Newton-Raphson Method
Linear vs Nonlinear Analysis:
- At this point, we can conduct a linear analysis no problem
∫ ∑ i , j = 1 3 σ i j ε i j ∗ d v = ∫ t n ⋅ u ∗ d s + ∫ ρ b ⋅ u ∗ d v ⇒ ∫ e [ B ] T [ C ] [ B ] d x ⏟ k e u e = ∫ ∂ e [ N ] T t n d s + ∫ e [ N ] T ρ b d v \begin{aligned} &\int \sum_{i,j=1}^3\sigma_{ij}\varepsilon_{ij}^*dv=\int t_n\cdot u^*ds + \int \rho b \cdot u^*dv \\ \Rightarrow &\underbrace{\int_e[B]^T[C][B]dx}_{k_e}u_e=\int_{\partial e}[N]^Tt_n ds + \int_e[N]^T\rho b dv \end{aligned} ⇒∫i,j=1∑3σijεij∗dv=∫tn⋅u∗ds+∫ρb⋅u∗dvke ∫e[B]T[C][B]dxue=∫∂e[N]Ttnds+∫e[N]Tρbdv
- Two Assumption:
(1) Small Deformations
(2) Linear Elastic Materials
- This allowed us to solve our system using a system of linear equations:
[ K ] [ u ] = [ F ] \begin{aligned} [K] [u] = [F] \end{aligned} [K][u]=[F]
- Unfortunately, the world is a cruel place and the majority of realistic scenarios require a nonlinear analysis:
Stress-Strain Relationship:
∫
∑
i
,
j
=
1
3
σ
i
j
ε
i
j
∗
d
v
\begin{aligned} &\int \sum_{i,j=1}^3\sigma_{ij}\varepsilon_{ij}^*dv \end{aligned}
∫i,j=1∑3σijεij∗dv
t n t_n tn and ρ b \rho b ρb are solution dependent:
∫ t n ⋅ u ∗ d s + ∫ ρ b ⋅ u ∗ d v \begin{aligned} \int t_n\cdot u^*ds + \int \rho b \cdot u^*dv \end{aligned} ∫tn⋅u∗ds+∫ρb⋅u∗dv
Types of Nonlinearities
There are many types of nonlinearities:
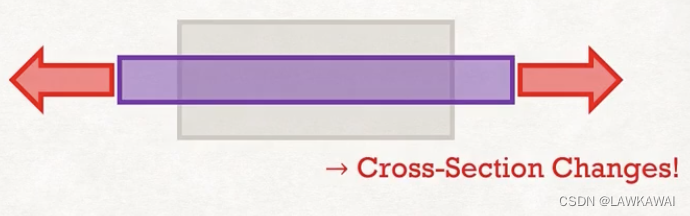
1. Geometric Nonlinearity
- Buckling
- Large deformation of the material
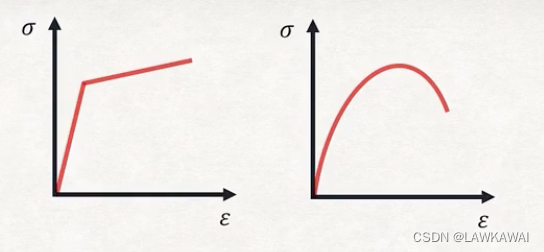
2. Material Nonlinearity
- Plasticity
- Damage
3. Kinematic Nonlinearity
- Contact

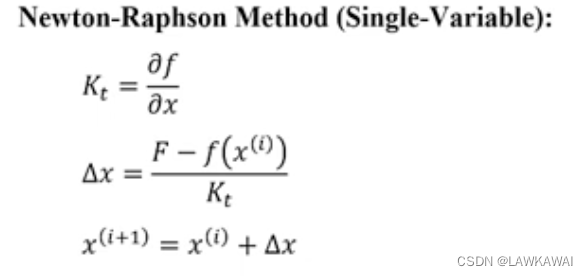
Newton-Raphson Method (Single Variable)
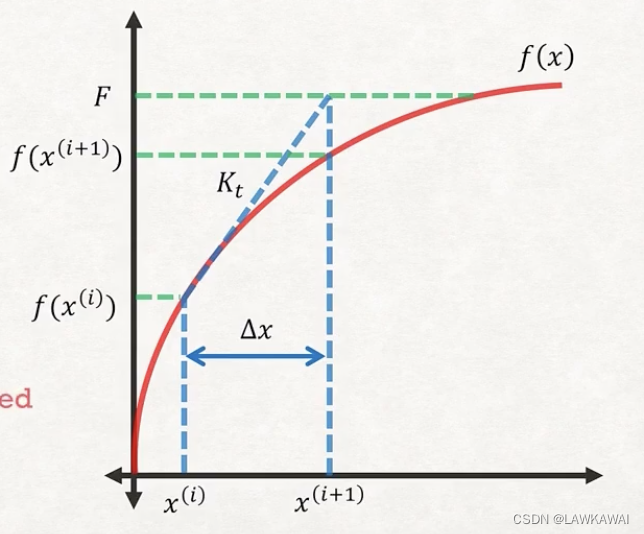
To solve nonlinear equations we typically employ the Newton-Raphson method (also referred to as Newton’s method). To see how this method works, let’s examine a single variable scenario:
If we hace a continuous function f f f, we can perform a Taylor series expansion:
f ( x ( i + 1 ) ) ≈ f ( x ( i ) ) + ∂ f ( x ( i ) ) ∂ x ( x ( i + 1 ) − x ( i ) ) + 1 2 ! ( ∂ 2 f ( x ( i ) ) ∂ x 2 ) ( x ( i + 1 ) − x ( i ) ) + . . . \begin{aligned} f(x^{(i+1)})\approx f(x^{(i)})+\frac{\partial f(x^{(i)})}{\partial x}(x^{(i+1)}-x^{(i)})+\frac{1}{2!}(\frac{\partial ^2f(x^{(i)})}{\partial x^2})(x^{(i+1)}-x^{(i)})+... \end{aligned} f(x(i+1))≈f(x(i))+∂x∂f(x(i))(x(i+1)−x(i))+2!1(∂x2∂2f(x(i)))(x(i+1)−x(i))+...
Neglecting higher-order terms:
f ( x ( i + 1 ) ) ≈ f ( x ( i ) ) + ∂ f ( x ( i ) ) ∂ x ( x ( i + 1 ) − x ( i ) ) \begin{aligned} f(x^{(i+1)})\approx f(x^{(i)})+\frac{\partial f(x^{(i)})}{\partial x}(x^{(i+1)}-x^{(i)}) \end{aligned} f(x(i+1))≈f(x(i))+∂x∂f(x(i))(x(i+1)−x(i))
Rearrange equation:
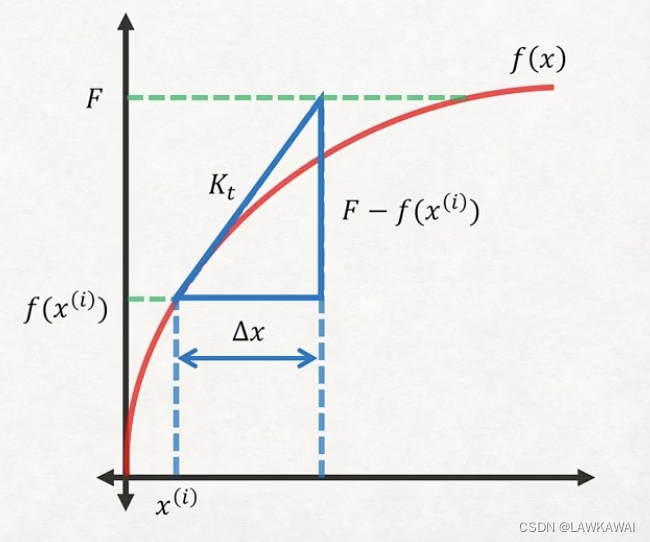
( x ( i + 1 ) − x ( i ) ) = ( f ( x ( i + 1 ) ) − f ( x ( i ) ) ) f ′ ( x ( i ) ) Δ x = ( x ( i + 1 ) − x ( i ) ) K t = f ′ ( x ( i ) ) \begin{aligned} (x^{(i+1)}-x^{(i)})&=\frac{(f(x^{(i+1)}) - f(x^{(i)}))}{f'(x^{(i)})} \\ \Delta x &= (x^{(i+1)}-x^{(i)}) \\ K_t &= f'(x^{(i)}) \end{aligned} (x(i+1)−x(i))ΔxKt=f′(x(i))(f(x(i+1))−f(x(i)))=(x(i+1)−x(i))=f′(x(i))
Simply equation:
Δ x = F − f ( x ( i ) ) K t = K t − 1 ( F − f ( x ( i ) ) ) \begin{aligned} \Delta x &=\frac{F- f(x^{(i)})}{K_t} = K_t^{-1}(F-f(x^{(i)})) \end{aligned} Δx=KtF−f(x(i))=Kt−1(F−f(x(i)))
Now let’s examine the parameters of the equation:
F
=
F =
F= Desired Value
x
i
=
x^{i} =
xi= Initial Value of
x
x
x
f
(
x
(
i
)
)
=
f(x^{(i)}) =
f(x(i))= Initial Value of the Function
K
t
=
K_t =
Kt= Slope of the Tangent Line
Δ
x
=
\Delta x=
Δx= Increment in
x
x
x : solve it
In FEA:
- F − f ( x ( i ) ) = F - f(x^{(i)})= F−f(x(i))= Different between applied forces ( F ) (F) (F) and internal forces ( f ( x ( i ) ) ) (f(x^{(i)})) (f(x(i)))
- Δ x = \Delta x = Δx= Displacement increment
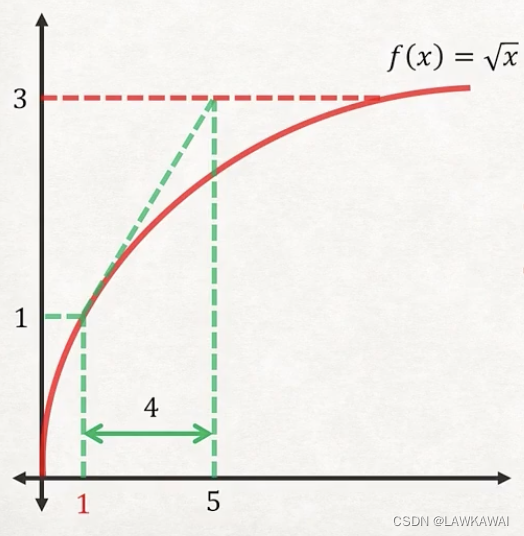
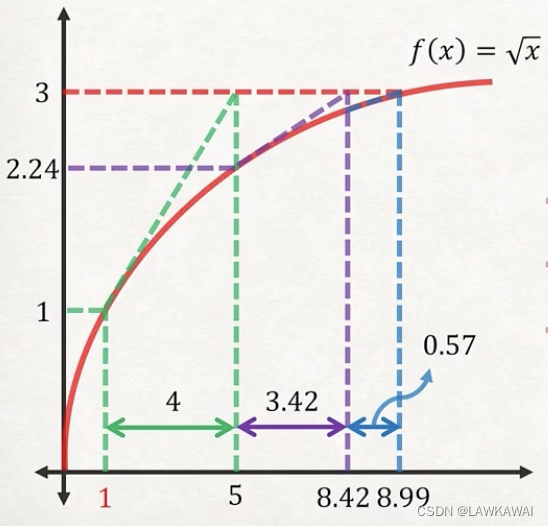
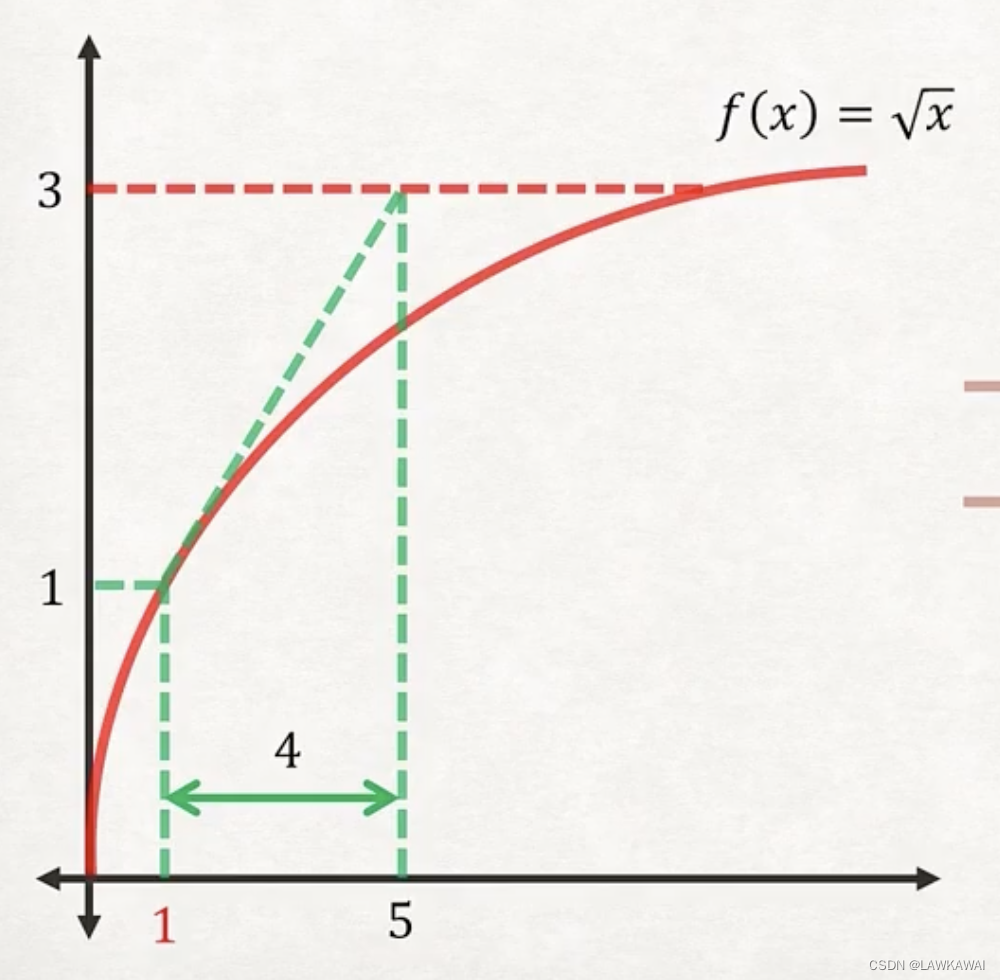
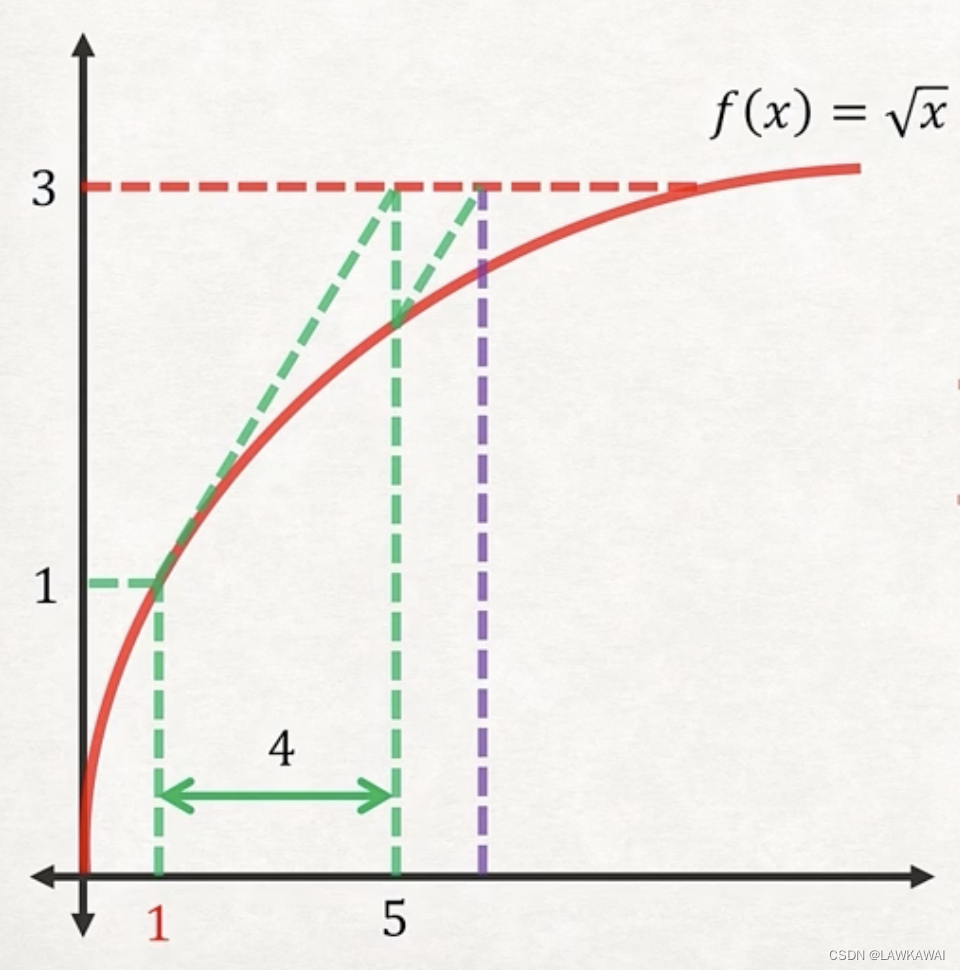
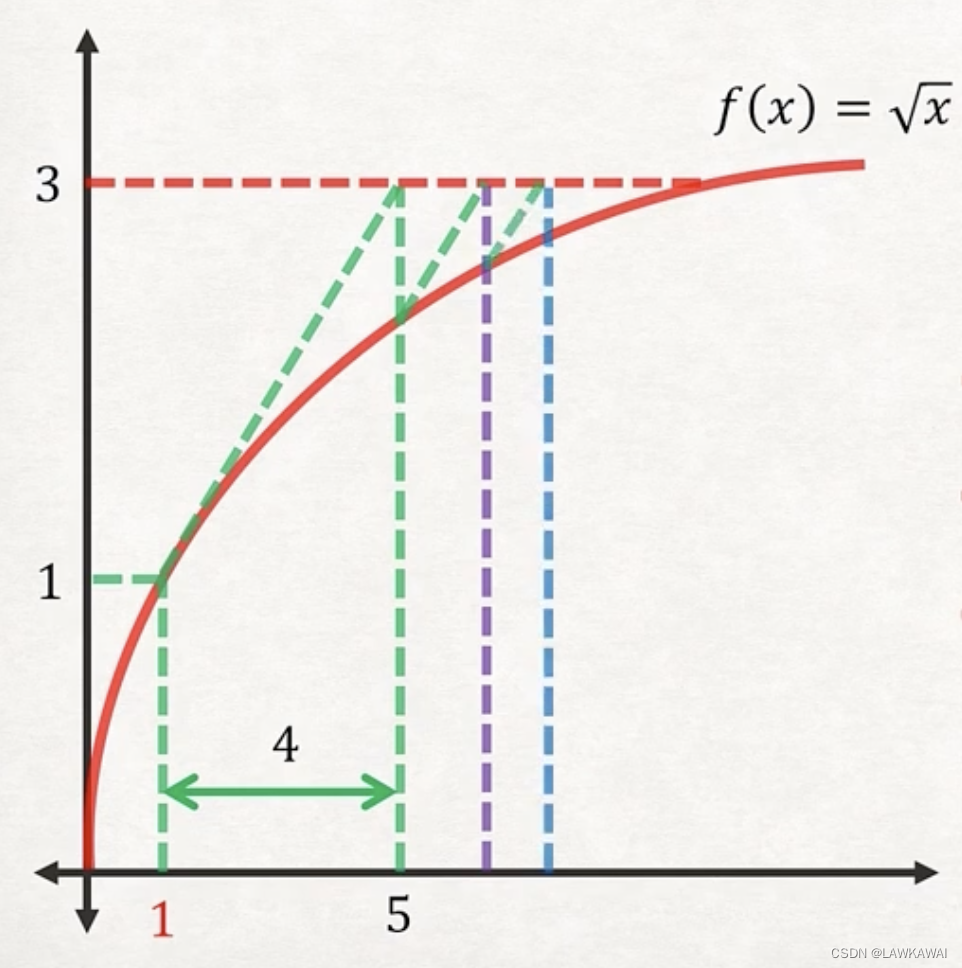
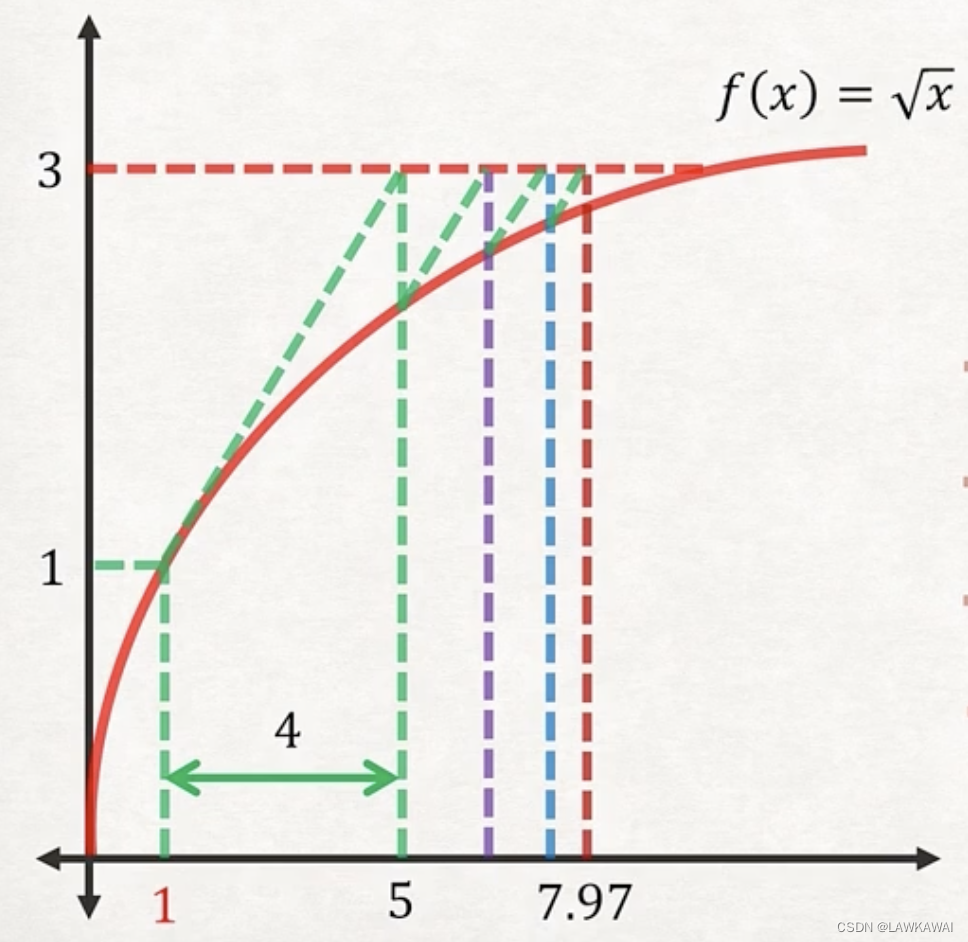
Example 1 - Single Variable Newton-Raphson Method
If f ( x ) = x f(x) = \sqrt{x} f(x)=x, find x x x such that f ( x ) = 3 f(x) = 3 f(x)=3
Function Information:
f ( x ) = x ⇒ K t = ∂ f ∂ x = 1 2 x \begin{aligned} f(x) = \sqrt{x} \Rightarrow K_t = \frac{\partial f}{\partial x} = \frac{1}{2\sqrt{x}} \end{aligned} f(x)=x⇒Kt=∂x∂f=2x1
Δ x = K t − 1 ( F − f ( x ( i ) ) ) \Delta x =K_t^{-1}(F-f(x^{(i)})) Δx=Kt−1(F−f(x(i)))
| x ( i ) x^{(i)} x(i) | f ( x ( i ) ) f(x^{(i)}) f(x(i)) | K t K_t Kt | Δ x \Delta x Δx | x ( i + 1 ) x^{(i+1)} x(i+1) |
|---|---|---|---|---|
| 1 | 1 | 0.5 | 4 | 5 |
Δ x = K t − 1 ( F − f ( x ( i ) ) ) = ( 0.5 ) − 1 ( 3 − 1 ) = 4 \Delta x =K_t^{-1}(F-f(x^{(i)})) =(0.5)^{-1}(3-1)=4 Δx=Kt−1(F−f(x(i)))=(0.5)−1(3−1)=4
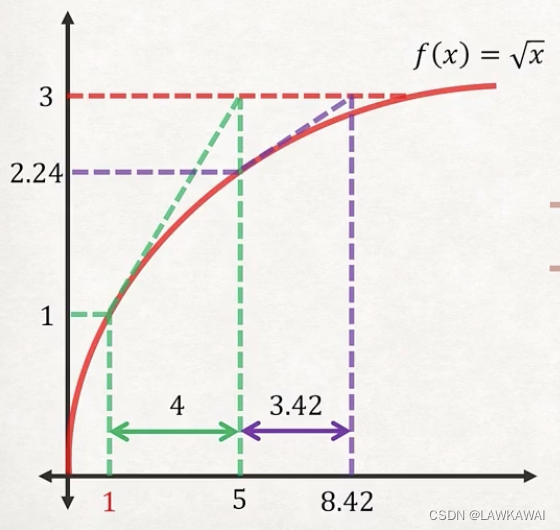
| x ( i ) x^{(i)} x(i) | f ( x ( i ) ) f(x^{(i)}) f(x(i)) | K t K_t Kt | Δ x \Delta x Δx | x ( i + 1 ) x^{(i+1)} x(i+1) |
|---|---|---|---|---|
| 1 | 1 | 0.5 | 4 | 5 |
| 5 | 2.24 | 0.22 | 3.42 | 8.42 |
| x ( i ) x^{(i)} x(i) | f ( x ( i ) ) f(x^{(i)}) f(x(i)) | K t K_t Kt | Δ x \Delta x Δx | x ( i + 1 ) x^{(i+1)} x(i+1) |
|---|---|---|---|---|
| 1 | 1 | 0.5 | 4 | 5 |
| 5 | 2.24 | 0.22 | 3.42 | 8.42 |
| 8.42 | 2.90 | 0.17 | 0.57 | 8.99 |
Newton-Raphson Method (Multi-Variable)
Unfortunately, most scenarios (especially finite element) involve many multi-variable equations:
f 1 ( x 1 , x 2 , . . . , x n ) = 0 f 2 ( x 1 , x 2 , . . . , x n ) = 0 ⋮ f n ( x 1 , x 2 , . . . , x n ) = 0 f_1(x_1, x_2, ..., x_n) = 0 \\ f_2(x_1, x_2, ..., x_n) = 0 \\ \vdots \\ f_n(x_1, x_2, ..., x_n) = 0 f1(x1,x2,...,xn)=0f2(x1,x2,...,xn)=0⋮fn(x1,x2,...,xn)=0
We can perform the Taylor series expansion for each equation:
f 1 ( x 1 ( i + 1 ) , x 2 ( i + 1 ) , . . . , x n ( i + 1 ) ) ≈ f 1 ( x 1 ( i ) , x 2 ( i ) , . . . , x n ( i ) ) + ∂ f 1 ∂ x 1 ∣ x ( i ) ( x 1 ( i + 1 ) − x 1 ( i ) ) + ∂ f 1 ∂ x 2 ∣ x 2 ( i ) ( x ( i + 1 ) − x 2 ( i ) ) + ⋯ + ∂ f 1 ∂ x n ∣ x n ( i ) ( x ( i + 1 ) − x n ( i ) ) \begin{aligned} &f_1(x_1^{(i+1)}, x_2^{(i+1)}, ..., x_n^{(i+1)})\approx f_1 (x_1^{(i)}, x_2^{(i)}, ..., x_n^{(i)}) \\ &+ \frac{\partial f_1}{\partial x_1}|_{x^{(i)}}(x_1^{(i+1)}-x_1^{(i)})+ \frac{\partial f_1}{\partial x_2}|_{x_2^{(i)}}(x^{(i+1)}-x_2^{(i)}) + \cdots +\frac{\partial f_1}{\partial x_n}|_{x_n^{(i)}}(x^{(i+1)}-x_n^{(i)}) \end{aligned} f1(x1(i+1),x2(i+1),...,xn(i+1))≈f1(x1(i),x2(i),...,xn(i))+∂x1∂f1∣x(i)(x1(i+1)−x1(i))+∂x2∂f1∣x2(i)(x(i+1)−x2(i))+⋯+∂xn∂f1∣xn(i)(x(i+1)−xn(i))
Writing all the equations in matrix form:
[ f 1 ( x ( i + 1 ) ) f 2 ( x ( i + 1 ) ) ⋮ f n ( x ( i + 1 ) ) ] = [ f 1 ( x ( i ) ) f 2 ( x ( i ) ) ⋮ f n ( x ( i ) ) ] + [ ∂ f 1 ∂ x 1 ∂ f 1 ∂ x 2 ⋯ ∂ f 1 ∂ x n ∂ f 2 ∂ x 1 ∂ f 2 ∂ x 2 ⋯ ∂ f 2 ∂ x n ⋮ ⋮ ⋱ ⋮ ∂ f n ∂ x 1 ∂ f n ∂ x 2 ⋯ ∂ f n ∂ x n ] [ ( x 1 ( i + 1 ) − x 1 ( i ) ) ( x 2 ( i + 1 ) − x 2 ( i ) ) ⋮ ( x n ( i + 1 ) − x n ( i ) ) ] \begin{aligned} \begin{bmatrix} f_1(x^{(i+1)}) \\ f_2(x^{(i+1)}) \\ \vdots \\ f_n(x^{(i+1)}) \end{bmatrix} = \begin{bmatrix} f_1(x^{(i)}) \\ f_2(x^{(i)}) \\ \vdots \\ f_n(x^{(i)}) \end{bmatrix} + \begin{bmatrix} \frac{\partial f_1}{\partial x_1} & \frac{\partial f_1}{\partial x_2} & \cdots & \frac{\partial f_1}{\partial x_n} \\ \frac{\partial f_2}{\partial x_1} & \frac{\partial f_2}{\partial x_2} & \cdots & \frac{\partial f_2}{\partial x_n} \\ \vdots & \vdots & \ddots & \vdots \\ \frac{\partial f_n}{\partial x_1} & \frac{\partial f_n}{\partial x_2} & \cdots & \frac{\partial f_n}{\partial x_n} \end{bmatrix} \begin{bmatrix} (x_1^{(i+1)}-x_1^{(i)})\\ (x_2^{(i+1)}-x_2^{(i)}) \\ \vdots \\ (x_n^{(i+1)}-x_n^{(i)}) \end{bmatrix} \end{aligned} f1(x(i+1))f2(x(i+1))⋮fn(x(i+1)) = f1(x(i))f2(x(i))⋮fn(x(i)) + ∂x1∂f1∂x1∂f2⋮∂x1∂fn∂x2∂f1∂x2∂f2⋮∂x2∂fn⋯⋯⋱⋯∂xn∂f1∂xn∂f2⋮∂xn∂fn (x1(i+1)−x1(i))(x2(i+1)−x2(i))⋮(xn(i+1)−xn(i))
We can move the vector containing the value of the functions at the initial guess to the other side to obtain the following:
[ ∂ f 1 ∂ x 1 ∂ f 1 ∂ x 2 ⋯ ∂ f 1 ∂ x n ∂ f 2 ∂ x 1 ∂ f 2 ∂ x 2 ⋯ ∂ f 2 ∂ x n ⋮ ⋮ ⋱ ⋮ ∂ f n ∂ x 1 ∂ f n ∂ x 2 ⋯ ∂ f n ∂ x n ] [ ( x 1 ( i + 1 ) − x 1 ( i ) ) ( x 2 ( i + 1 ) − x 2 ( i ) ) ⋮ ( x n ( i + 1 ) − x n ( i ) ) ] = [ f 1 ( x ( i + 1 ) ) f 2 ( x ( i + 1 ) ) ⋮ f n ( x ( i + 1 ) ) ] − [ f 1 ( x ( i ) ) f 2 ( x ( i ) ) ⋮ f n ( x ( i ) ) ] \begin{bmatrix} \frac{\partial f_1}{\partial x_1} & \frac{\partial f_1}{\partial x_2} & \cdots & \frac{\partial f_1}{\partial x_n} \\ \frac{\partial f_2}{\partial x_1} & \frac{\partial f_2}{\partial x_2} & \cdots & \frac{\partial f_2}{\partial x_n} \\ \vdots & \vdots & \ddots & \vdots \\ \frac{\partial f_n}{\partial x_1} & \frac{\partial f_n}{\partial x_2} & \cdots & \frac{\partial f_n}{\partial x_n} \end{bmatrix} \begin{bmatrix} (x_1^{(i+1)}-x_1^{(i)})\\ (x_2^{(i+1)}-x_2^{(i)}) \\ \vdots \\ (x_n^{(i+1)}-x_n^{(i)}) \end{bmatrix} = \begin{bmatrix} f_1(x^{(i+1)}) \\ f_2(x^{(i+1)}) \\ \vdots \\ f_n(x^{(i+1)}) \end{bmatrix} - \begin{bmatrix} f_1(x^{(i)}) \\ f_2(x^{(i)}) \\ \vdots \\ f_n(x^{(i)}) \end{bmatrix} ∂x1∂f1∂x1∂f2⋮∂x1∂fn∂x2∂f1∂x2∂f2⋮∂x2∂fn⋯⋯⋱⋯∂xn∂f1∂xn∂f2⋮∂xn∂fn (x1(i+1)−x1(i))(x2(i+1)−x2(i))⋮(xn(i+1)−xn(i)) = f1(x(i+1))f2(x(i+1))⋮fn(x(i+1)) − f1(x(i))f2(x(i))⋮fn(x(i))
or in a more simple form:
[ K ] [ Δ x ] = [ F ] − [ f ( x ( i ) ) ] [K] [\Delta x] = [F] - [f(x^{(i)})] [K][Δx]=[F]−[f(x(i))]
Moving [ K t ] [K_t] [Kt] to the other side:
[ Δ x ] = [ K t ] − 1 ( [ F ] − [ f ( x ( i ) ) ] ) [\Delta x] = [K_t]^{-1}([F]-[f(x^{(i)})]) [Δx]=[Kt]−1([F]−[f(x(i))])
Same as single variable case but now we have vectors and matrices
Convergence Checks:
With multiple variables it is difficult to determine if the method has converged or not. To make things easier, the norm of the vectors is used:
1. Force (and Moment) Convergence:
- Force convergence is achieved when the norm of the vector f ( x ( i ) ) − F f(x^{(i)}) - F f(x(i))−F divided by the norm of vector F F F is less than the specified tolerance e R e_R eR
∣ ∣ f ( x ( i ) ) − F ∣ ∣ ∣ ∣ F ∣ ∣ ≤ e R \frac{||f(x^{(i)})-F||}{||F||} \leq e_R ∣∣F∣∣∣∣f(x(i))−F∣∣≤eR
2. Displacement Convergence:
- Force convergence is achieved when the norm of the vector
Δ
u
\Delta u
Δu divided by the norm of vector
x
(
i
)
x^{(i)}
x(i) is less than the specified tolerance
e
u
e_u
eu
∣ ∣ Δ x ∣ ∣ ∣ ∣ x ( i ) ∣ ∣ ≤ e e \frac{||\Delta x||}{||x^{(i)}||} \leq e_e ∣∣x(i)∣∣∣∣Δx∣∣≤ee
Example 2 - Multi-Variable Newton-Raphson Method:
If f ( x 1 , x 2 ) = [ 20 x 1 4 x 2 + 3 x 2 3 , 20 x 1 2 x 2 3 ] f(x_1, x_2) = [20x_1^4x_2+3x_2^3, 20x_1^2x_2^3] f(x1,x2)=[20x14x2+3x23,20x12x23], find { x 1 , x 2 } \{x_1, x_2\} {x1,x2} such that f ( x 1 , x 2 ) = [ 20 , 1 ] f(x_1, x_2) = [20, 1] f(x1,x2)=[20,1]
Function Information:
f 1 ( x 1 , x 2 ) = 20 x 1 4 x 2 + 3 x 2 3 f 2 ( x 1 , x 2 ) = 20 x 1 2 x 2 3 . ⇒ [ K t ] = [ ∂ f 1 ∂ x 1 ∂ f 1 ∂ x 2 ∂ f 2 ∂ x 1 ∂ f 2 ∂ x 2 ] = [ 80 x 1 3 x 2 20 x 1 4 + 9 x 2 2 40 x 1 x 2 3 60 x 1 2 x 2 2 ] \begin{aligned} f_1(x_1, x_2) &= 20x_1^4x_2+3x_2^3 \\ f_2(x_1, x_2) &= 20x_1^2x_2^3. \\ \Rightarrow [K_t] &= \begin{bmatrix} \frac{\partial f_1}{\partial x_1} &\frac{\partial f_1}{\partial x_2} \\ \frac{\partial f_2}{\partial x_1} &\frac{\partial f_2}{\partial x_2} \end{bmatrix} = \begin{bmatrix} 80x_1^3x_2& 20x_1^4+9x_2^2 \\ 40x_1x_2^3& 60x_1^2x_2^2 \end{bmatrix} \end{aligned} f1(x1,x2)f2(x1,x2)⇒[Kt]=20x14x2+3x23=20x12x23.=[∂x1∂f1∂x1∂f2∂x2∂f1∂x2∂f2]=[80x13x240x1x2320x14+9x2260x12x22]
Sample Calculations (
1
s
t
1^{st}
1st Iteration):
f
1
(
1
,
1
)
=
20
(
1
)
4
(
1
)
+
3
(
1
)
3
=
23
f
2
(
1
,
1
)
=
20
(
1
)
2
(
1
)
3
=
20
[
K
t
]
=
[
80
(
1
)
3
(
1
)
20
(
1
)
4
+
9
(
1
)
2
40
(
1
)
(
1
)
3
60
(
1
)
2
(
1
)
2
]
⇒
[
K
t
]
=
[
80
29
40
60
]
[
Δ
x
]
=
[
K
t
]
−
1
(
[
F
]
−
[
f
]
)
[
Δ
x
]
=
[
80
29
40
60
]
−
1
(
[
20
1
]
)
−
[
23
20
]
)
=
[
0.102
−
0.385
]
)
\begin{aligned} f_1(1, 1) &= 20(1)^4(1) + 3(1)^3 = 23 \\ f_2(1, 1) &= 20(1)^2(1)^3 = 20 \\ [K_t] & = \begin{bmatrix} 80(1)^3(1) & 20(1)^4+9(1)^2 \\ 40(1)(1)^3 & 60(1)^2(1)^2 \end{bmatrix} \\ \Rightarrow [K_t] &= \begin{bmatrix} 80 & 29 \\ 40 & 60 \end{bmatrix} \\ [\Delta x] &= [K_t]^{-1}([F]-[f]) \\ [\Delta x] &=\begin{bmatrix} 80 & 29 \\ 40 & 60 \end{bmatrix} ^{-1}( \begin{bmatrix} 20 \\ 1 \end{bmatrix}) - \begin{bmatrix} 23 \\ 20 \end{bmatrix}) = \begin{bmatrix} 0.102 \\ -0.385 \end{bmatrix}) \end{aligned}
f1(1,1)f2(1,1)[Kt]⇒[Kt][Δx][Δx]=20(1)4(1)+3(1)3=23=20(1)2(1)3=20=[80(1)3(1)40(1)(1)320(1)4+9(1)260(1)2(1)2]=[80402960]=[Kt]−1([F]−[f])=[80402960]−1([201])−[2320])=[0.102−0.385])
| x 1 ( i ) x_1^{(i)} x1(i) | x 2 ( i ) x_2^{(i)} x2(i) | f 1 ( x ( i ) ) f_1(x^{(i)}) f1(x(i)) | f 2 ( x ( i ) ) f_2(x^{(i)}) f2(x(i)) | Δ x 1 \Delta x_1 Δx1 | Δ x 2 \Delta x_2 Δx2 | e R e_R eR | e u e_u eu |
|---|---|---|---|---|---|---|---|
| 1 | 1 | 23 | 20 | 0.102 | -0.385 | 96.1 | 28.1 |
| 1.102 | 0.615 | 18.838 | 5.650 | 0.125 | -0.215 | 23.9 | 19.7 |
| 1.227 | 0.400 | 18.325 | 1.927 | 0.096 | -0.085 | 9.6 | 9.9 |
| ⋮ \vdots ⋮ | ⋮ \vdots ⋮ | ⋮ \vdots ⋮ | ⋮ \vdots ⋮ | ⋮ \vdots ⋮ | ⋮ \vdots ⋮ | ⋮ \vdots ⋮ | ⋮ \vdots ⋮ |
| 1.348 | 0.302 | 19.979 | 1.001 | 0.001 | -0.0001 | 0.1 | 0.04 |
6 Iterations
Other Methods:
Over the years the Newton-Raphson method has been modified to help improve stability and reduce computation time:
1. Modified Newton-Rapshson Method
- [ K t ] [K_t] [Kt] is recalculated at selected iterations (say every 5 t h 5^{th} 5th increment) or kept constant during the entire analysis
- Requires additional computations to converge but is able to reduce computation cost
Secant Method (Quasi-Newton)
- Approximates [ K t ] [K_t] [Kt] after the first iterations
[ K t ] i = f ( x ( i ) ) − f ( x ( i − 1 ) ) x ( i ) − x ( i − 1 ) [K_t]_i = \frac{f(x^{(i)})-f(x^{(i-1)})}{x^{(i)}-x^{(i-1)}} [Kt]i=x(i)−x(i−1)f(x(i))−f(x(i−1))
- Don’t need to calculate derivatives!
- Provides a good convergence rate while reducing the computational cost
Example 3- Single Variable Modified Newton-Raphson Method:
If f ( x ) = x f(x) = \sqrt{x} f(x)=x, find x x x such that f ( x ) = 3 f(x) = 3 f(x)=3
Function Information:
f ( x ) = x ⇒ K t = ∂ f ∂ x = 1 2 x \begin{aligned} f(x) = \sqrt{x} \Rightarrow K_t = \frac{\partial f}{\partial x} = \frac{1}{2\sqrt{x}} \end{aligned} f(x)=x⇒Kt=∂x∂f=2x1
Δ x = K t − 1 ( F − f ( x ( i ) ) ) \Delta x =K_t^{-1}(F-f(x^{(i)})) Δx=Kt−1(F−f(x(i)))
| x ( i ) x^{(i)} x(i) | f ( x ( i ) ) f(x^{(i)}) f(x(i)) | K t K_t Kt | Δ x \Delta x Δx | x ( i + 1 ) x^{(i+1)} x(i+1) |
|---|---|---|---|---|
| 1 | 1 | 0.5 | 4 | 5 |
| x ( i ) x^{(i)} x(i) | f ( x ( i ) ) f(x^{(i)}) f(x(i)) | K t K_t Kt | Δ x \Delta x Δx | x ( i + 1 ) x^{(i+1)} x(i+1) |
|---|---|---|---|---|
| 1 | 1 | 0.5 | 4 | 5 |
| 5 | 2.24 | 0.5 | 1.52 | 6.52 |
| x ( i ) x^{(i)} x(i) | f ( x ( i ) ) f(x^{(i)}) f(x(i)) | K t K_t Kt | Δ x \Delta x Δx | x ( i + 1 ) x^{(i+1)} x(i+1) |
|---|---|---|---|---|
| 1 | 1 | 0.5 | 4 | 5 |
| 5 | 2.24 | 0.5 | 1.52 | 6.52 |
| 6.52 | 2.55 | 0.5 | 0.89 | 7.41 |
| x ( i ) x^{(i)} x(i) | f ( x ( i ) ) f(x^{(i)}) f(x(i)) | K t K_t Kt | Δ x \Delta x Δx | x ( i + 1 ) x^{(i+1)} x(i+1) |
|---|---|---|---|---|
| 1 | 1 | 0.5 | 4 | 5 |
| 5 | 2.24 | 0.5 | 1.52 | 6.52 |
| 6.52 | 2.55 | 0.5 | 0.89 | 7.41 |
| 7.41 | 2.72 | 0.5 | 0.55 | 7.97 |
Slower Convergence!!
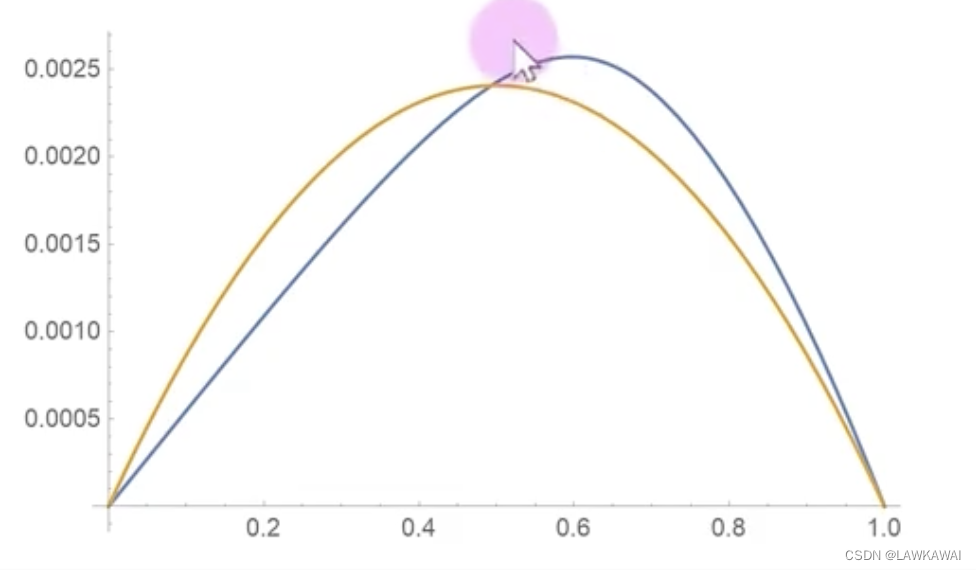
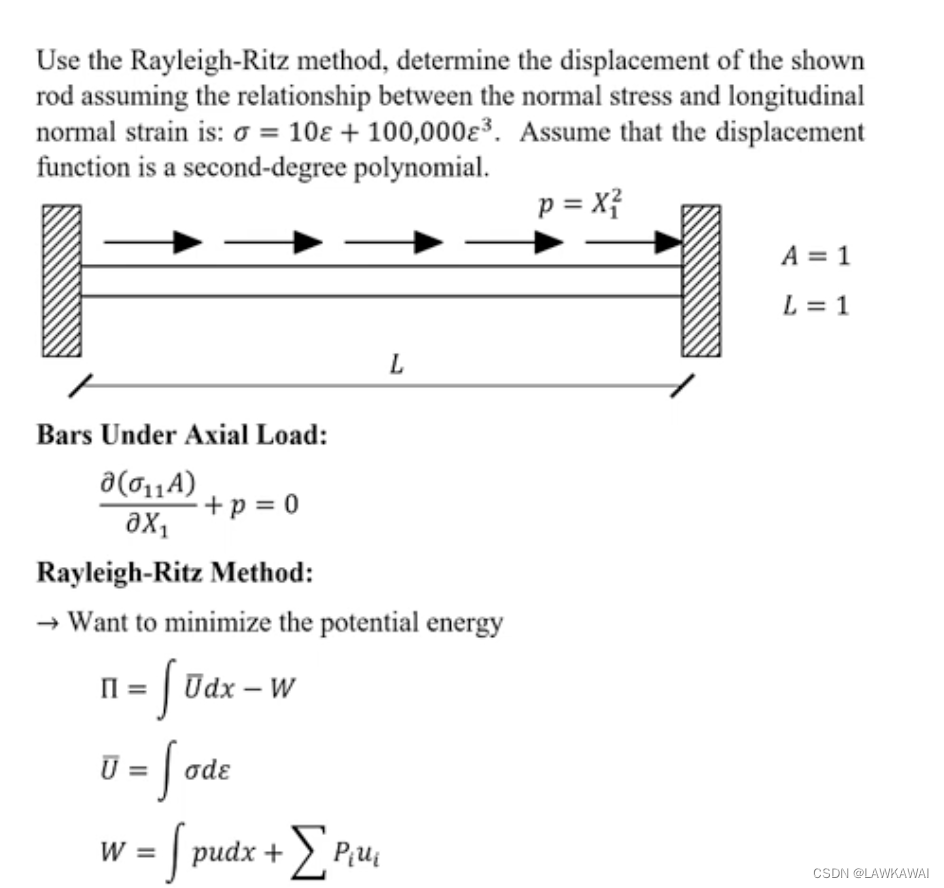
Material Nonlinearity Example
Wolfram Mathematica
(* Material Nonlinearity Example*)
Clear["Global *"]
(*Parameters *)
L = 1.0;
A = 1;
p = X1^2';
(* Newton-Raphson Parameters*)
Xi = 1;
ErrorLimit = 0.5;
MaxIter = 1;
(* Stress-Strain Relationship *)
s = 10 * u'[X1] + 100000 * u'[X1]^3;
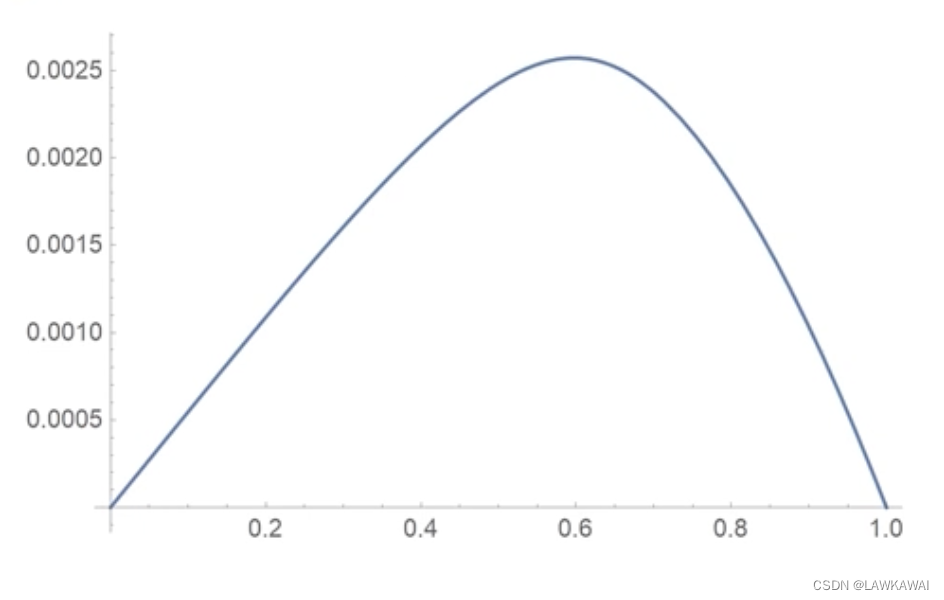
(* Exact Solution *)
DE = D[s*A, X1]+p;
sol = NDSolve[{DE == 0, u[0] == 0, u[L] == 0}, u[X1], X1]; // Numerical
uExact = u[X1] /. sol[[1]];
Plot[uExact, {X1, 0, L}]
(* RR Approximation *)
(* Approximation Function *)
uApprox = a0 + a1*X1 + a2*X1^2;
(* Essential Boundary Conditioons *)
BC1 = uApprox /. {X1 -> 0};
BC2 = uApprox /. {X1 -> L};
sol1 = Solve[{BC1 == 0, BC2 == 0}, {a0, a1}];
{a0, a1} = {a0, a1} /. sol1[[1]];
(* Total Internal Strain Energy *)
S = 10 * e + 100000 * e^3;
SED = Integrate[S, {e, 0, e}]; // 5e^2 + 25000e^4, Strain Energy Density
e = D[uApprox, X1];
TSE = Integrate[SED, {X1, 0, L}]; // 1.66667a2^2+5000 a2^4, Total Strain Energy
(* Work *)
W = Integrate[p * uApprox, {X1, 0, L}]; // -0.05a2
(* Potential Energy *)
PE = TSE - W; // 0.05a2 + 1.66667a2^2 + 5000a2^4
(* Newton-Rapshon Method *)
// What equation trying to solve?
ai = {a2};
Func = D[PE, a2]; // f(x)
Kt = D[Func, a2]; // f'(x)
For[i = 1, i <= maxIter, i++
(* Calculate Function and Kt at Current Iteration *)
FuncIter = Func /. {a2 -> Xi};
KtIter = Kt /. {a2 -> Xi};
(* Solving for Delta X *)
Delta = (-1) * FuncIter / KtIter;
(* Finding Xi for Next Iteration *)
XInit = Xi;
Xi = Xi + Delta;
(* Break Loop Once Convergence Occurs *)
Error. = (Delta / XInit) * 100;
If[Abs[Error] <= ErrorLimit,
Print["Analysis Converged!"];
Print[" Coefficient a2 = ", Xi];
Print[" Error= ", Error, " (%)"];
a2 = Xi;
Conv = 1;
Break[]];
(* Track Results *)
Print[" Iteration: ", i];
Print[" Coefficient a2 = ", Xi];
Print["Error = ", Error, "(%)"];
(* Error Message if Max Number of Iterations Reached *)
If[i==maxIter,
Print["Max of Number of Iterations Reached"]];
]
Plot[{uExact, uApprox}, {X1, 0, L}]