1.角度测量方法
依据:电磁波的直线传播和雷达天线的方向性。
分类:振幅法测角、相位法测角
1.1 相位法测角
相位法测角利用多个天线所接收回波信号之间的相位差进行测角。如下图所示;
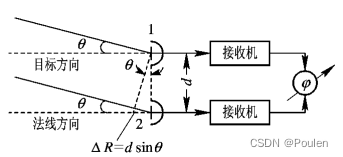
设在θ方向有一远区目标,则到达接收点的目标所反射的电磁波近视为平面波。由于两天线间距为d,故它们所收到的信号存在波程差∆𝑅,而产生一相位差,由图可知:

其中λ为雷达波长。如用相位计进行比相,测出其相位差为φ,就可以确定目标方向θ0。
1.1.1 测角误差(精度)与多值性问题
相位差φ值测量不准,将产生测角误差,它们之间的关系如下(对上式相位差两边取微分):
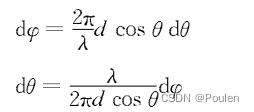
式中可以看出,采用读数精度高的相位计,或减小𝜆/𝑑的值(增大𝑑/𝜆值),均可以提高测角精度。也注意到:当θ=0时,即目标处在天线法线方向时,测角误差dθ最小。当θ增大,dθ也增大,为保证一定的测角精度,θ的范围有一定的限制。
增大d/λ虽然可提高测角精度,但根据式(1)可知,在感兴趣的θ范围(测角范围)内,当d/λ加大到一定程度时,φ值可能超过2π,此时φ=2𝜋𝑁+𝜓,其中N为整数;ψ<2𝜋,而相位计实际读数为ψ值。由于N未知,因而真实的φ值不能确定,就出现多值(角度模糊)问题。必须解决多值性问题(解角度模糊),即只有判定N值才能确定目标方向。比较有效的办法就是利用三天线测角设备,间距大的1、3天线用来得到高精度测量,而间距小的1、2天线用来解决多值性。如图所示;
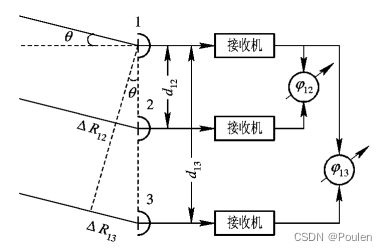
设目标在θ方向。天线1、2之间的距离为d12,天线1、3之间的距离为d13,适当选择d12,使1、2收到的信号之间的相位差在测角范围内均满足:

𝜑12由相位计1读出。根据要求,选择较大的d13,则天线1、3收到的信号的相位差为:

𝜑13由相位计2读出,但实际读数是小于2π的ψ。为了确定N值,可利用如下关系:

根据相位计1读数𝜑12可算出来𝜑13,但𝜑12包含由相位计的读数误差,由式(4)标出的𝜑13具有的误差为相位计误差的𝑑13/𝑑12倍,它只是式(3)的近似值,只要𝜑12的读数误差值不大,就可用它确定N,即把(𝑑13/𝑑12)𝜑12除2π,所得商的整数部分就是N值。然后由式(3)算出𝜑13并确定θ。由于𝑑13/𝜆值较大,保证了所要求的测角精度。
1.2 振幅法测角
振幅法测角是用天线收到的回波信号幅度值来做角度测量的,该幅度值的变化规律取决于天线方向图以及天线扫描方式。主要分为:
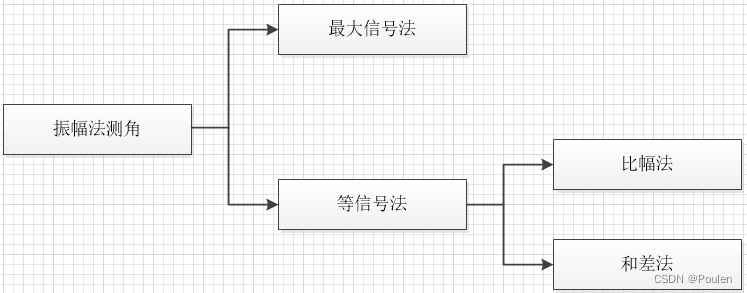
1.2.1 最大信号法
当天线波束作圆周扫描或在一定扇形范围内作匀角速扫描时,对收发共用天线的单基地脉冲雷达而言,接收机输出的脉冲串幅度值被天线双程方向图函数所调制。找出脉冲串的最大值(中心值),确定该时刻波束轴线指向即为目标所在方向。通俗来说,就是通过转动天线波束方向,当波束中心对准目标时,目标回波功率(幅度)最大,此时通过确定最大值对应的波束指向即为目标所在角度。
最大信号法测角的优点:1.简单易于实现;2.用天线方向图的最大值方向测角,此时回波最强,故信噪比最大,对检测发现目标是有利的。
最大信号法测角的缺点:1.直接测量时精度不是很高,约为波束半功率宽度(𝜃0.5)的20%左右。2.由于方向图最大值附近比较平坦,最大点不易判别,测量方法改进后可提高精度。3.不能判别目标偏离波速轴线的方向,故不能用于自动测角。
最大信号法测角用途:广泛用于搜素、引导雷达。
1.2.2 等信号法
等信号法测角采用两个相同且彼此部分重叠的波束,其方向如下图所示。如果目标处在两个波束的交叠轴OA方向,则由两个波束收到的信号强度相等,否则一个波束收到的信号强度高于另一个。故常常称OA为等信号轴。当两个波束收到的回波信号相等时,等信号轴所指方向即为目标方向。如果目标处在OB方向,波束2的回波比波束1的强,处在OC方向时,波束2的回波较波束1的弱,因此,比较两个波束回波的强弱就可以判断目标偏离等信号轴的方向,并可用查表的办法估计出偏离等信号轴的大小。
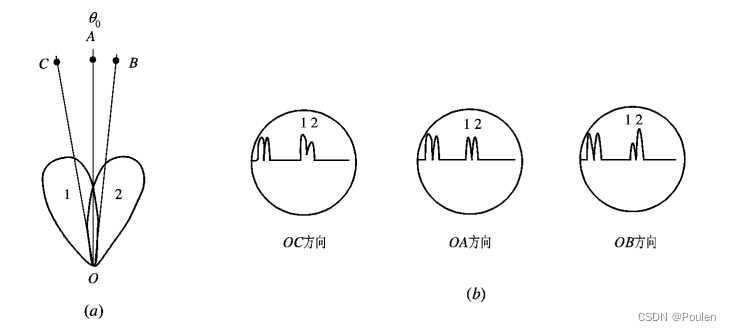
设天线电压方向性函数为F(θ),等信号轴OA的指向为θ0,则波束1、2的方向性函数可分别写成:

𝜃𝑘为𝜃0与波束最大值方向的偏角。
用等信号法测量时,波束1接收到的回波信号𝑢1=𝐾𝐹1(𝜃)=𝐾𝐹(𝜃𝑘−𝜃𝑡),波束2收到的回波电压值为𝑢2=𝐾𝐹2(𝜃)=𝐾𝐹(𝜃𝑘+𝜃𝑡),式中𝜃𝑡为目标方向偏离等信号轴𝜃0的角度。对𝑢1和𝑢2信号进行处理,可以获得目标𝜃𝑡的信息。

等信号法中,两个波束可以同时存在,若用两套相同的接收系统同时工作,则称同时波瓣法;两波束也可以交替出现,或只要其中一个波束,使它绕OA轴旋转,波束便按时间顺序在1、2位置交替出现,只要用一套接收系统工作,则称为顺序波瓣法。
1.2.2.1 比幅法
两信号幅度的比值
根据比值的大小可以判断目标偏离𝜃0的方向,查找预先制定的表格就可估计出目标偏离𝜃0的数值。值得注意的是,比幅法中,只有𝜃𝑡是未知数,𝜃𝑘为固定常数。
1.2.2.2 和差法(了解即可)
由𝑢1及𝑢2可求得其差值∆(𝜃𝑡)及和值∑(𝜃𝑡),即
![]()
在等信号轴θ=𝜃0附近泰勒展开得到差值的近似表达为:
而和信号为
![]()
同理,在θ=𝜃0泰勒展开:
![]()
于是联合和差值,即可判断目标偏离𝜃0的方向大小,

因为Δ/∑正比于目标偏离𝜃0的角度𝜃𝑡,故可用它来判读角度𝜃𝑡的大小及方向。
1.2.2.3 等信号法优缺点
优点:
1.测角精度比最大信号法高,因为等信号轴附近方向图斜率较大,目标略微偏离等信号轴时,两信号强度变化较显著。由理论分析可知,对收发共用天线的雷达,精度约为波束半功率宽度的2%,比最大信号法高约一个量级。
2.根据两个波束收到的信号的强弱可判别目标偏离等信号轴的方向,便于自动测角。
缺点:
1.测角系统较复杂;
2.等信号轴方向不是方向图最大值方向,故在发射功率相同的条件下,作用距离比最大信号法小些。若两波束交点选择在最大值的0.7~0.8处,则对收发共用天线的雷达,作用距离比最大信号法减小约20%~30%。
应用:
等信号法常用来进行自动测角,即应用于跟踪雷达中。
2.角度分辨率
雷达角度(方位角、俯仰角)分辨率取决于波束宽度。影响雷达角度分辨率的主要因素包括以下几个:
1.雷达天线的孔径大小:天线孔径越大,其发射和接收波束的主瓣越窄,从而提高了角度分辨率。
2.雷达的工作频率:频率越高,波长越短,相应的波束宽度也会变窄,从而提高了角度分辨率。
3.雷达系统的信号处理能力:高性能的信号处理算法和硬件可以有效地抑制杂散信号和噪声,提高角度分辨率。
4.目标与背景的信号差异:如果目标与背景之间的信号差异较大,那么可以更容易地将目标从背景中分离出来,从而提高角度分辨率。
5.目标距离:较远的目标可能会由于角度扩展效应而降低角度分辨率。
需要注意的是,角度分辨率并不仅仅受到单一因素的影响,而是由多个因素综合作用的结果。不同雷达系统的设计和工作条件也会导致不同的角度分辨率表现。
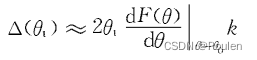
3.角度测量精度
对于角度的测量,k与孔径照射函数A(x)有关,Δ𝑀是方位或仰角的波束宽度。若天线的半功率波束宽度为𝜃3𝑑𝐵,则方位或仰角的测量精度为;

总结:雷达测距、测速以及测角的精度与它们的分辨率成正比,分辨率越高,精度越高。
4.角度测量算法
4.1 3DFFT
4.1.1 3DFFT原理
目标距离的微小变化会导致range-FFT峰值的相位变化。角度估计至少需要2个RX天线。从目标到每个天线的差分距离Δd导致FFT峰值发生相位变化,该相位变化用于估计到达角。
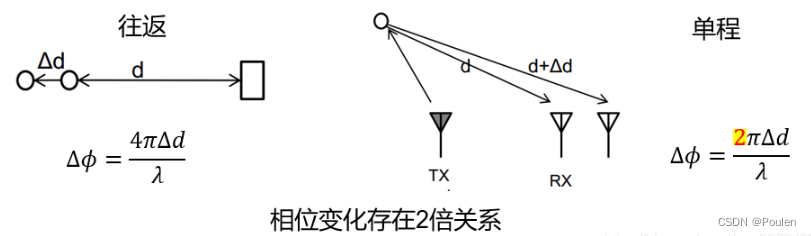

由于相位变化与距离间的关系:
假设天线间距离为d,则∆𝑑=𝑙𝑠𝑖𝑛(𝜃),因此可估算出到达角(DOA)为:

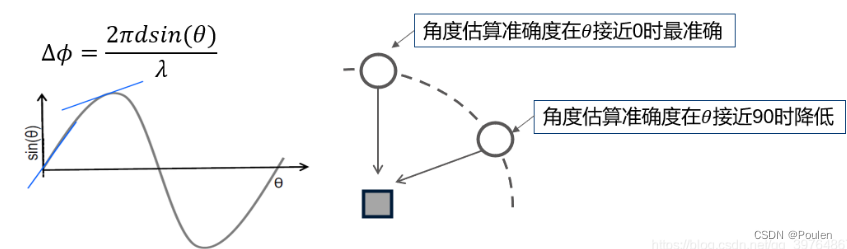
4.1.2 3DFFT估算准确度(精度)
由于∆𝜙取决于sin(θ),是一种非线性的依赖关系,因此当θ接近0°时,角度的估算精度较高,θ接近90°时,估算精度降低。
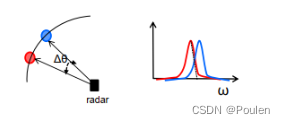
4.1.3 3DFFT最大不模糊角度
雷达的最大角视场由雷达可以估算的最大AOA来界定。当Δ𝜙>𝜋时,就会产生角度模糊,如下图所示:

因此要求:

4.1.4 3DFFT角度分辨率
角度分辨率(Θ𝑟𝑒𝑠)是两个物体在ange-FFT中作为单独峰值出现的最小角度的问题
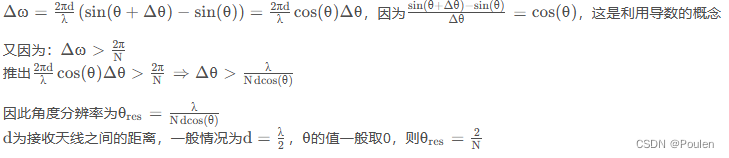
总结:3DFFT在FMCW雷达中,原理就是利用不同通道间(即不同接收天线)的波程差通过在天线方向进行FFT求得其角度,即相位法测角。
4.2 阵列信号处理相关DOA估计
1.Capon
2.Music
3.Esprit(借助旋转不变性的信号参数估计技术)
未完待续。
5.总结
有关阵列信号处理DOA估计内容,可以观看本人DOA估计算法专栏,本人会不定期更新。另外,创作不易,望各位多多支持。
参考资料:
雷达原理(丁鹭飞版)