PR曲线
检测不到的主要原因是光线、阴影等造成的无法提取图像信息
1. Robust_Place_Recognition_using_an_Imaging_Lidar
If the position between the matched nodes is less than 2m, we consider this detection a true positive, otherwise a false positive.
如果匹配节点之间的位置小于2m,则认为该检测为真阳性,否则为假阳性。
第四节的实验部分,没有绘制pr曲线,而是针对某一次实验计算了总共的loop次数、真阳性和假阳性,
2.Scan context: Egocentric spatial descriptor for place recognition within 3d point cloud map
If a ground truth pose distance between the query and the matched node is less than 4 m, the detection is considered as true positive.
如果查询和匹配节点之间的地面真实姿态距离小于 4 m,则检测被视为真阳性。
阈值为4m,大于这个数字就被视为假阳性;否则算法通过视为真阳性
3.M2DP: A novel 3D point cloud descriptor and its application in loop closure detection
Two locations are considered as the ground truth loop closure if their distance is less than 10m.
如果距离小于 10m,则两个位置被视为真实环路闭合。
For each point cloud, we calculate its descriptor and search for the nearest neighbour as the matching candidate. The ±50 (±5 for Freiburg Campus) frames before/after the current frame are excluded from the matching process to avoid matching neighboring point clouds. We then vary a distance threshold on the nearest neighbour distance to determine the match. If the distance between one frame and its nearest neighbour is less than the threshold, we take this match as loop closure. Using this threshold, the recall and precision curve is generated to compare the performance of different methods.
对于每个点云,我们计算其描述符并搜索最近的邻居作为匹配候选者。当前帧之前/之后的±50(弗莱堡校区±5)帧被排除在匹配过程之外,以避免匹配相邻点云。然后,我们改变最近邻距离的距离阈值来确定匹配。如果一帧与其最近邻居之间的距离小于阈值,则我们将此匹配视为闭环。使用此阈值,生成召回率和精度曲线以比较不同方法的性能。
第一段是在找寻现实真值回环,将两个位置的距离差值小于10m的视为真实回环闭合
第二段是在找寻算法上回环,通过阈值来调整
4.Lidar iris for loop-closure detection
In order to get the ground truth of pose and location for our data, we use high-fidelity IMU/GPS to record the poses and locations of each LiDAR’s frame.We only use the keyframes and their ground-truth locations in our experiment. Note that the distance between two keyframe locations is set to 1m.
为了获得数据的姿态和位置的真实情况,我们使用高保真 IMU/GPS 来记录每个 LiDAR 帧的姿态和位置。我们在实验中仅使用关键帧及其真实位置。请注意,两个关键帧位置之间的距离设置为 1m。
The first protocol, protocol A, is a real one for loopclosure detection. Suppose that the keyframe for current location is fkc, to find whether the current location has been traversed or not, we need to match fkc with all previous keyframes in the map database except the very close ones, e.g., the 30 keyframes ahead of the current one. By setting a threhold on the feature distance, denoted by df, between fkc and the closest match in the database, we can predict whether fkc corresponds to an already traversed place or not. If the feature distance is no larger than df, fkc is predicted as a loop closure. Otherwise, fkc is predicted as not a loop closure.
第一个协议,协议 A,是真正的闭环检测协议。假设当前位置的关键帧是fkc,要判断当前位置是否被遍历过,我们需要将fkc与地图数据库中除非常接近的关键帧之外的所有先前关键帧进行匹配,例如当前位置之前的30个关键帧。通过对fkc与数据库中最接近的匹配之间的特征距离(用df表示)设置阈值,我们可以预测fkc是否对应于已经遍历过的位置。如果特征距离不大于df,则fkc被预测为闭环。否则,fkc 被预测为不是循环闭合。
if fkc is predicted as a loop-closure event, it is regarded as a true positive only if the ground truth distance between fkc and the closest match in the database is less than 4m.
如果fkc被预测为闭环事件,则仅当fkc与数据库中最接近的匹配之间的groundtruth距离小于4m时才被视为真阳性。
5.BoCNF: efficient image matching with Bag of ConvNet features for scalable and robust visual place recognition
(a) The UACampus (Liu et al. 2015) dataset…Images in the two subsets are manually matched to generate the ground truth.
手动匹配两个子集中的图像以生成地面实况。
(b) The St. Lucia (Glover et al. 2010) dataset…In our experiments, we use 10,000 images uniformly sampled from the dataset. The ground truth was created with GPS. Two images within 20m are considered to be from the same place.
在我们的实验中,我们使用从数据集中均匀采样的 10,000 张图像。地面实况是通过 GPS 创建的。 20m以内的两张图像被认为来自同一地点。
© The CMU (Badino et al. 2011) dataset…The ground truth was created with GPS. Two images within 10m are considered to be from the same place.
地面实况是通过 GPS 创建的。 10m以内的两张图像被认为来自同一地点。
6.Visual Place Recognition: A Survey
Visual place recognition systemsmust be able to successfully match very perceptually different images while also rejecting incorrect matches between aliased image pairs of different places.
视觉地点识别系统必须能够成功匹配感知上非常不同的图像,同时还能拒绝不同地点的混叠图像对之间的错误匹配。
7.SeqSLAM: Visual route-based navigation for sunny summer days and stormy winter nights
Two of the datasets were sourced from online videos, and GPS was not reliable enough to be gathered during acquisition of the Alderley dataset. Consequently, to obtain ground truth, all videos were manually parsed frame by frame and key frames had their latitude and longitude tagged using a combination of Google Maps, Google Street View, and NearMaps.
其中两个数据集来自在线视频,GPS 不够可靠,无法在获取 Alderley 数据集期间收集。因此,为了获得真实情况,所有视频都经过手动逐帧解析,并且结合使用 Google 地图、Google 街景和近图来标记关键帧的纬度和经度。
8.Panoramic annular SLAM with loop closure and global optimization
However, LDSO and VINS-Mono only conduct pose graph optimization, but do not perform the global bundle adjustment (BA).
然而,LDSO和VINS-Mono仅进行位姿图优化,但不进行全局束调整(BA)。

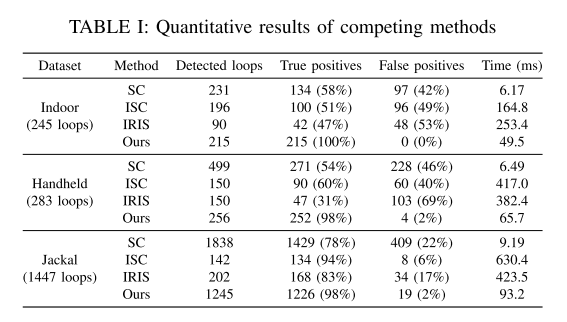
For each detected loop closure candidate, if the difference of index between the candidate frame and the current query frame is less than the interval number of keyframes (30 in this paper), it is considered to be a true positive (TP) loop closure; Otherwise, it will be treated as false positive (FP). In addition, all the query frames that fail in detecting loop closure are defined as false negative (FN).
对于每个检测到的回环候选,如果候选帧与当前查询帧之间的索引差值小于关键帧的区间数(本文中为30),则认为是真阳性(TP)回环;否则,将被视为误报(FP)。
Image sequences that are used in this test are captured in an office, with paths ranging from 3 meters to 50 meters in length.
此测试中使用的图像序列是在办公室中捕获的,路径长度范围为 3 米到 50 米。