文章目录
- 一、名称解读
- 二、ViT回顾
- 三、Swin Transformer vs ViT
- 四、Swin Transformer结构
- 4.1 Patch Merging模块
- 4.2 相对位置编码
- 4.3 shifted window
- 五 总结
爆火的Swin Transformer究竟是个啥?今天本篇文章系统讲解下Swin t 结构、优点、位置编码、移位窗口shifted window,并附上部分代码的解释
论文名称:《Swin Transformer:Hierarchical Vision Transformer using Shifted Windows》,简称Swin Transformer、Swin T
论文下载:https://arxiv.org/pdf/2103.14030.pdf
代码地址:https://github.com/microsoft/Swin-Transformer
一、名称解读
其实论文名字就很好的点出了Swin Transformer的特点,Swin是指Shifted window,使用移位窗口的多层级视觉Transformer,重点在于Hierarchical多层和Shifted Windows移位窗口
二、ViT回顾
ViT是2020年Google团队提出的将Transformer应用在图像分类的模型,虽然不是第一篇将transformer应用在视觉任务的论文,但是因为其模型“简单”且效果好,可扩展性强(scalable,模型越大效果越好),成为了transformer在CV领域应用的里程碑著作。

ViT将二维图片切分为patch,然后序列输入,经过一个线性层(全连接),再加上position,对应图片是左边的输入Patch+Position embedding,在输入的下面还有一行小字Extralearnable [class] embedding,它是特殊字符CLS,借鉴Bert,根据它的输出做分类的判断(transformer的输入和输出维度相同,但是只要一个分类结果,所以增加了一个cls token)。然后经过一个标准的Transformer Encoder和MLP头,输出结果。
三、Swin Transformer vs ViT
Transformer应用到图像领域主要有两大挑战:
- 视觉实体变化大,在不同场景下视觉Transformer性能未必很好
- 图像分辨率高,像素点多,Transformer基于全局自注意力的计算导致计算量较大
遇到高分辨率的图像,采用ViT处理会产生极大的计算复杂。而Swin Transformer的复杂度会比ViT低,主要通过下面两点降低计算复杂度:
(1)分层特征图
(2)局部窗口计算注意力
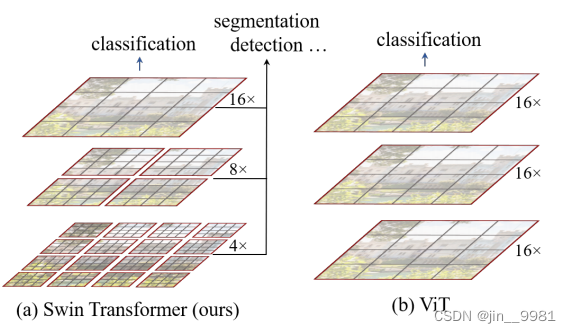
(a) 图表示Swin Transformer 通过合并更深层的图像块(以灰色显示)来构建分层特征图,并且由于仅在每个局部窗口内计算自注意力,因此对输入图像大小具有线性计算复杂度(红色)。
(b) 图是ViT生成单个低分辨率的特征图,并且由于全局自注意力的计算,输入图像大小具有二次方计算复杂度。
四、Swin Transformer结构
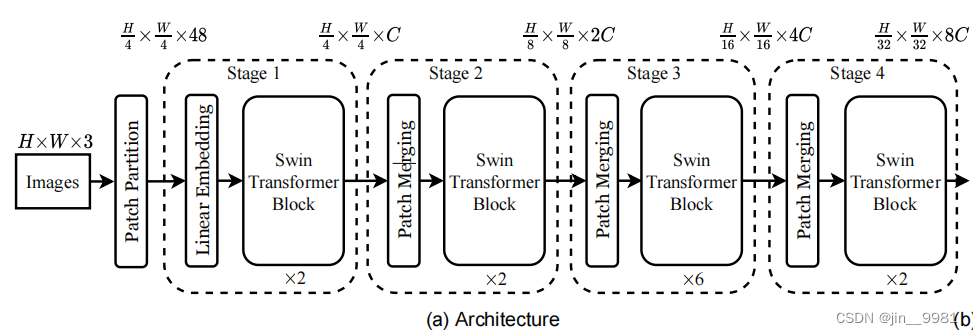
Swin Transformer的结构还是比较简洁的,它的输入和ViT类似,也是将图片切patch序列输入。用4x4的大小切分成patch,则每个patch是4x4x3=48,输出是 H 4 × W 4 × 48 \frac{H}{4} \times \frac{W}{4} \times 48 4H×4W×48。在输入阶段,位置编码用了绝对位置编码,可以加也可以不加,作者代码中可通过self.ape参数进行选择。输入的二维图片切分patch,是通过卷积实现,将224x224x3的图片转换为56x56x96,输入部分的代码如下:
def forward(self, x):
B, C, H, W = x.shape
# FIXME look at relaxing size constraints
assert H == self.img_size[0] and W == self.img_size[1], \
f"Input image size ({H}*{W}) doesn't match model ({self.img_size[0]}*{self.img_size[1]})."
# 1、self.proj卷积:kernel=4,stride=4,224x224x3->56x56x96,公式(w+2p-k)/s + 1
# 2、flatten:将二维转为一维,[N, 96, 3136]
# 3、transpose:维度转换,[N, 3136, 96]
x = self.proj(x).flatten(2).transpose(1, 2) # B Ph*Pw C
if self.norm is not None:
x = self.norm(x)
return x
stage1:线性Embedding -> 2x Swin Transformer Block,输出
H
4
×
W
4
×
C
\frac{H}{4} \times \frac{W}{4} \times C
4H×4W×C
stage2:Patch Merging -> 2x Swin Transformer Block,输出
H
8
×
W
8
×
2
C
\frac{H}{8} \times \frac{W}{8} \times 2C
8H×8W×2C
stage3:Patch Merging -> 6x Swin Transformer Block,输出
H
16
×
W
16
×
4
C
\frac{H}{16} \times \frac{W}{16} \times 4C
16H×16W×4C
stage4:Patch Merging -> 2x Swin Transformer Block,输出
H
32
×
W
32
×
8
C
\frac{H}{32} \times \frac{W}{32} \times 8C
32H×32W×8C
4.1 Patch Merging模块
Patch Merging的作用是降维、升通道,例如stage2,先经过Patch Merging,再经过两个Transformer Block结构,已知Transformer输入和输入维度大小不变,即输入Transformer结构的维度是 H 8 × W 8 × 2 C \frac{H}{8} \times \frac{W}{8} \times 2C 8H×8W×2C,但是输入Patch Merging的维度是 H 4 × W 4 × C \frac{H}{4} \times \frac{W}{4} \times C 4H×4W×C,说明Patch Merging把输入缩小了一半,维度增加了一倍。
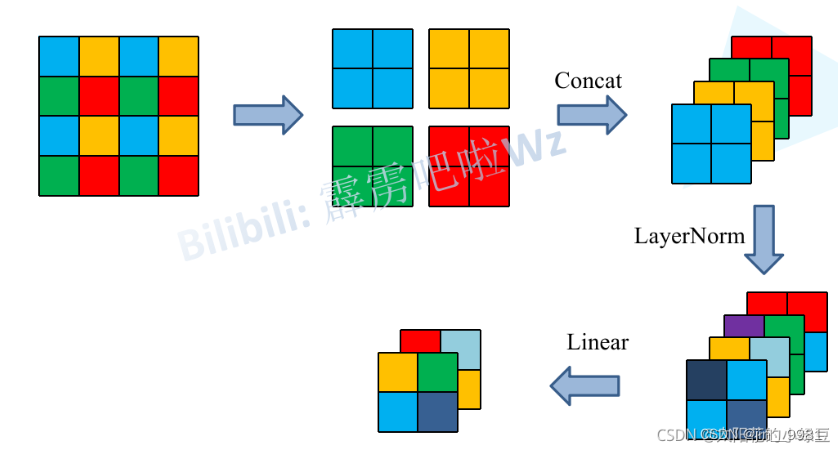
实现流程:
(1)在行方向和列方向上,间隔2选取元素
(2)拼接成张量,通道变成4 * dim
(3)self.reduction:全连接,通道变成2*dim
def forward(self, x):
"""
x: B, H*W, C
"""
H, W = self.input_resolution
B, L, C = x.shape
assert L == H * W, "input feature has wrong size"
assert H % 2 == 0 and W % 2 == 0, f"x size ({H}*{W}) are not even."
x = x.view(B, H, W, C)
x0 = x[:, 0::2, 0::2, :] # B H/2 W/2 C
x1 = x[:, 1::2, 0::2, :] # B H/2 W/2 C
x2 = x[:, 0::2, 1::2, :] # B H/2 W/2 C
x3 = x[:, 1::2, 1::2, :] # B H/2 W/2 C
x = torch.cat([x0, x1, x2, x3], -1) # B H/2 W/2 4*C
x = x.view(B, -1, 4 * C) # B H/2*W/2 4*C
x = self.norm(x)
x = self.reduction(x)
return x
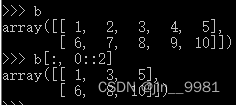
看代码似乎还是不太明白,这里(1)在行方向和列方向上,间隔2选取元素,用了::,没用过这个方法的,可以看下这个例子,间隔n位取数
4.2 相对位置编码
Swin Transformer的相对位置编码并不是用在输入部分,而是在Attention计算过程中,QK计算得到attn张量,再加上位置编码。
若特征图按7x7的窗口划分,每个窗口有49个token,他们之间是有一定的位置关系。下面为了方便展示,用2x2大小的图表示。例如2x2的特征图,经过attention的QK计算,变成4x4,那么相对位置编码的大小也是4x4,图六就是相对位置编码。

图六这个编码是怎么得到的?我们一步步详细解释。
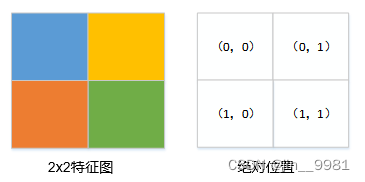
(1)绝对位置编码:对于2x2的特征图,它的绝对位置编码是二维的,行和列用0和1表示,如图七。
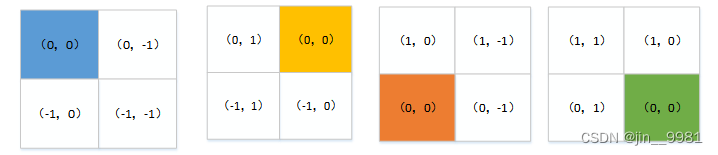
(2)以不同颜色为起点,其他像素的相对位置如图八
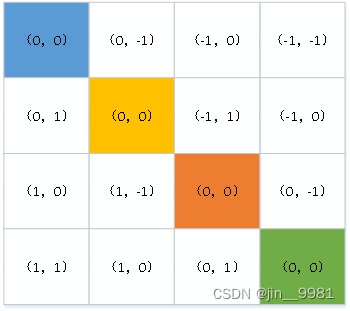
(3)将(2)中的图拉直拼接,得到一个4x4大小的图,如图9
(4)可以发现图9中的数值,既有0、1,也有负数-1,为了使值都大于等于0,行列都加上(M-1),如图十

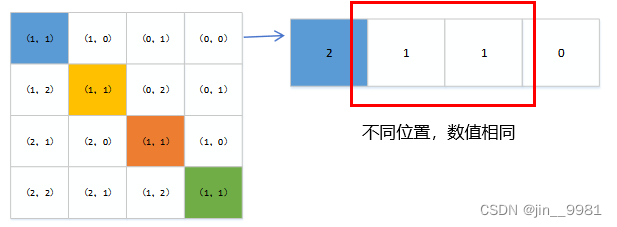
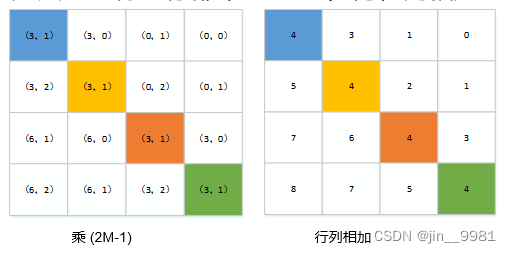
(5)图十中的位置都是二维,为了得到一维的结果,可以想到的一个方法是将行和列加起来(不同位置数值相同,方法不可取,如图11),另外一个方法是行坐标都乘上2M-1,再和列相加,如图12,得到的结果就跟图六相同。
代码实现,可以把代码拷贝到脚本里跑下,跟上面的图做对比:
window_size = [2, 2]
# coords_h、coords_w分别用来代表行列的值,绝对位置
coords_h = torch.arange(window_size[0])
coords_w = torch.arange(window_size[1]) # tensor([0, 1])
coords = torch.stack(torch.meshgrid([coords_h, coords_w])) #torch.Size([2, 2, 2])
coords_flatten = torch.flatten(coords, 1) # torch.Size([2, 4])
"""
tensor([[0, 0, 1, 1],
[0, 1, 0, 1]])
"""
relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :]
# torch.Size([2, 4, 4]),得到行列的相对位置
"""
tensor([[[ 0, 0, -1, -1],
[ 0, 0, -1, -1],
[ 1, 1, 0, 0],
[ 1, 1, 0, 0]],
[[ 0, -1, 0, -1],
[ 1, 0, 1, 0],
[ 0, -1, 0, -1],
[ 1, 0, 1, 0]]])
"""
relative_coords = relative_coords.permute(1, 2, 0).contiguous()
# torch.Size([4, 4, 2])
relative_coords[:, :, 0] += window_size[0] - 1 # shift to start from 0
relative_coords[:, :, 1] += window_size[1] - 1
relative_coords[:, :, 0] *= 2 * window_size[1] - 1 # 横坐标乘上(2M-1)
relative_position_index = relative_coords.sum(-1) # 行、列相加
"""
tensor([[4, 3, 1, 0],
[5, 4, 2, 1],
[7, 6, 4, 3],
[8, 7, 5, 4]])
"""
4.3 shifted window
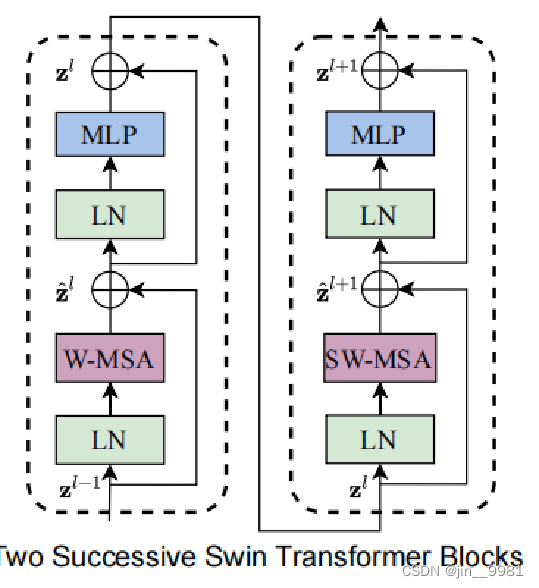
Transformer block用了两种attention,W-MSA(window-multi-head self attention modules,常规attention)和SW-MSA(shifted window-multi-head self attention modules), 图13
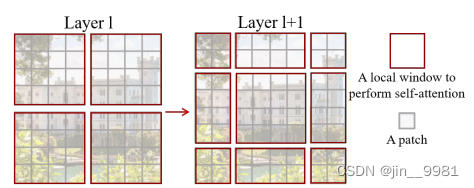
假设在原图中,被分为4个窗口,向左向下移位两格,变成9个窗口,图14。
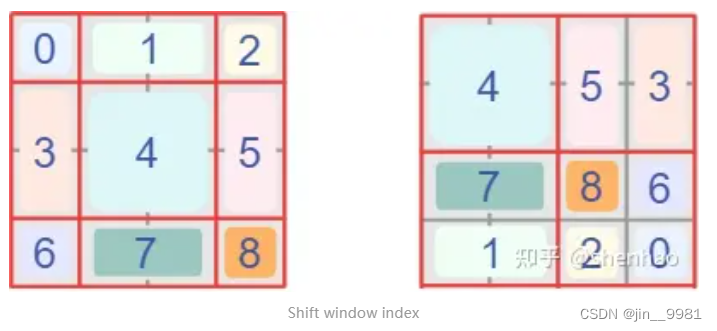
前面提到,attetion只在各个小窗口中计算,那么原本需要4个q、k、v计算的attention,变成了9个q、k、v。在实际代码中,作者通过对特征图移位,并给 Attention 设置 mask 来间接实现的。能在保持原有的 window 个数下,最后的计算结果等价。这是什么意思?我们给九个移位后的窗口用0-8进行编码,如下面图15的左图,再将窗口进行移位,重新拼接成只有四个窗口的图,如右图。
.
你可能会说,attetion只在小窗口中计算,那例如把窗口5和3拼接成一个窗口,就不能实现窗口attetion了。这里,作者通过设置合理的 mask,让Shifted Window Attention在与Window Attention相同的窗口个数下,达到等价的计算结果,图16,窗口4,拉伸成一维,进行QK计算得到attention向量,而对比5/3窗口,通过QK计算后,其实得到的应该是[5, 53, 5, 53]、[35, 3, 35, 3]、[5, 53, 5, 53]、[35, 3, 35, 3],但是5窗口attention只计算自己,就mask掉,对应图片灰色格子无数字部分。

五 总结
Swin Transformer的两个重点就是位置编码和mask attention,在四中做了详细的介绍。作者提供的代码中,Swin t 可以实现很多任务,分类、目标检测、分割、半监督、特征蒸馏等。
如果文章对您有所帮助,记得点赞、收藏、评论探讨✌️