文章目录
- 一、位图
- 1.1 一道面试题
- 1.2 位图的概念
- 1.3 位图的模拟实现
- 1.4 位图的应用
- 1.4.1 给定100亿个整数,设计算法找到只出现一次的整数
- 1.4.2 给两个文件,分别有100亿个整数,我们只有1G内存,如何找到两个文件交集?
- 1.4.3 1个文件有100亿个int,1G内存,设计算法找到出现次数不超过2次的所有整数
- 二、布隆过滤器
- 2.1 布隆过滤器的提出
- 2.2 布隆过滤器的概念
- 2.3 布隆过滤器的插入
- 2.4 布隆过滤器的查找
- 2.5 布隆过滤器的删除
- 2.6 布隆过滤器的优点
- 2.7 布隆过滤器的缺陷
- 2.8 布隆过滤器的实际应用场景
- 三、哈希切分
- 四、结语
一、位图
1.1 一道面试题
给40亿个不重复的无符号整数,没排过序。给一个无符号整数,如何快速判断一个数是否在这40亿个数中。
解决方案:
-
遍历:遍历这40亿个整数,去判断该数是否在这40亿个整数中。时间复杂度是 O ( N ) O(N) O(N)。
-
set:用 set 将这40亿个整数存起来,然后去判断这个数是否在 set 中。时间复杂度是 O ( l o g 2 N ) O(log2^N) O(log2N)。
-
排序 + 二分查找:快排的时间复杂度是 O ( N ∗ l o g 2 N ) O(N*log2^N) O(N∗log2N),二分查找的时间复杂度是 O ( l o g 2 N ) O(log2^N) O(log2N)。
存在的问题:40亿个整数是160亿Byte。由 1 G = 1024 M B = 1024 ∗ 1024 K b = 1024 ∗ 1024 ∗ 1024 B y t e 1G = 1024MB = 1024*1024Kb = 1024*1024*1024 Byte 1G=1024MB=1024∗1024Kb=1024∗1024∗1024Byte,推出 10 亿 B y t e ≈ 1 G 10亿Byte≈1G 10亿Byte≈1G。所以 160 亿 B y t e ≈ 16 G 160亿Byte≈16G 160亿Byte≈16G(不到 16G)。上面这三种方法都需要将这40亿个整数先存储起来,这就需要从内存中分配 16G 空间来存储(假设单纯的用数组来存储,如果使用 set,set 中的节点不止存储整型数据,还会存储一些附带的东西,比如指针,最终需要的内存空间是远大于 16G 的),但是普通电脑的内存大小就是 8G 或者 16G,上面这三种做法显然是不符合实际的。那该怎么去解决呢?这道题目本质上是让我们去判断在不在,因此我们无需将这 40亿 个整数都存起来,只需要用一个标志位去判断在不在,比如 1 表示在,0 表示不在。存储标志位的最小单位是 bit。大体思路有了,下面引出位图的概念,这道题目需要使用位图去解决。
1.2 位图的概念
所谓位图,这里位指的就是比特位,位图就是用每一个比特位来存放某种状态,适用于海量数据,数据无重复的场景。通常是用来判断某个数据存不存在的。

如上图所示,要判断一个数字是否在 array 数组中,这里我们可以借助位图来实现。这里我们采用直接定址法,即 array 中的每一个数字都对应一个比特位,互相不重复。这就要求位图的大小是 array 数组中整型变量的范围。array 中整型的范围是 [1,22],里面一共包含 22 个整型,因此这里的位图需要 22 个比特位。一个字符型 char 会向内存申请一个字节(8比特),所以这里我们创建一个可以存储 3 个字符的字符数组来充当位图。有了位图之后,接下来我们就需要对位图中的每一位进行标记,将 array 中的整型所对应的位图中的位设置成 1。然后给我们一个整型数据 x,要判断 x 是否在 array 中,我们只需要去判断 x 对应位图中的那个位上是 1 还是 0,如果是 1 就说明 array 中存在 x 这个整型,如果是 0 说明 array 中不存在 x 这个整型。
回到上面的面试题:先创建一个位图,位图的大小取决于数据的范围,面试题中说的是40亿个不重复的无符号整型,所以这里的数据范围就是无符号整型的范围,即 0~4294967295。因此我们需要向内存申请 4294967295 个比特位也就是 2 32 2^{32} 232 个比特位。 2 3 2^3 23 个比特位就是一个字节,所以 2 32 2^{32} 232 个比特位就是 2 29 2^{29} 229 个字节。由 1 G = 1024 M B = 1024 ∗ 1024 K b = 1024 ∗ 1024 ∗ 1024 B y t e = 2 30 B y t e 1G = 1024MB = 1024*1024Kb = 1024*1024*1024 Byte = 2^{30} Byte 1G=1024MB=1024∗1024Kb=1024∗1024∗1024Byte=230Byte,推出 2 29 B y t e = 0.5 G = 500 M B 2^{29}Byte = 0.5G = 500MB 229Byte=0.5G=500MB。对普通电脑来说,向内存申请 0.5G 的空间还是轻轻松松的。
1.3 位图的模拟实现
template<size_t N>//这里的 N 是一个非类型模板参数,表示要开 N 个比特位
class bitset
{
public:
bitset()
{
size_t size = N / 32 + 1;
_a.resize(size, 0);
//最坏情况下,N / 32 能够整除,那就会浪费一个整型的大小,即四个字节。
}
//把 x 映射的那个比特位标记成1
void set(size_t x)
{
size_t i = x / 32;
size_t j = x % 32;
_a[i] |= (1 << j);//位运算的左移和右移不是方向,左移是往高位进行移动,右移是往地位进行移动,至于底层到底是大端机还是小端机我们根本不用关心是怎么移动的
}
//把 x 映射的那个比特位标记成0
void reset(size_t x)
{
size_t i = x / 32;
size_t j = x % 32;
_a[i] &= ~(1 << j);
}
//检测 x 映射的那个比特位是 0 还是 1
bool test(size_t x)
{
size_t i = x / 32;
size_t j = x % 32;
return _a[i] & (1 << j);
}
private:
vector<int> _a;
};
小Tips:C++ 中没有一个类型的大小是一个比特位,因此我们采用一个整型数组的方式,一个整型 4 个字节,32 个比特位。bitset 这个类采用了非类型模板参数,用户将需要开辟多少个比特位传进来,然后开辟对应大小的数组。其次位图中的一个重点内容就是找到 x 对应的比特位,这里分两步,第一步要先找到 x 属于数组中的哪一个整型,用 x / 32 x / 32 x/32 即可以得到,然后需要确定 x 对应该整型的哪一位,用 x x x % 32 32 32 即可以得到。 找到对应的比特位后,还要对该比特位进行置 0 或置 1 操作来进行标记,因为我们的底层是用的整型数组,所以对某一个比特位进行置 0 或置 1 操作,本质上是对整型数组中的某一个整型进行位操作。
1.4 位图的应用
1.4.1 给定100亿个整数,设计算法找到只出现一次的整数
思路:回顾一下上面 40亿 个整数判断在不在的问题,我们的做法是让所有的整数都对应一个比特位,这个比特位用来标记该整型是否出现在这 40亿 个整型中。这里为什么每一个整型只需要对应一个比特位?因为一个整型只有在这 40亿 个数里面和不在这 40亿 个数里面两种情况,这两种情况我们分别可以用 1 和 0 来表示,而 1 和 0 都只占用一个比特位。
回到这道题目,我们任然可以采用标记位的方式来处理。对于一个整数来说,它在这 100亿 个整数中出现的情况有三种:出现了 0 次,出现了 1 次,出现了多次(两次及以上)。这道题目我们只需要这三种标记即可,一个比特位可以表示两个标记,那要想能够表示三个标记就至少需要两个比特位了,两个比特位一共有四种组合:00、01、10、11,完全够用了。总结:这道题目要对上面提到的位图稍作修改,这道题目中一个整数需要对应两个比特位。我们现有的位图都是一个整数对应一个比特位,自己再重新写一个对应两个比特位的会比较麻烦,这里我们可以直接使用现成的,开辟两个位图即可。
template<size_t N>
class twobitset
{
public:
void set(size_t x)
{
//00-->01
if (!_bs1.test(x) && !_bs2.test(x))
{
_bs2.set(x);
}
else if (!_bs1.test(x) && _bs2.test(x))//01-->10
{
_bs1.set(x);
_bs2.reset(x);
}
//如果是10,那就表示出现次数是两次及以上
}
bool is_once(size_t x)
{
return !_bs1.test(x) && _bs2.test(x);
}
private:
bitset<N> _bs1;
bitset<N> _bs2;
};
void Testtwobitset()
{
int arr[] = { 1,1,2,3,77,7,7,7,90,100,100,90 };
wcy::twobitset<101> tbs;
for (auto e : arr)
{
tbs.set(e);
}
for (auto e : arr)
{
if (tbs.is_once(e))
{
cout << e << ' ';
}
}
}

1.4.2 给两个文件,分别有100亿个整数,我们只有1G内存,如何找到两个文件交集?
思路一:将其中一个文件的所有值映射到一个位图,然后去遍历另一个文件中的数据去判断在不在。这种思路存在一个缺陷,得到的交集中可能出现重复值的情况,而正常情况下交集中是不应该出现重复值,因此在前面求得交集后,还需要用 set 进行去重。这里可能会出现重复的数据过多的情况,去使用 set 可能会超过 1G 内存。
思路二: 将两个文件中的整数分别映射到两个位图中,然后再将两个位图按位与一下,得到一个新的位图,该位图中值为 1 的比特位对应的整数就是交集。
void Testintersection()
{
int arr1[] = { 1,1,2,3,77,7,7,7,90,100,100,90 };
int arr2[] = { 1111,12,2,31,771,71,7,70,901,100,10011,90 };
wcy::bitset<10012> bs1;
wcy::bitset<10012> bs2;
for (auto e : arr1)
{
bs1.set(e);
}
for (auto e : arr2)
{
bs2.set(e);
}
for (size_t i = 0; i < 10012; ++i)
{
if (bs1.test(i) && bs2.test(i))
{
cout << i << ' ';
}
}
}
小Tips:上面用两个数组 arr1 和 arr2 来模拟两个文件。另外需要注意:位图到底需要多少个比特位不是取决于数据的个数,而是取决于这一堆数据可能的范围,数据范围有多大位图就需要开辟多少个比特位。
1.4.3 1个文件有100亿个int,1G内存,设计算法找到出现次数不超过2次的所有整数
思路:这道题的思路和 1.4.1 的思路是相同的,用两个位图,产生两个标记位来解决即可,这里就不再过多赘述。
二、布隆过滤器
2.1 布隆过滤器的提出
我们在使用新闻客户端看新闻时,它会给我们不停地推荐新的内容,它每次推荐时要去重,去掉那些已经看过的内容。问题来了,新闻客户端推荐系统如何实现推送去重的?用服务器记录了用户看过的所有历史记录,当推荐系统推荐新闻时会从每个用户的历史记录里进行筛选,过滤掉那些已经存在的记录。如何快速查找呢?
-
用哈希表存储用户记录,缺点:浪费空间。
-
用位图存储用户记录,缺点:位图一般只能处理整型,如果内容编号是字符串,就无法处理了。
-
将哈希与位图结合,即布隆过滤器。
2.2 布隆过滤器的概念
布隆过滤器是由布隆(Burton Howard Bloom)在 1970 年提出的一种紧凑型的、比较巧妙的概率型数据结构特点是高效地插入和查询,可以用来告诉你“某样东西一定不存在或者可能存在”,它是用多个哈希函数,将一个数据映射到位图结构中。此种方式不仅可以提升查询效率,也可以节省大量的内存空间。

小Tips:布隆过滤器如果判断出不再那么一定是不再,如果判断出在那么有可能是误判。因为在或不再分别是用 1 和 0 来标记的,如果不再那么标记位为 0,一定是真的。如果在,说明标记位是 1,这个 1 并不可信,因为这个 1 有可能是其它数据映射到这里来的,将该比特位置为 1。这个问题无法完全解决,只能通过增加哈希函数,让一个数据映射多个比特位,来尽最大的努力避免冲突发生,依此降低误判率。这里给大家分享一篇关于布隆过滤器的文章:详解布隆过滤器的原理,使用场景和注意事项。感兴趣的小伙伴可以去看看。
2.3 布隆过滤器的插入

//Bloom.h
struct BKDRHash
{
size_t operator()(const string& str)
{
register size_t hash = 0;
for (auto e : str)
{
hash = hash * 131 + e; // 也可以乘以31、131、1313、13131、131313..
// 有人说将乘法分解为位运算及加减法可以提高效率,如将上式表达为:hash = hash << 7 + hash << 1 + hash + ch;
// 但其实在Intel平台上,CPU内部对二者的处理效率都是差不多的,
// 我分别进行了100亿次的上述两种运算,发现二者时间差距基本为0(如果是Debug版,分解成位运算后的耗时还要高1/3);
// 在ARM这类RISC系统上没有测试过,由于ARM内部使用Booth's Algorithm来模拟32位整数乘法运算,它的效率与乘数有关:
// 当乘数8-31位都为1或0时,需要1个时钟周期
// 当乘数16-31位都为1或0时,需要2个时钟周期
// 当乘数24-31位都为1或0时,需要3个时钟周期
// 否则,需要4个时钟周期
// 因此,虽然我没有实际测试,但是我依然认为二者效率上差别不大
}
return hash;
}
};
struct APHash
{
size_t operator()(const string& str)
{
register size_t hash = 0;
for (size_t i = 0; i < str.size(); i++)
{
size_t ch = str[i];
if ((i & 1) == 0)
{
hash ^= ((hash << 7) ^ ch ^ (hash >> 3));
}
else
{
hash ^= (~((hash << 11) ^ ch ^ (hash >> 5)));
}
}
return hash;
}
};
struct DJBHash
{
size_t operator()(const string& str)
{
register size_t hash = 5381;
for (auto ch : str)
{
hash += (hash << 5) + ch;
}
return hash;
}
};
namespace wcy
{
template<size_t N, class K = string
,class HashFunc1 = BKDRHash
,class HashFunc2 = APHash
,class HashFunc3 = DJBHash>
class bloomfilter
{
public:
void set(const K& key)
{
size_t hash1 = HashFunc1()(key) % N;
_bs.set(hash1);
size_t hash2 = HashFunc2()(key) % N;
_bs.set(hash2);
size_t hash3 = HashFunc3()(key) % N;
_bs.set(hash3);
cout << hash1 << ' ' << hash2 << ' ' << hash3 << endl;
}
bool test(const K& key)
{
size_t hash1 = HashFunc1()(key) % N;
size_t hash2 = HashFunc2()(key) % N;
size_t hash3 = HashFunc3()(key) % N;
if (!_bs.test(hash1) || !_bs.test(hash2) || !_bs.test(hash3))
{
return false;//100%准确
}
return true;//存在误判
}
private:
bitset<N> _bs;
};
}
//test.cpp
void Test()
{
wcy::bloomfilter<100> bf;
bf.set("孙悟空");
bf.set("牛魔王");
bf.set("猪八戒");
bf.set("二郎神");
cout << bf.test("孙悟空") << endl;
cout << bf.test("猪八戒") << endl;
cout << bf.test("沙悟净") << endl;
}
int main()
{
Test();
return 0;
}

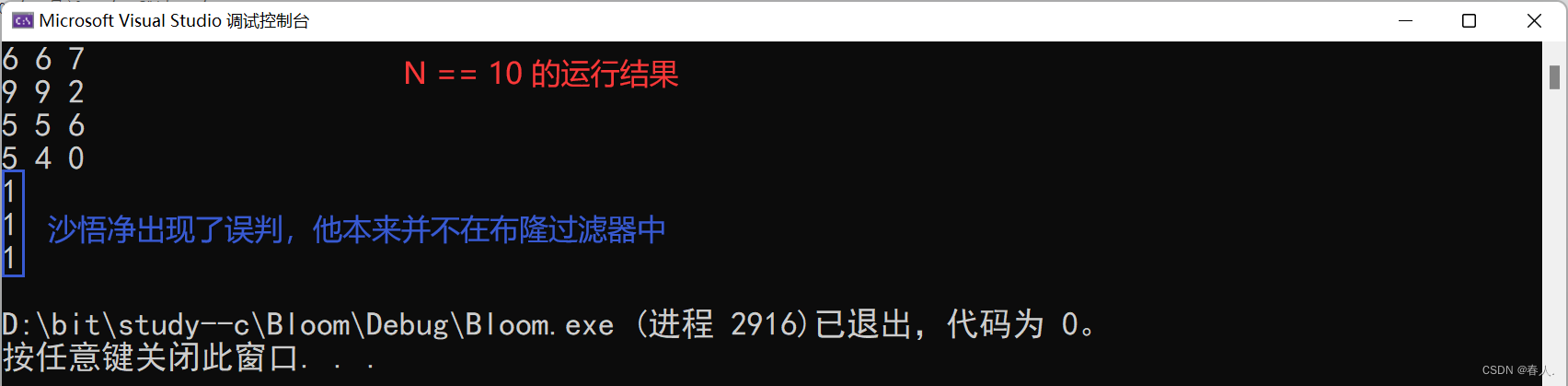
小Tips:由上面的两次运行结果可以看出,影响布隆过滤器的一个重要因素就是 N 的大小,这里的 N 表示底层位图要开辟 N 个比特位。N 越大意味着比特位越多,冲突的概率就会下降,布隆过滤器的误判率就会跟着下降,但是空间利用率也会下降。相反,N 越小空间利用率就会提升,但是冲突就会越多,布隆过滤器的误判率就会上升。那 N 到底多大合适呢?在程序中我们可以利用哈希中的那一套理论,即通过负载因子去控制 N 的大小。

小Tips:上图中 k 为哈希函数个数,m 为布隆过滤器长度,n 为插入的元素个数,p 为误判率。通过上图可以发现,影响布隆过滤器误判率的最主要因素还是哈希函数的个数,在增加了哈希函数的个数后,误判率有了明显的下降。
2.4 布隆过滤器的查找
布隆过滤器的思想是将一个元素用多个哈希函数映射到一个位图中,因此被映射到的位置的比特位一定为 1。所以可以按照以下方式进行查找:首先计算出每个哈希函数对应的哈希值,再去查看该哈希值对应的比特位置存储的是否为零,只要有一个为零,代表该元素一定不在布隆过滤器中,否则可能在布隆过滤器中。
注意:布隆过滤器如果说某个元素不在时,该元素一定不存在,如果布隆过滤器说该元素存在时,那么该元素可能存在,因为有一些哈希函数值存在一定的冲突,导致最终的误判。
例如:在布隆过滤器中查找 “沙悟净”时,假设 3 个哈希函数计算的哈希值为:1、3、7,刚好和其他元素对应的比特位重叠,此时布隆过滤器告诉该元素存在,但实际该元素是不存在的。
2.5 布隆过滤器的删除
布隆过滤器不能直接支持删除操作,因为在删除一个元素时,可能会影响其它元素。
例如:删除删除上面程序中的 “猪八戒”,如果直接将该元素所对应的二进制比特位置 0,那么 “二郎神” 也被删除了,因为这两个元素经过 HashFunc1 计算出来的结果是一样的,这就导致他俩对应的比特位会发生重叠。
一种正确的删除方法:将布隆过滤器中的每个比特位扩展成一个小的计数器,插入元素时给 k 个计数器(k个哈希函数计算出的哈希地址)加一,删除元素时,给 k 个计数器减一,通过多占用几倍存储空间的代价来给布隆过滤器增加删除操作。
缺陷:
-
无法确认元素是否真正在布隆过滤器中
-
存在计数回绕
2.6 布隆过滤器的优点
-
添加和查询的元素的时间复杂度是: O ( K ) O(K) O(K)(K 是哈希函数的个数,一般比较小),与数据量大小无关。
-
哈希函数相互之间没有关系,方便硬件并行运算。
-
布隆过滤器不需要存储元素本身,在某些对保密要求比较严格的场合有很大优势。
-
在能够承受一定的误判时,布隆过滤器与其他数据结构相比有着很大的空间优势。
-
在数据量很大的时候,布隆过滤器可以表示全集,其他数据结构不能。
-
使用同一组哈希函数的布隆过滤器可以进行交、并、差运算。
2.7 布隆过滤器的缺陷
-
有误判率,即存在假阳性(False Position),即不能准确判断元素是否在集合中(补数方法:再建立一个白名单,存储可能会误判的数据)。
-
不能获取元素本身。
-
一般情况下不能从布隆过滤器中删除元素。
-
如果采用计数方式删除,可能会存在计数回绕的问题。
2.8 布隆过滤器的实际应用场景
不需要精确的场景,比如快速判断昵称是否注册过。用户在注册账号时,输入一个昵称,在后端的数据库中要能够快速判断出该昵称是否已经存在数据库中,若存在说明该昵称已经被其他人注册过了。此时,就可以将数据库中的所有昵称都放到布隆过滤器中,若布隆过滤器判断出不在,那一定是不在,若布隆过滤器判断出在那可能是误判,我们可以通过负载因子来控制误判率,且这种误判影响不大。如果要精确判断,可以对上面的方式进行优化,若布隆过滤器判断出不在,那此结果一定是准确的,直接返回即可,若布隆过滤器判断的结果是存在,此时可以拿着该昵称到数据库中去搜索一遍,以数据库的查询结果返回给用户。
三、哈希切分
题目:给两个文件 A 和 B,分别有100亿个query,我们只有1G内存,如何找到两个文件交集?分别给出精确算法和近似算法。
思路一:首先假设 一个 query 占用 30Byte,那么100亿个 query 就会占用3000亿Byte,1G近似10亿Byte,所以3000亿Byte差不多就是300G。这里直接去遍历 A 中的元素再到 B 中去查找是不现实的,我们可以将这两个大文件分成若干份小文件,这里就将每个文件按照大小平均分成1000个小文件(A0~A999、B0~B999),这样以来每个小文件的大小就是300MB,然后我们可以依次拿着A0~A999这1000个小文件,去和B0~B999这1000个小文件进行对比,有相同的就放进交集。但是这样做的问题在于,A0~A999的每一个小文件都要和B的所有小文件对比一遍,这样效率也十分的低。所以下面我们引出哈希切分的方法。
思路二(哈希切分):大思路上还是将 A 和 B 这两个大文件进行切分。但是并不再按照上面的内存大小进行平均切分,而是采用哈希切分。所谓哈希切分就是:根据一个哈希函数去计算确定将该元素划分到哪一个小文件里,可以采取下面这个公式进行计算: h a s h i = H a s h F u n c ( q u e r y ) hashi = HashFunc(query) hashi=HashFunc(query) % 1000 1000 1000。最终每个文件中存放的都是 hashi 相同的元素,这里的一个小文件就类似于一个哈希桶,里面的这些元素只有两种可能:重复、冲突。将 A 和 B 文件都采取相同的方式进行划分,最终 A 和 B 中相同的 query 一定会分别进入 Ai 和 Bi 编号相同的小文件。接下来我们只需要去对比 Ai 和 Bi 即可,这样效率会大大提高。这种做法还是存在一些小问题,有可能出现一个小文件中数据过多的情况,这样就不满足题目中的内存要求了。一个小文件中数据过多有以下两种情形:
-
比如 Ai 有 5G 数据,其中有 4G 都是相同的 query(即重复数据),还有 1G 是不同的 query(即冲突数据)。
-
基本上都是不同的数据(即冲突数据)。
针对这两种情形提出以下解决方案:
-
先把 Ai 的 query 读到一个 set 里面,如果 set 的 insert 报错抛异常(bad_alloc,内存错误),那么就说明该小文件中大多数 query 都是不相同的(即冲突)。如果能够全部读出来,insert 到 set 里面,那么说明 Ai 里面大部分都是相同的 query(这里利用了 set 可以去重的机制)
-
如果抛异常,说明有大量冲突,就再换一个哈希函数,进行二次切分。
小Tips:这道题目和 1.4.2 不同。这道题中的 query 不是整数,不适合使用位图来解决。使用哈希切分的目的就是为了满足内存限制,切分后再使用 set,对小文件的数据做进一步处理,如果小文件中都是重复的数据,set 会起到去重的作用,如果小文件中都是不相同的冲突数据,set 会抛异常,那么我们就再找一个哈希函数对该小文件继续切分。最终再用 set 去查找在不在,这样还可以做到精确查找。要做近似查找,直接使用布隆过滤器即可。
题目:给一个超过100G大小的log file, log中存着IP地址, 设计算法找到出现次数最多的IP地址?
思路:这道题还是采取哈希切分的方法去完成。用一个哈希函数将 100G 大小的文件分成若干份小文件,相同的 IP 一定会被划分到同一个小文件中,然后再用一个 map 去统计出每一个小文件中 IP 出现的次数。记录下出现次数最多的即可。
四、结语
今天的分享到这里就结束啦!如果觉得文章还不错的话,可以三连支持一下,春人的主页还有很多有趣的文章,欢迎小伙伴们前去点评,您的支持就是春人前进的动力!




![[Mac软件]Infuse 7 PRO v7.6.3 一个强大的视频播放器(激活版)](https://img-blog.csdnimg.cn/dcdcfd66dbad46589325d60000e43627.png)