系列文章目录
文章目录
- 系列文章目录
- 前言
- 一、ROS —— 什么是全身控制?
- 二、IEEE - RAS
- 三、维也纳工业大学 —— 自动化与控制研究所(ACIN)
- 四、IIt(意大利技术研究院)
前言
谷歌的几种解释
一、ROS —— 什么是全身控制?
在这里,全身控制指的是 Oussama Khatib 教授提出的一种控制框架。该框架也被称为任务空间控制、操作空间控制或操作空间制定。
当你控制一个有很多关节的机器人时,很难计算出所需的关节角度/力矩集。传统的方法是逆运动学(IK),这是一种几何解决方案。ahl_wbc 可以根据机器人指尖的期望位置/方位计算所需的角度/力矩集。
因此,如果使用这个框架,就可以在不使用 IK 的情况下轻松控制复杂的机器人。此外,如果机器人的每个关节都有扭矩传感器,那么指尖的所有力、位置和方向都可以通过混合方式进行控制。
author = {Oussama Khatib},
title = {A Unified Approach for Motion and Force Control of Robot Manipulators: The Operational Space Formulation},
year = {1987},
month = {February},
booktitle = {IEEE Journal of Robotics and Automation (RA-3)},
}
二、IEEE - RAS
随着对机器人学研究兴趣的不断增长,机器人已经越来越熟练地执行许多不同的、非同小可的任务,例如跑步、跳跃、爬楼梯和操纵物体。然而,在大多数情况下,这些任务都是单独完成的,这就从根本上限制了机器人在现实世界中的应用。虽然人类偶尔会在单项任务上胜过机器人,但人类在调整和组合行为以解决多项不同任务方面的能力却远胜于机器人。这种灵活性使人类能够推广自己的知识,并成功完成以前从未明确面对过的任务。这也为同时执行多项任务打开了大门。为了解决这些制约因素,有人提出全身控制(WBC)是一个很有前途的研究方向。WBC 的目标是 i) 定义一小套简单、低维的规则(如平衡、避免自身碰撞等) ii) 在可行的情况下,足以保证正确执行任何单一任务(如用一个末端执行器伸手抓取物体),以及同时执行多个任务(如用一个末端执行器伸手抓取物体)、 iii) 充分利用冗余浮动式机器人整个身体的能力,实现与环境的多接触交互。因此,专门为保证执行单一任务而设计的控制系统,即使使用了机器人的所有关节,也不能被视为 WBC 系统。一个 WBC 系统必须具有足够的通用性,以便能够执行多个(最好是任何)任务。
WBC TC 将涵盖但不限于以下主题:
- Whole-body position/force control —— 全身位置/力控制
- Model-based dynamics control —— 基于模型的动力学控制
- Centroidal momentum —— 中心动量
- Multi-contact forces distribution —— 多接触力分布
- Torque-control —— 扭矩控制
- Compliant body behavior —— 顺应性身体行为
- Agile locomotion and dexterous manipulation —— 敏捷运动和灵巧操纵
- Real Time Implementation of Whole-Body Control —— 实时实现全身控制

三、维也纳工业大学 —— 自动化与控制研究所(ACIN)
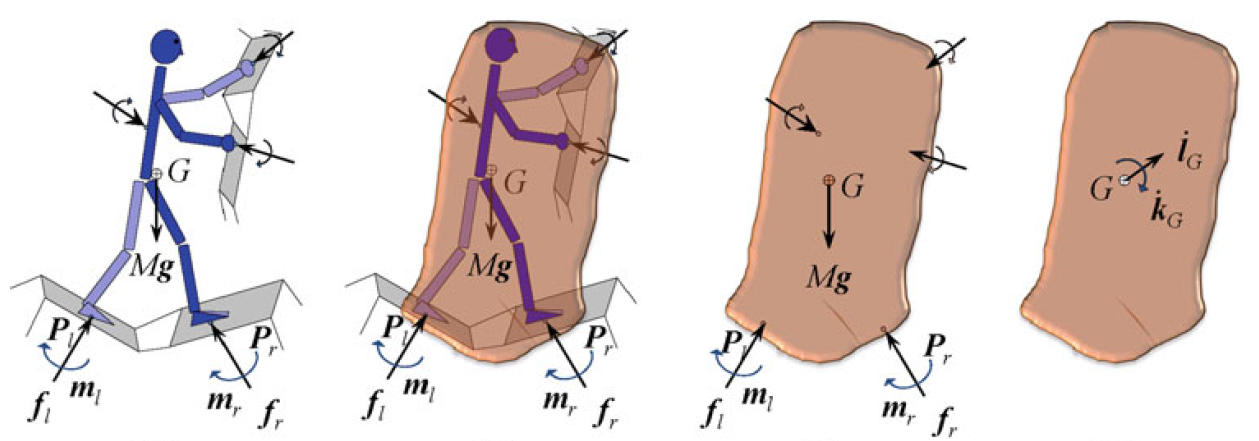
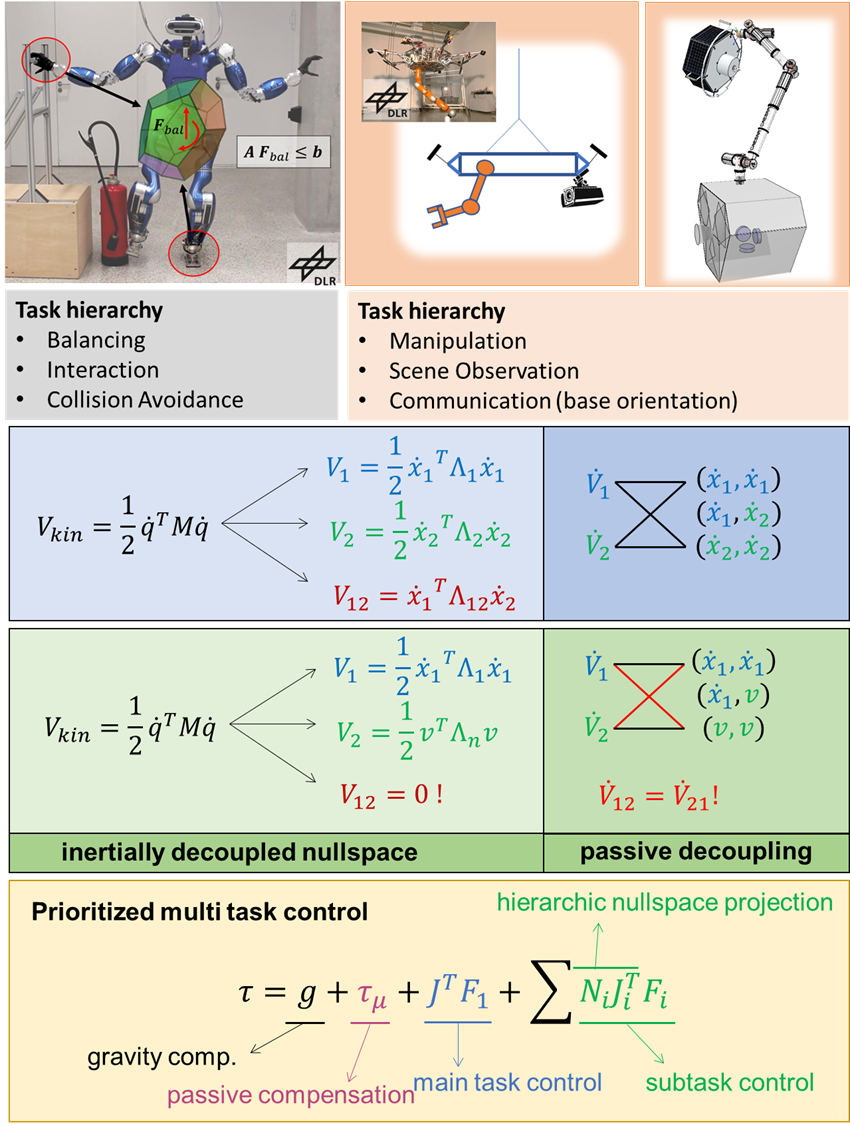
机器人学中的全身控制是指通过统一的控制算法来控制具有运动和操纵子系统的移动机械手。因此,全身控制与同时控制多个任务(可能具有不同的任务优先级)密切相关。例如,对于仿人机器人来说,这些任务可能是
- 控制末端执行器的运动
- 物理交互和力控制
- 避免碰撞
- 安全相关任务
- 姿势稳定性(如腿式机器人的平衡任务)。
这些任务通常具有不同的重要性(即优先级),因此需要采用分层控制方法。我们对全身控制的研究得益于系统表示法,其中任务坐标以惯性解耦形式出现。作为应用,我们考虑了移动机械手系统,如轮式和腿式人形机械手、轨道机械手和缆索支撑的空中机械手。
在轨道机械手中,我们特别强调要充分利用基地卫星的驱动系统。为了节省燃料,只要仅靠机械手和机载反作用轮(如果有的话)就能实现控制目标,就会避免使用推进器。此外,研究还发现,当对卫星精确定位的要求放宽时,基于动量的控制策略可以产生高效的控制器。
四、IIt(意大利技术研究院)
我们的目标是在具有挑战性的非结构化地形上实现动态运动。这需要对机器人的动态、执行限制以及与环境的交互进行推理。为此,我们利用运动控制中的优化技术来制定全身控制(WBC)。
WBC 是一种运动跟踪控制器,能够实现多种运动任务,同时尊重机器人的行为。WBC 将运动控制视为一个优化问题,通过结合腿部机器人的全部动力学特性,利用其所有自由度 (DoF),将所需的运动任务分散到所有关节。这样,我们就能推理出多个任务,并以优化的方式解决它们,同时尊重整个系统的动力学特性以及执行和交互约束。
我们的 WBC 在 HyQ 上进行了测试,使用不同的步态(爬行和小跑)在各种具有挑战性的地形(斜坡、缝隙、楼梯等)上进行了测试。我们的 WBC 对不准确的摩擦系数估计和不稳定的立足点具有很强的鲁棒性。








![BUUCTF [GXYCTF2019]佛系青年 1](https://img-blog.csdnimg.cn/50e52f788e7047629575ac459f8f46a7.png)