现有网络模型的使用与修改
vgg16_false = torchvision.models.vgg16(pretrained=False) # 加载一个未预训练的模型
vgg16_true = torchvision.models.vgg16(pretrained=True)
# 把数据分为了1000个类别
print(vgg16_true)以下是vgg16预训练模型的输出
VGG(
(features): Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(5): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(6): ReLU(inplace=True)
(7): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(8): ReLU(inplace=True)
(9): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(10): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU(inplace=True)
(12): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(13): ReLU(inplace=True)
(14): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(15): ReLU(inplace=True)
(16): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(17): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(18): ReLU(inplace=True)
(19): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(20): ReLU(inplace=True)
(21): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(22): ReLU(inplace=True)
(23): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(24): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(25): ReLU(inplace=True)
(26): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(27): ReLU(inplace=True)
(28): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(29): ReLU(inplace=True)
(30): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(avgpool): AdaptiveAvgPool2d(output_size=(7, 7))
(classifier): Sequential(
(0): Linear(in_features=25088, out_features=4096, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): ReLU(inplace=True)
(5): Dropout(p=0.5, inplace=False)
(6): Linear(in_features=4096, out_features=1000, bias=True)
)
)预训练模型的输出从1000类别转为10类别
import torchvision
from torch import nn
# 因为数据集过大,所以注释掉此行代码
# train_data = torchvision.datasets.ImageNet("./data_image_net", split='train', download=True,
# transform=torchvision.transforms.ToTensor())
vgg16_false = torchvision.models.vgg16(pretrained=False) # 加载一个未预训练的模型
vgg16_true = torchvision.models.vgg16(pretrained=True)
# 把数据分为了1000个类别
print(vgg16_true)
# vgg16_true.add_module("add_linear", nn.Linear(1000, 10))
vgg16_true.classifier.add_module("add_linear", nn.Linear(1000, 10))
# 在预训练模型的最后添加了一个新的全连接层,用于将最后的输出转化为10个类别
print(vgg16_true)
print(vgg16_false)
vgg16_false.classifier[6] = nn.Linear(4096, 10)
# 未预训练模型的最后一层的输出特征数更改为了10
print(vgg16_false)
网络模型的保存与读取
加载未预训练的模型
vgg16 = torchvision.models.vgg16(pretrained=False)方式一
# 保存方式1 保存的模型结构+模型参数
torch.save(vgg16, "vgg16_method1.pyth")
#读取方式1
model = torch.load("vgg16_method1.pth")方式二
# 保存方式2 不再保存模型结构,而是保存模型的参数为字典结构 推荐
torch.save(vgg16.state_dict(), "vgg16_method2.pyth")
# 方式2,加载模型
# model = torch.load("vgg16_method2.pth") #这样输出的是字典类型
# print(model)
vgg16 = torchvision.models.vgg16(pretrained=False)
vgg16.load_state_dict(torch.load("vgg16_method2.pth")) # 将其恢复为网络模型
print(vgg16)完整的模型训练套路
准备数据集
# 准备数据集
train_data = torchvision.datasets.CIFAR10("../data", train=True, transform=torchvision.transforms.ToTensor(),
download=True)
test_data = torchvision.datasets.CIFAR10("../data", train=False, transform=torchvision.transforms.ToTensor(),
download=True)
train_data_size = len(train_data)
test_data_size = len(test_data)
print("训练数据集的长度为{}".format(train_data_size)) # 50000
print("测试数据集的长度为{}".format(test_data_size)) # 10000
# 利用Dataloader来加载数据集
train_dataloader = DataLoader(train_data, batch_size=64)
test_dataloader = DataLoader(test_data, batch_size=64)创建网络模型
# 创建网络模型 神经网络的代码在train_module文件
tudui = Tudui()train_module文件
# 搭建神经网络
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
# 简化操作,并且按顺序进行操作
self.model1 = Sequential(
Conv2d(3, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 64, 5, padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024, 64),
Linear(64, 10)
)
def forward(self, x):
x = self.model1(x)
return x构建损失函数
# 损失函数
loss_fn = nn.CrossEntropyLoss()构建优化器
# 优化器
# 如果学习率过大,模型可能会在最小值附近震荡而无法收敛;如果学习率过小,模型训练可能会过于缓慢
learning_rate = 0.01
# 使用随机梯度下降算法来更新模型的权重
optimizer = torch.optim.SGD(tudui.parameters(), lr=learning_rate)设置训练集参数
# 记录训练的次数
total_train_step = 0
# 记录测试的次数
total_test_step = 0
# 训练的轮数
epoch = 10添加tensorboard
# 将数据写入 TensorBoard 可视化的日志文件中
writer = SummaryWriter("../logs_train")训练步骤
# tudui.train()
for data in train_dataloader:
imgs, targets = data
outputs = tudui(imgs)
loss = loss_fn(outputs, targets)
# 优化器优化模型
optimizer.zero_grad()
# 将优化器中的梯度缓存(如果有的话)清零
loss.backward()
# 计算损失函数(loss)相对于模型参数的梯度
optimizer.step()
total_train_step = total_train_step + 1
if total_train_step % 100 == 0:
# .item()是将tensor张量变为正常的数字
print("训练次数:{},Loss:{}".format(total_train_step, loss.item()))
# loss.item()是当前步骤的损失值
writer.add_scalar("train_loss", loss.item(), total_train_step)
# 使用add_scalar可以将一个标量添加到之前的所有标量值中,
# 这样就可以在TensorBoard中绘制一个标量随时间变化的图表测试步骤
# 测试步骤开始
# tudui.eval()
total_test_loss = 0
total_accuracy = 0
# 不会对以下的代码进行调优
with torch.no_grad():
for data in test_dataloader:
imgs, targets = data
outputs = tudui(imgs)
loss = loss_fn(outputs, targets)
total_test_loss = total_test_loss + loss.item()
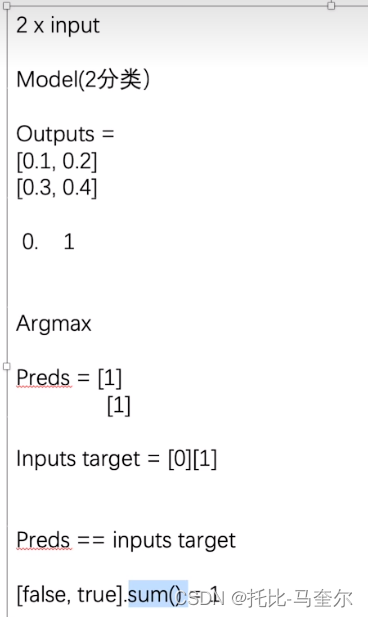
# argmax(1)是横向看,argmax(0)是纵向看
accuracy = (outputs.argmax(1) == targets).sum()
# argmax在找到模型预测的最大概率对应的类别
# 预测正确的个数
total_accuracy = total_accuracy + accuracy
print("整体测试集上的Loss:{}".format(total_test_loss))
print("整体测试集上的正确率:{}".format(total_accuracy/test_data_size))
# 测试集上的总损失
writer.add_scalar("test_loss", total_test_loss, total_test_step)
writer.add_scalar("test_accuracy", total_accuracy/test_data_size, total_test_step)
total_test_step = total_test_step + 1









![日常踩坑-[sass]Error: Expected newline](https://img-blog.csdnimg.cn/img_convert/7d8c6408a39517d5a17e9d7fdc27cffc.png)