1、引言
我们在通信机制中,前面已有介绍这个Service服务:ROS通信机制之服务(Service)的应用
一般在一些通信处理比较简单的场景比较适合,这里我们在无人车上面来实际操作一些很常见的服务:发布电压数据、点亮与关闭LED灯、开启与关闭蜂鸣器、以及控制左右马达的速度等操作。
服务端:提供服务的节点,定义了一个回调函数,用来处理请求
客户端:服务请求的节点,通过本地代理去调用这个服务
工作区与包的创建过程就忽略了,有兴趣的可以查阅:ROS新建工作区(workspace)与包(package)编译的实践(C++示例)
2、无人车应用
2.1、目录
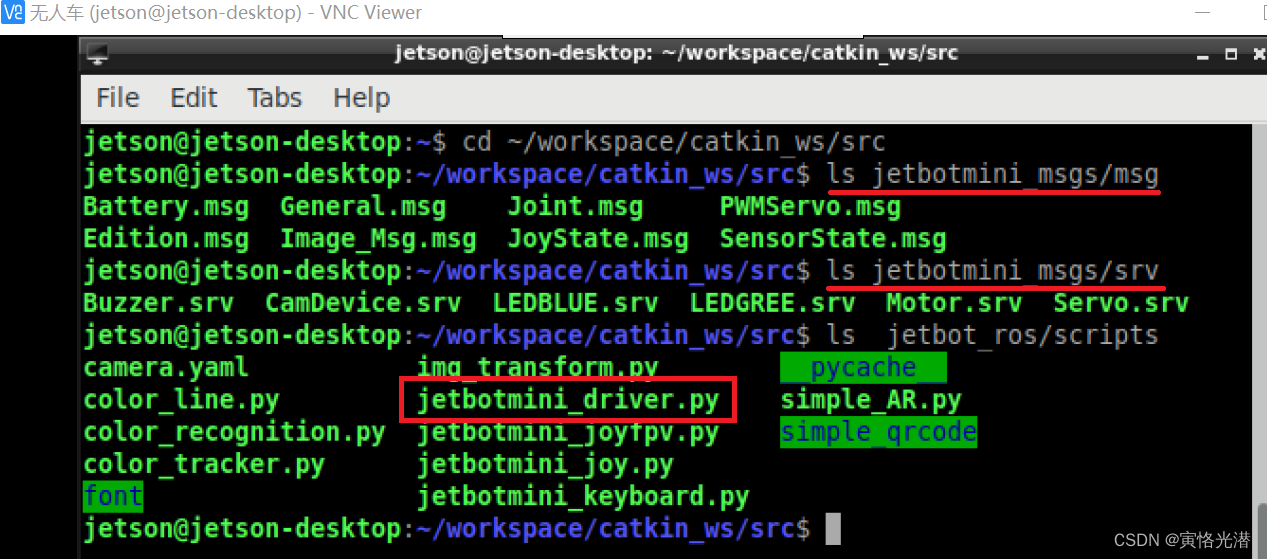
先来了解下有哪些消息、服务、节点文件:
cd ~/workspace/catkin_ws/src
ls jetbotmini_msgs/msg
ls jetbotmini_msgs/srv
ls jetbot_ros/scripts截图如下:
2.2、启动节点
然后我们直接开启ROSMASTER之后,启动无人车的节点,后续将主要代码贴出,更加清晰了解无人车的服务通信机制。
roscorerosrun jetbot_ros jetbotmini_driver.py好的,现在我们就可以对无人车进行通信了
2.3、查看话题
先来看下有哪些话题:rostopic list
/rosout
/rosout_agg
/voltage
这里可以看到,有了一个 voltage 电压的话题。
2.4、查看服务
接着重点来看下提供了哪些服务列表:rosservice list
/Buzzer
/LEDBLUE
/LEDGREE
/Motor
/Servo
/driver_node/get_loggers
/driver_node/set_logger_level
/rosout/get_loggers
/rosout/set_logger_level
服务列表中有蜂鸣器,LED灯、马达、舵机等服务,接下来我们通过命令行来操作这些服务,让其和无人车进行通信。
服务的定义很简单,我们来具体查看下
2.5、蜂鸣器
输入命令:rossrv show Buzzer
输入类型跟输出类型之间使用三根小横短线隔开---
[jetbotmini_msgs/Buzzer]:
int32 buzzer
---
bool result
开启蜂鸣器:rosservice call /Buzzer "buzzer: 1"
result: True #这个是返回值
关闭蜂鸣器:rosservice call /Buzzer "buzzer: 0"
result: True
2.6、舵机
输入命令:rossrv show Servo
[jetbotmini_msgs/Servo]:
int32 servoid
int32 angle
---
bool result
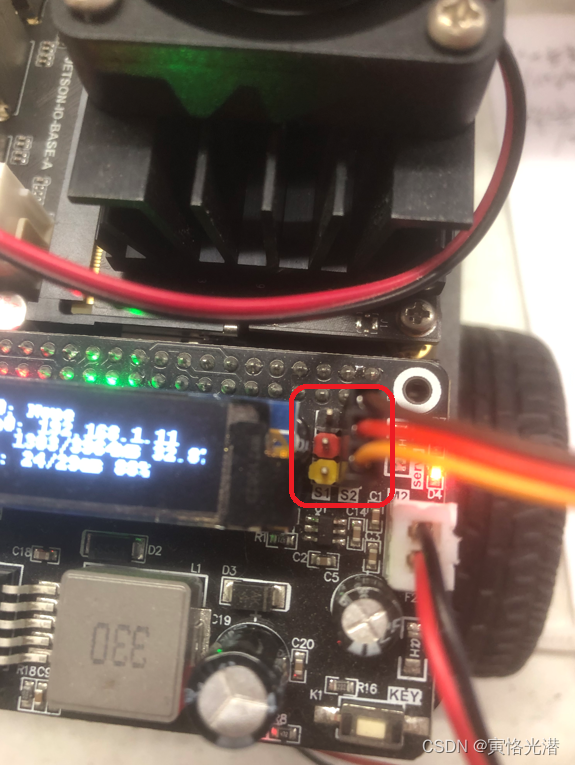
我的无人车有两个舵机接口S1和S2,如下图:
舵机1角度90:rosservice call /Servo 1 90
result: True
舵机2角度90:rosservice call /Servo 2 90
result: True
查看舵机参数:rosservice args Servo
servoid angle
舵机1旋转30度角:rosservice call /Servo 1 30
当然参数是多个的时候,也可以指定参数名称的写法,使用字典形式来执行,这样更直观:
rosservice call /Servo "{'servoid': 1, 'angle': 30}"
2.7、LED灯
点亮LEB蓝灯:rosservice call /LEDBLUE 1
result: True
如下图:

点亮LED绿灯:rosservice call /LEDGREE 1
result: True
如下图:

一起点亮:
2.8、电机(马达)
查看Motor马达的数据类型结构:rossrv show Motor
[jetbotmini_msgs/Motor]:
float32 rightspeed
float32 leftspeed
---
bool result
查看Motor马达的参数:rosservice args Motor
rightspeed leftspeed
【rightspeed】 :[-1, 1],右边电机速度,小于0反转,大于0正转。
【leftspeed】:[-1, 1],左边电机速度,小于0反转,大于0正转。
左电机(马达轮子)50%速度,右马达80%速度:rosservice call /Motor 0.5 0.8
查看有哪些话题:rostopic list
/rosout
/rosout_agg
/voltage
可视化查看话题消息:rosrun rqt_topic rqt_topic
如下图,点击voltage话题的复选框进行勾选:
 这样就可以直观的看到电压是10.67V,频率是0.03赫兹(每30秒更新一次)
这样就可以直观的看到电压是10.67V,频率是0.03赫兹(每30秒更新一次)
3、jetbotmini_driver.py
重点来看下这个节点的代码,里面就是上述定义的各种服务,所以我们将消息和服务给导入进来:
from jetbotmini_msgs.msg import *
from jetbotmini_msgs.srv import *jetbotmini_msgs.msg和jetbotmini_msgs.srv是自动生成的,关于消息的定义在前面也有介绍,有兴趣的可以查阅:ROS通信机制之话题(Topics)的发布与订阅以及自定义消息的实现
会根据你的Python版本生成到对应位置,比如我这里是在下面这个目录
~/workspace/catkin_ws/devel/lib/python2.7/dist-packages/jetbotmini_msgs
分别生成在这里面的msg和srv文件夹里面。
截图如下:

接着回到jetbotmini_driver.py这个文件,源码如下:
#!/usr/bin/env python3
# encoding: utf-8
import rospy
import random
import threading
from time import sleep
from jetbotmini_msgs.msg import *
from jetbotmini_msgs.srv import *
import RPi.GPIO as GPIO # Raspberry Pi 的GPIO库
import smbus
bus = smbus.SMBus(1) # 使用编号为1的总线,用于I2C通信
ADDRESS = 0x1B
Led_G_pin = 24 # 引脚编号
Led_B_pin = 23
Key1_pin = 8
GPIO.setmode(GPIO.BCM) # BCM模式是指使用Broadcom SOC通道编号的方式
GPIO.setup(Led_G_pin, GPIO.OUT, initial=GPIO.HIGH) # 引脚设置为输出模式,初始化为高电平
GPIO.setup(Led_B_pin, GPIO.OUT, initial=GPIO.HIGH)
GPIO.setup(Key1_pin, GPIO.IN) #输入模式,可以读取引脚的状态
print("Starting now!")
class transbot_driver:
def __init__(self):
rospy.on_shutdown(self.cancel)
self.srv_Buzzer = rospy.Service("/Buzzer", Buzzer, self.Buzzercallback)
self.srv_Servo = rospy.Service("/Servo", Servo, self.Servocallback)
self.srv_LEDBLUE = rospy.Service("/LEDBLUE", LEDBLUE, self.LEDBLUEcallback)
self.srv_LEDGREE = rospy.Service("/LEDGREE", LEDGREE, self.LEDGREEcallback)
self.srv_Motor = rospy.Service("/Motor", Motor, self.Motorcallback)
self.volPublisher = rospy.Publisher("/voltage", Battery, queue_size=10)
def cancel(self):
self.srv_Buzzer.shutdown()
self.srv_Servo.shutdown()
self.srv_LEDBLUE.shutdown()
self.srv_LEDGREE.shutdown()
self.srv_Motor.shutdown()
self.volPublisher.unregister()
GPIO.cleanup()
rospy.loginfo("Close the robot...")
rospy.sleep(1)
def pub_data(self):
# 发布电池电压
while not rospy.is_shutdown():
sleep(30)
AD_value = bus.read_i2c_block_data(ADDRESS,0x00,2)
voltage = ((AD_value[0] << 8) + AD_value[1]) * 13.3 / 1023.0
battery = Battery()
battery.Voltage = voltage
self.volPublisher.publish(battery)
def Buzzercallback(self, request):
#蜂鸣器控制,服务器回调函数
if not isinstance(request, BuzzerRequest): return
bus.write_byte_data(ADDRESS,0x06,request.buzzer)
sleep(0.01)
bus.write_byte_data(ADDRESS,0x06,request.buzzer)
response = BuzzerResponse()
response.result = True
return response
def Servocallback(self, request):
# 控制舵机
if not isinstance(request, ServoRequest): return
bus.write_i2c_block_data(ADDRESS,3,[request.servoid,request.angle])
sleep(0.01)
bus.write_i2c_block_data(ADDRESS,3,[request.servoid,request.angle])
response = ServoResponse()
response.result = True
return response
def LEDBLUEcallback(self, request):
# 控制蓝色LED
if not isinstance(request, LEDBLUERequest): return
if request.ledblue == 1:
GPIO.output(Led_B_pin, GPIO.LOW)
elif request.ledblue == 0:
GPIO.output(Led_B_pin, GPIO.HIGH)
response = LEDBLUEResponse()
response.result = True
return response
def LEDGREEcallback(self, request):
# 控制绿色LED
if not isinstance(request, LEDGREERequest): return
if request.ledgree == 1:
GPIO.output(Led_G_pin, GPIO.LOW)
elif request.ledgree == 0:
GPIO.output(Led_G_pin, GPIO.HIGH)
response = LEDGREEResponse()
response.result = True
return response
def Motorcallback(self, request):
# 控制马达,速度小于0就反方向
if not isinstance(request, MotorRequest): return
if request.leftspeed < 0:
request.leftspeed = -request.leftspeed
leftdir = 0
else:
leftdir = 1
if request.rightspeed < 0:
request.rightspeed = -request.rightspeed
rightdir = 0
else:
rightdir = 1
bus.write_i2c_block_data(ADDRESS,0x01,[leftdir,int(request.leftspeed*255),rightdir,int(request.rightspeed*255)])
sleep(0.01)
bus.write_i2c_block_data(ADDRESS,0x01,[leftdir,int(request.leftspeed*255),rightdir,int(request.rightspeed*255)])
response = MotorResponse()
response.result = True
return response
if __name__ == '__main__':
rospy.init_node("driver_node", anonymous=False)
try:
driver = transbot_driver()
driver.pub_data()
rospy.spin()
except:
rospy.loginfo("Final!!!")首先初始化一些相关操作,将GPIO设置成BCM模式,然后根据引脚编号来初始化成高电平,模式是输出模式,这样就可以根据高低电平来控制LED灯,如果想要控制亮度,就需要使用到PWM脉宽调制方法。需要注意的是,cancel函数里面的GPIO.cleanup(),让引脚恢复到原来的状态,释放所有引脚不再有输出,避免一些电气的损坏与火灾的发生。
其余的都是一些回调函数,主要是一些写入和判断操作,通过这些回调函数就可以操作对应的元器件了。
这节主要是对Service服务做一个实操,巩固其作为通信机制之一的用法,在实际当中的具体运用。
其中代码里面有一些关于GPIO通用输入输出的知识点,有兴趣的可以查阅:
JetsonNano板子的RPi.GPIO接口实物图和功能介绍