B [A]_{\mathcal{B}} [A]B和 [ A ] B ′ [A]_{\mathcal{B'}} [A]B′
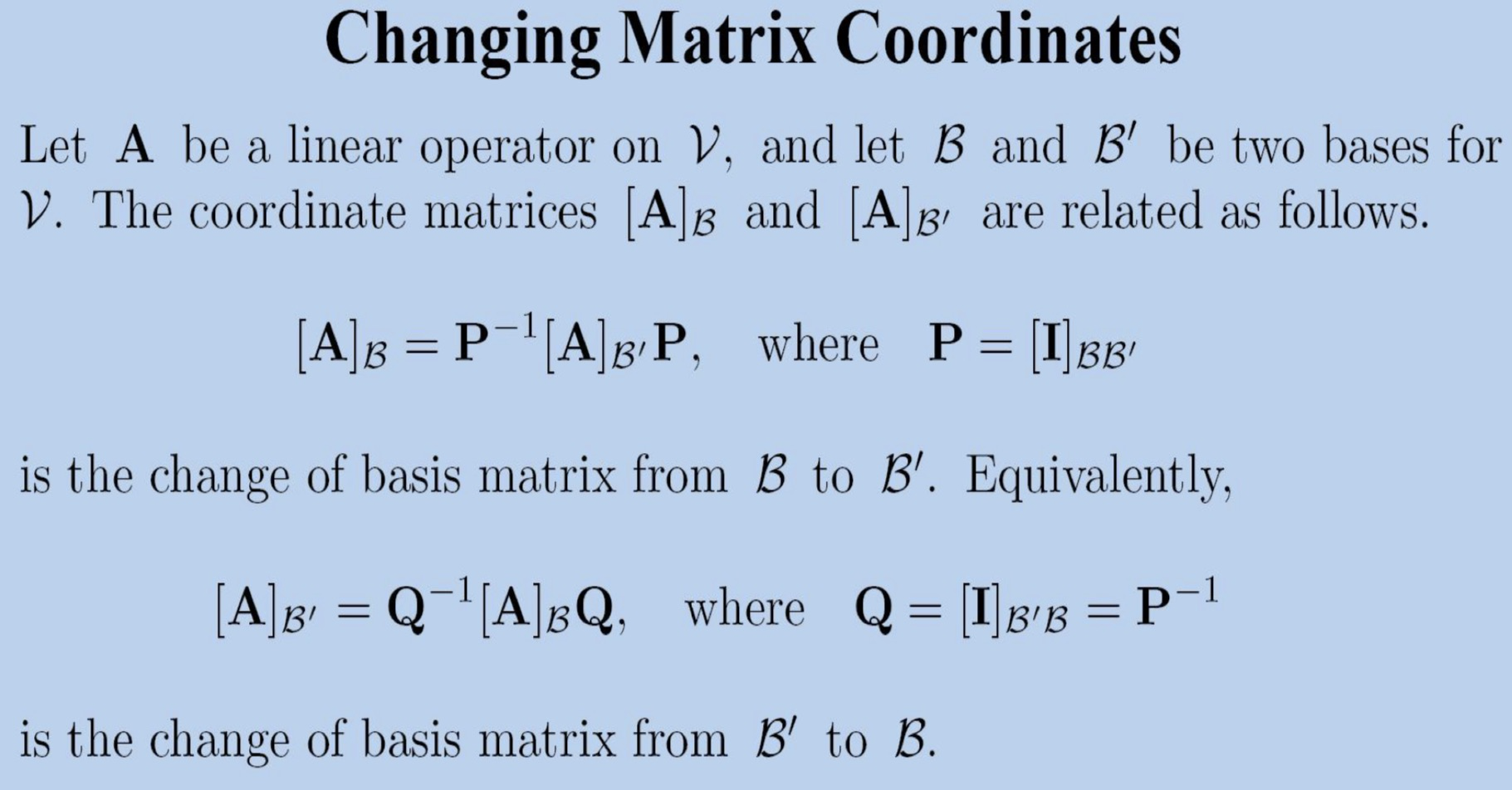
2)求矩阵 Q Q Q,使得 [ A ] B ′ = Q − 1 [ A ] B Q [A]_\mathcal {B'}=Q^{-1}[A]_\mathcal {B}Q [A]B′=Q−1[A]BQ成立。
首先,我们需要找出在 B \mathcal{B} B和 B ′ \mathcal{B'} B′基下的矩阵 A A A的表示即 [ A ] B [A]_{\mathcal{B}} [A]B和 [ A ] B ′ [A]_{\mathcal{B'}} [A]B′。这一步可以通过将线性变换应用于基向量并将结果写成列向量的形式完成。
线性算子 A A A以 B \mathcal B B为基的矩阵表示为: [ A ] B = [ A ( 1 , 0 , 0 ) A ( 0 , 1 , 0 ) A ( 0 , 0 , 1 ) ] B [A]_{\mathcal{B}} = \left[ \begin{array}{ccc} A(1,0,0) & A(0,1,0) & A(0,0,1) \\ \end{array} \right]_{\mathcal{B}} [A]B=[A(1,0,0)A(0,1,0)A(0,0,1)]B = [ A ( e 1 ) , A ( e 2 ) , A ( e 3 ) ] B =[A(e_1),A(e_2),A(e_3)]_\mathcal{B} =[A(e1),A(e2),A(e3)]B
计算得到 [ A ] B = [ A ( 1 , 0 , 0 ) A ( 0 , 1 , 0 ) A ( 0 , 0 , 1 ) ] B = [ 1 2 − 1 0 − 1 0 1 0 7 ] [A]_{\mathcal{B}} = \left[ \begin{array}{ccc} A(1,0,0) & A(0,1,0) & A(0,0,1) \\ \end{array} \right]_\mathcal B = \left[ \begin{array}{ccc} 1 & 2 & -1 \\ 0 & -1 & 0 \\ 1 & 0 & 7 \\ \end{array} \right] [A]B=[A(1,0,0)A(0,1,0)A(0,0,1)]B= 1012−10−107
线性算子 A A A以 B ′ \mathcal B' B′为基的矩阵表示为: [ A ] B ′ = [ A ( 1 , 0 , 0 ) A ( 1 , 1 , 0 ) A ( 1 , 1 , 1 ) ] B ′ [A]_{\mathcal{B'}} = \left[ \begin{array}{ccc} A(1,0,0) & A(1,1,0) & A(1,1,1) \\ \end{array} \right] _{\mathcal{B'}} [A]B′=[A(1,0,0)A(1,1,0)A(1,1,1)]B′ = [ A ( e 1 ′ ) , A ( e 2 ′ ) , A ( e 3 ′ ) ] B ′ =[A(e_1'),A(e_2'),A(e_3')]_\mathcal{B'} =[A(e1′),A(e2′),A(e3′)]B′
计算得到 [ A ] B ′ = [ A ( 1 , 0 , 0 ) A ( 1 , 1 , 0 ) A ( 1 , 1 , 1 ) ] B ′ = [ 1 4 3 − 1 − 2 9 1 1 8 ] [A]_{\mathcal{B'}} = \left[ \begin{array}{ccc} A(1,0,0) & A(1,1,0) & A(1,1,1) \\ \end{array} \right]_\mathcal {B'} = \left[ \begin{array}{ccc} 1 & 4 & 3 \\ -1 & -2 & 9 \\ 1 & 1 & 8 \\ \end{array} \right] [A]B′=[A(1,0,0)A(1,1,0)A(1,1,1)]B′= 1−114−21398
接下来求矩阵 Q Q Q,使得 [ A ] B ′ = Q − 1 [ A ] B Q [A]_\mathcal {B'}=Q^{-1}[A]_\mathcal {B}Q [A]B′=Q−1[A]BQ成立。
我们已经知道 B = { e 1 , e 2 , e 3 } \mathcal{B}=\{e_1,e_2,e_3\} B={e1,e2,e3}和 B ′ = { e 1 ′ , e 2 ′ , e 3 ′ } \mathcal{B'}=\{e_1',e_2',e_3'\} B′={e1′,e2′,e3′}。
给出两个基 B \mathcal B B和 B ′ \mathcal B' B′,要找出矩阵 I I I在基 B ′ \mathcal B' B′和 B \mathcal B B之间的表示 [ I ] B ′ B [I]_{\mathcal B' \mathcal B} [I]B′B。 第一个基 B \mathcal B B是标准基,我们考虑将 B ′ \mathcal B' B′的基向量表示为 B \mathcal B B的线性组合。具体地:
第一个基向量在 B ′ \mathcal B' B′中是 ( 1 0 0 ) \begin{pmatrix}1\\0\\0\end{pmatrix} 100 ,这就是 B \mathcal B B的第一个基向量,所以在 B \mathcal B B的基的表示下,首列是 ( 1 , 0 , 0 ) T (1,0,0)^T (1,0,0)T。
第二个基向量在 B ′ \mathcal B' B′中是 ( 1 1 0 ) \begin{pmatrix}1\\1\\0\end{pmatrix} 110 ,它可以被表示为 B \mathcal B B的第一个和第二个基向量的和,于是在 B \mathcal B B的基的表示下,第二列是 ( 1 , 1 , 0 ) T (1,1,0)^T (1,1,0)T。
第三个基向量在 B ′ \mathcal B' B′中是 ( 1 1 1 ) \begin{pmatrix}1\\1\\1\end{pmatrix} 111 ,它可以被表示为 B \mathcal B B所有三个基向量的和,所以在 B \mathcal B B的基的表示下,第三列是 ( 1 , 1 , 1 ) T (1,1,1)^T (1,1,1)T。
以 B \mathcal B B的基表示,我们得到: [ I ] B ′ B = ( 1 1 1 0 1 1 0 0 1 ) [I]_{\mathcal B' \mathcal B}=\begin{pmatrix}1&1&1\\0&1&1\\0&0&1\end{pmatrix} [I]B′B= 100110111 这就是矩阵 I I I在 B ′ \mathcal B' B′和 B \mathcal B B之间的线性变换矩阵。
例题三
对于 R 2 × 2 R^{2\times2} R2×2 矩阵,$\mathcal B = \left{ \begin{bmatrix} 1 & 0 \ 0 & 0 \end{bmatrix}, \begin{bmatrix} 0 & 1 \ 0 & 0 \end{bmatrix}, \begin{bmatrix} 0 & 0 \ 1 & 0 \end{bmatrix}, \begin{bmatrix} 0 & 0 \ 0 & 1 \end{bmatrix} \right} $
对其中一组矩阵, 对于该运算中任意矩阵 A A A, 定义映射 T 定义如下:
$T(A) = \frac{A + A^T}{2} $
计算 [ T ] B [T]_\mathcal B [T]B.
首先我们需要了解一下所给出的映射 T T T如何作用于一个矩阵。给定矩阵 A = [ a b c d ] A=\begin{bmatrix} a & b \\ c & d \end{bmatrix} A=[acbd], 我们可以计算:
T ( A ) = A + A T 2 = [ a b c d ] + [ a c b d ] 2 = [ a b + c 2 b + c 2 d ] T(A) = \frac{A + A^T}{2} = \frac{\begin{bmatrix} a & b \\ c & d \end{bmatrix} + \begin{bmatrix} a & c \\ b & d \end{bmatrix}}{2} = \begin{bmatrix} a & \frac{b+c}{2} \\ \frac{b+c}{2} & d \end{bmatrix} T(A)=2A+AT=2[acbd]+[abcd]=[a2b+c2b+cd]
为了找到矩阵 [ T ] B [T]_B [T]B,我们需要将基 B B B中的每一个矩阵分别带入 T T T中,并表示其结果为 B B B基下的坐标。
对于 [ 1 0 0 0 ] \begin{bmatrix} 1 & 0 \\ 0 & 0 \end{bmatrix} [1000]:
T ( [ 1 0 0 0 ] ) = [ 1 0 0 0 ] = 1 ⋅ [ 1 0 0 0 ] + 0 ⋅ [ 0 1 0 0 ] + 0 ⋅ [ 0 0 1 0 ] + 0 ⋅ [ 0 0 0 1 ] T\left( \begin{bmatrix} 1 & 0 \\ 0 & 0 \end{bmatrix} \right) = \begin{bmatrix} 1 & 0 \\ 0 & 0 \end{bmatrix} = 1 \cdot \begin{bmatrix} 1 & 0 \\ 0 & 0 \end{bmatrix} + 0 \cdot \begin{bmatrix} 0 & 1 \\ 0 & 0 \end{bmatrix} + 0 \cdot \begin{bmatrix} 0 & 0 \\ 1 & 0 \end{bmatrix} + 0 \cdot \begin{bmatrix} 0 & 0 \\ 0 & 1 \end{bmatrix} T([1000])=[1000]=1⋅[1000]+0⋅[0010]+0⋅[0100]+0⋅[0001]
所以,第一列为 [ 1 0 0 0 ] \begin{bmatrix} 1 \\ 0 \\ 0 \\ 0 \end{bmatrix} 1000 。
对于 [ 0 1 0 0 ] \begin{bmatrix} 0 & 1 \\ 0 & 0 \end{bmatrix} [0010]:
T ( [ 0 1 0 0 ] ) = [ 0 0.5 0.5 0 ] = 0 ⋅ [ 1 0 0 0 ] + 0.5 ⋅ [ 0 1 0 0 ] + 0.5 ⋅ [ 0 0 1 0 ] + 0 ⋅ [ 0 0 0 1 ] T\left( \begin{bmatrix} 0 & 1 \\ 0 & 0 \end{bmatrix} \right) = \begin{bmatrix} 0 & 0.5 \\ 0.5 & 0 \end{bmatrix} = 0 \cdot \begin{bmatrix} 1 & 0 \\ 0 & 0 \end{bmatrix} + 0.5 \cdot \begin{bmatrix} 0 & 1 \\ 0 & 0 \end{bmatrix} + 0.5 \cdot \begin{bmatrix} 0 & 0 \\ 1 & 0 \end{bmatrix} + 0 \cdot \begin{bmatrix} 0 & 0 \\ 0 & 1 \end{bmatrix} T([0010])=[00.50.50]=0⋅[1000]+0.5⋅[0010]+0.5⋅[0100]+0⋅[0001]
所以,第二列为 [ 0 0.5 0.5 0 ] \begin{bmatrix} 0 \\ 0.5 \\ 0.5 \\ 0 \end{bmatrix} 00.50.50 。
对于 [ 0 0 1 0 ] \begin{bmatrix} 0 & 0 \\ 1 & 0 \end{bmatrix} [0100]:
这个矩阵和上一个矩阵相同,所以第三列也是 [ 0 0.5 0.5 0 ] \begin{bmatrix} 0 \\ 0.5 \\ 0.5 \\ 0 \end{bmatrix} 00.50.50 。
对于 [ 0 0 0 1 ] \begin{bmatrix} 0 & 0 \\ 0 & 1 \end{bmatrix} [0001]:
T ( [ 0 0 0 1 ] ) = [ 0 0 0 1 ] = 0 ⋅ [ 1 0 0 0 ] + 0 ⋅ [ 0 1 0 0 ] + 0 ⋅ [ 0 0 1 0 ] + 1 ⋅ [ 0 0 0 1 ] T\left( \begin{bmatrix} 0 & 0 \\ 0 & 1 \end{bmatrix} \right) = \begin{bmatrix} 0 & 0 \\ 0 & 1 \end{bmatrix} = 0 \cdot \begin{bmatrix} 1 & 0 \\ 0 & 0 \end{bmatrix} + 0 \cdot \begin{bmatrix} 0 & 1 \\ 0 & 0 \end{bmatrix} + 0 \cdot \begin{bmatrix} 0 & 0 \\ 1 & 0 \end{bmatrix} + 1 \cdot \begin{bmatrix} 0 & 0 \\ 0 & 1 \end{bmatrix} T([0001])=[0001]=0⋅[1000]+0⋅[0010]+0⋅[0100]+1⋅[0001]
所以,第四列为 [ 0 0 0 1 ] \begin{bmatrix} 0 \\ 0 \\ 0 \\ 1 \end{bmatrix} 0001 。
综上, [ T ] B [T]_\mathcal B [T]B为:
[ T ] B = [ 1 0 0 0 0 0.5 0.5 0 0 0.5 0.5 0 0 0 0 1 ] [T]_\mathcal B = \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 0.5 & 0.5 & 0 \\ 0 & 0.5 & 0.5 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} [T]B= 100000.50.5000.50.500001