文章目录
- 第2章 数学模型
- 基本概念
- 2.1 控制系统的运动微分方程
- a. 常微分方程的一般标准形式
- b. 线性定常系统微分方程的一般标准形式
- 2.1.1 建立数学模型的一般步骤
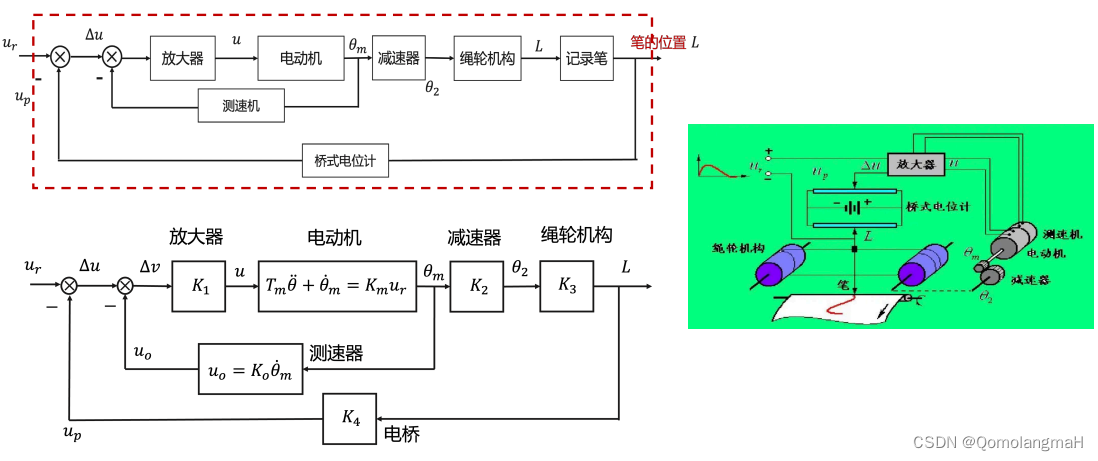
- 2.1.2 控制系统微分方程的列写
- 2.2 拉氏变换和反变换
- 2.2.1 拉氏变换的定义
- 2.2.2 典型函数的拉氏变换
- 2.2.3 拉氏变换的主要定理
- 2.2.4 拉氏反变换
- 2.2.5 应用拉氏变换求解线性微分方程
- 2.3 传递函数
- 2.3.1 传递函数的概念和定义
- 2.3.2 特征方程、零点和极点、(零点、极点分布图)
- 2.3.3 关于传递函数的几点说明
- 2.3.4 典型环节及其传递函数
- 2.3.5 根据系统运动的微分方程模型求传递函数
第2章 数学模型
基本概念
-
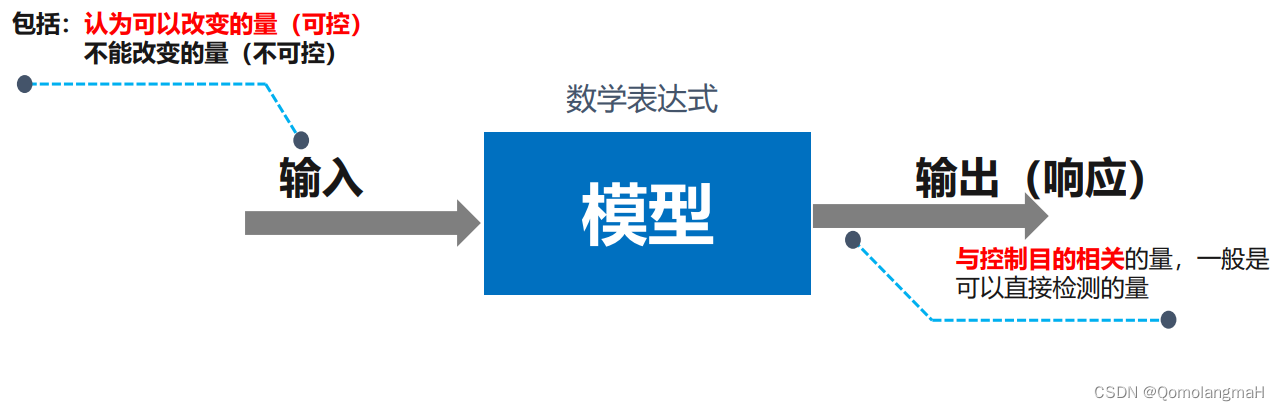
系统的数学模型,是描述系统输入、输出量以及内部各变量之间关系的数学表达式,它揭示了系统结构及其参数与其性能之间的内在关系。
-
系统数学模型有多种形式,这取决于变量和坐标系统的选择:
- 在时间域,通常采用**微分方程或一阶微分方程组(状态方程)**的形式;
- 在复数域则采用传递函数形式;
- 而在频率域采用频率特性形式。
2.1 控制系统的运动微分方程

-
微分方程的阶次——n
-
微分方程的解——**函数 **
-
微分方程的通解——包含任意n个常数的解
-
微分方程的特解
-
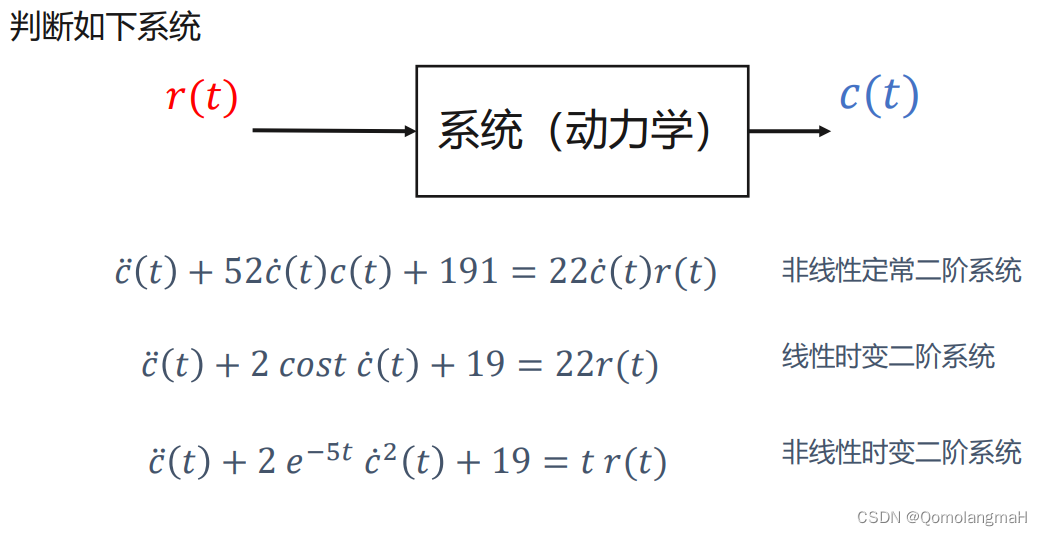
b. 线性定常系统微分方程的一般标准形式
- 什么是线性? ->满足叠加原理
- 什么是定常 (时不变) ?
- 什么是阶次?
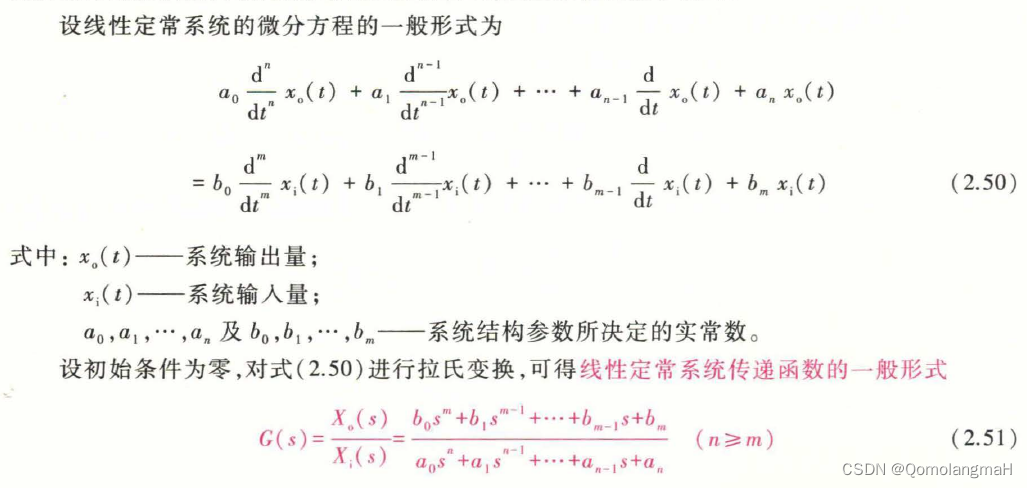
线性定常系统微分方程的一般形式:
2.1.1 建立数学模型的一般步骤
- 确定系统输入、输出
- 根据物理定律建立方程组
- 消去中间变量
- 画成标准形式
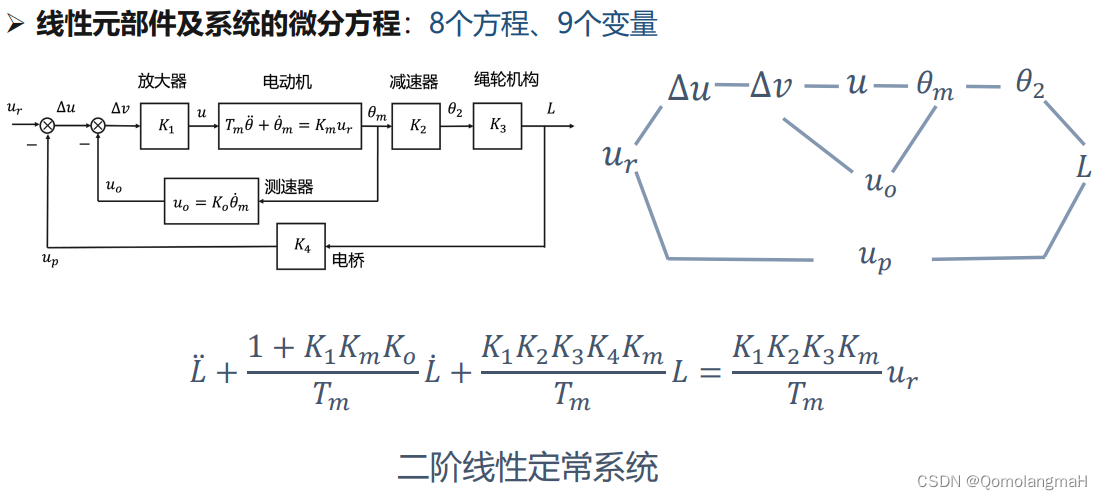
2.1.2 控制系统微分方程的列写
2.2 拉氏变换和反变换
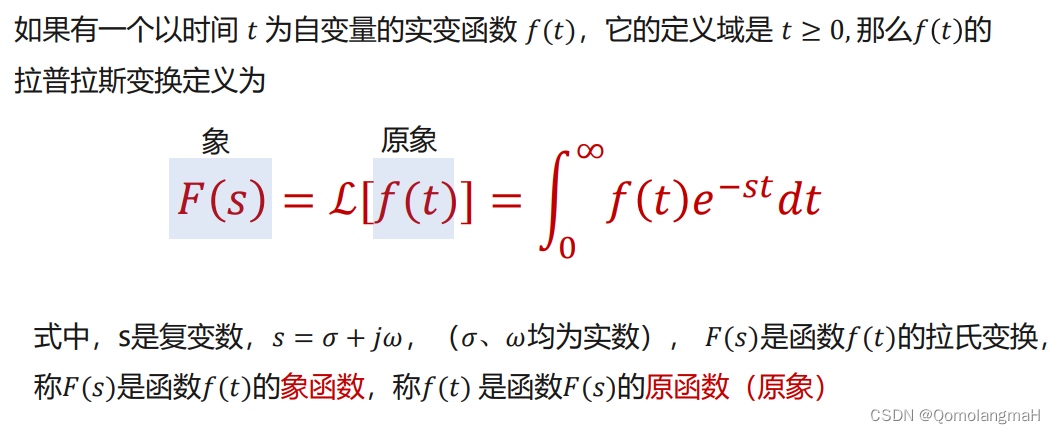
2.2.1 拉氏变换的定义
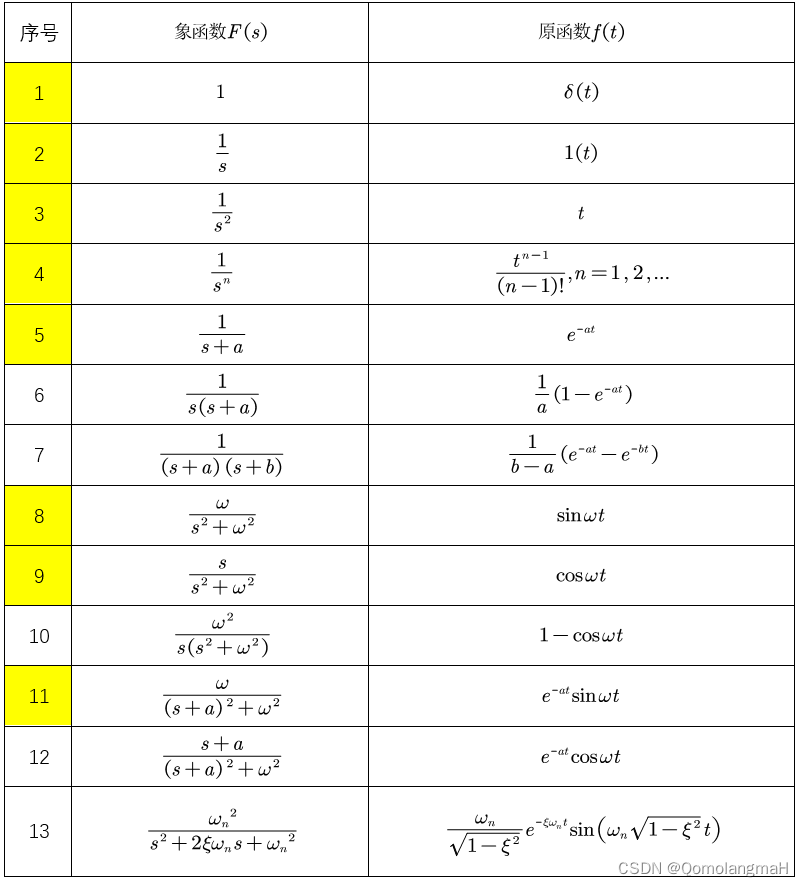
2.2.2 典型函数的拉氏变换
拉氏变换是一种线性变换,将变量从时间域变换到复数域,将微分方程变换为s 域中的代数方程来处理。
图源
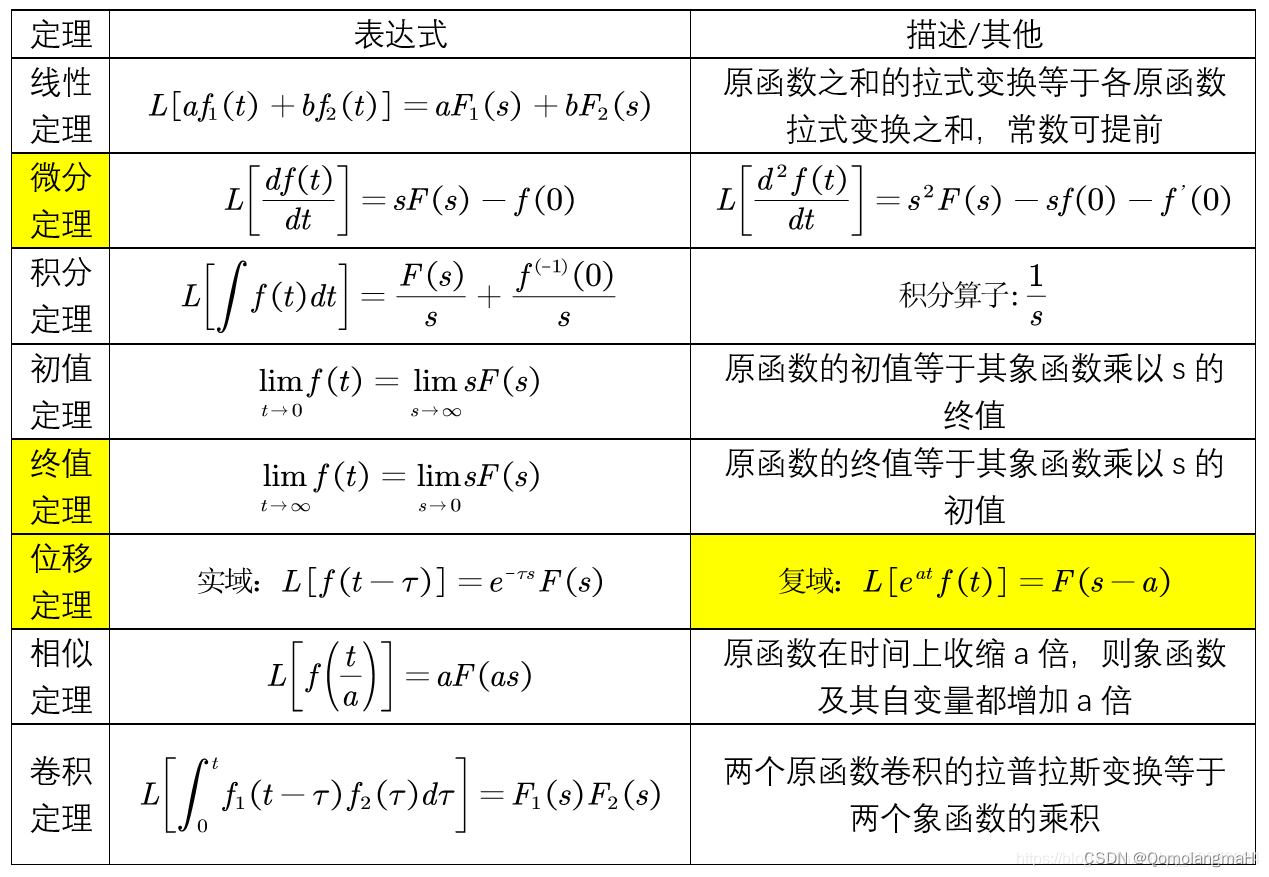
2.2.3 拉氏变换的主要定理
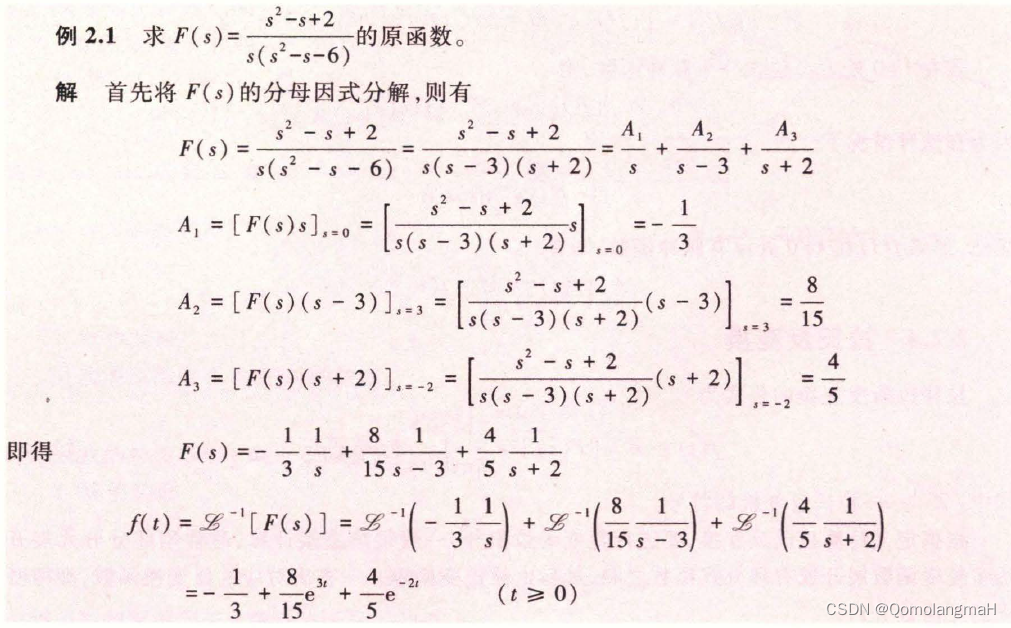
2.2.4 拉氏反变换
P 24
2.2.5 应用拉氏变换求解线性微分方程

2.3 传递函数
2.3.1 传递函数的概念和定义
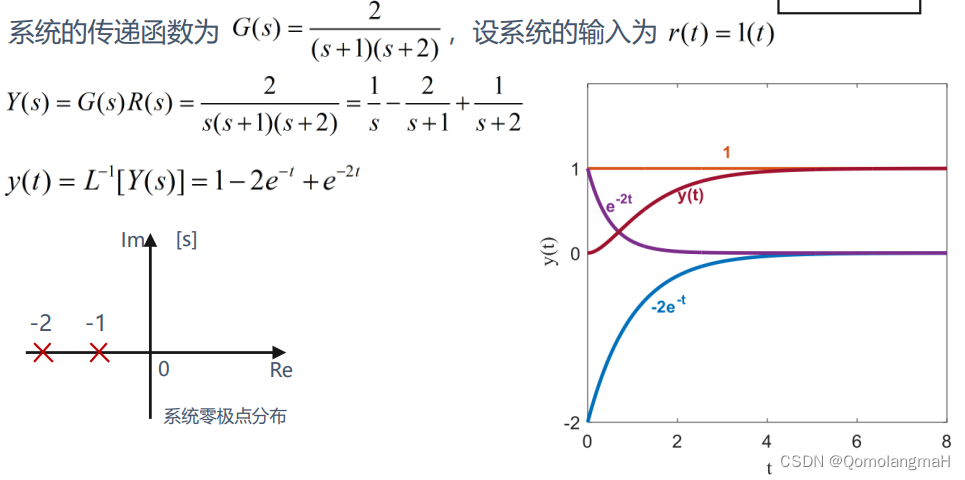
对于线性定常系统,在零初始条件下,系统输出量的拉氏变换与引起该输出的输入量的拉氏变换之比,称为系统的传递函数。
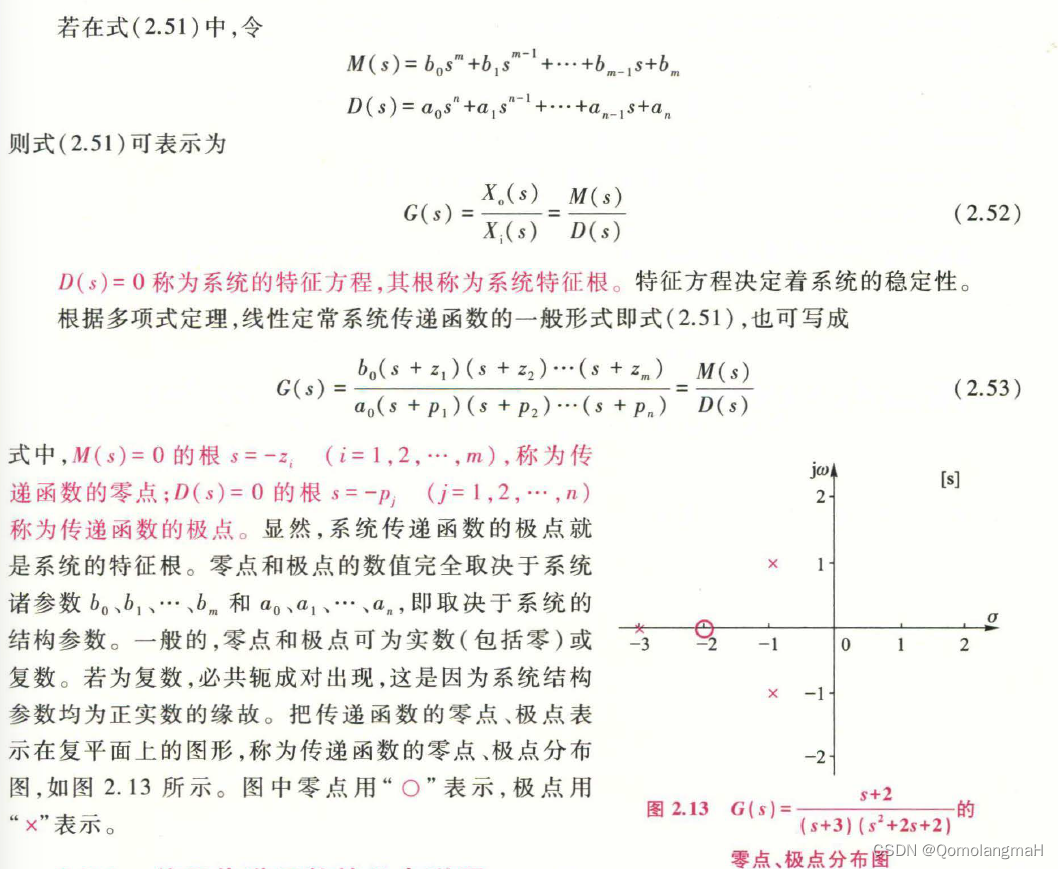
2.3.2 特征方程、零点和极点、(零点、极点分布图)
2.3.3 关于传递函数的几点说明
-
传递函数的概念只适用于** 线性定常系统!!!,它是在 零初始条件!!!**下定义的
-
传递函数是复变量s的有理分式函数,即: n>=m 各系数均为实数
-
传递函数是系统的数学描述。物理性质不同的系统可以具有相同的传递函数(相似系统)
-
在同一系统中,当取不同的物理量作输入或输出时,其传递函数也可以不同
-
传递函数是由相应的零、极点组成—与s平面零极点图对应
-
传递函数表示线性定常系统传递、变换输入信号的能力,全面反应系统本身的性能,只与系统或元件的结构和参数有关,与输入量的形式 (幅度、大小) 无关
-
传递函数的拉氏反变换是系统的脉冲响应 !!!*
-
极点的作用

-
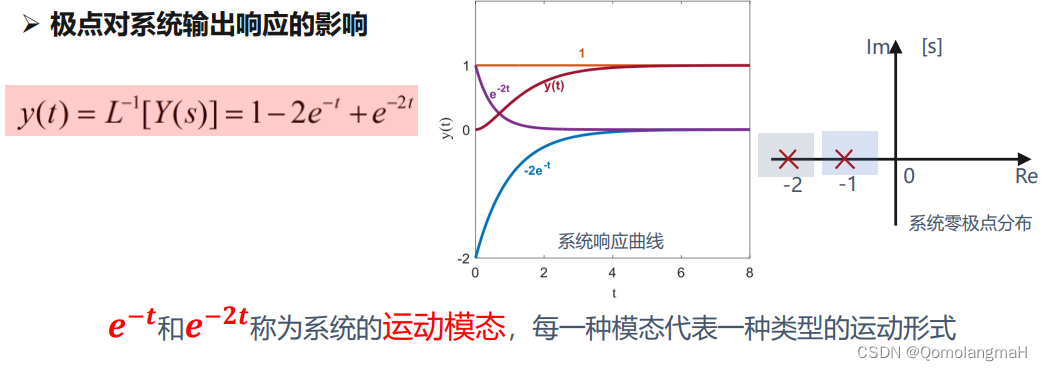
极点对系统输出响应的影响
-
系统自由运动模态由G(s)的极点决定,极点性质不同,其运动模态也不同
-
自由运动过程中,靠复平面虚轴最近的极点所对应的自由运动模态所占比重 最大,且衰减也是最慢 的,动态响应过程的大部分由该极点决定。
-
-
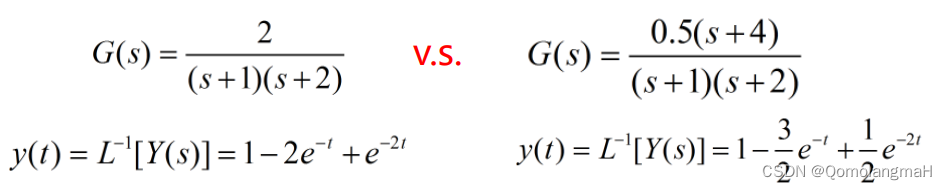
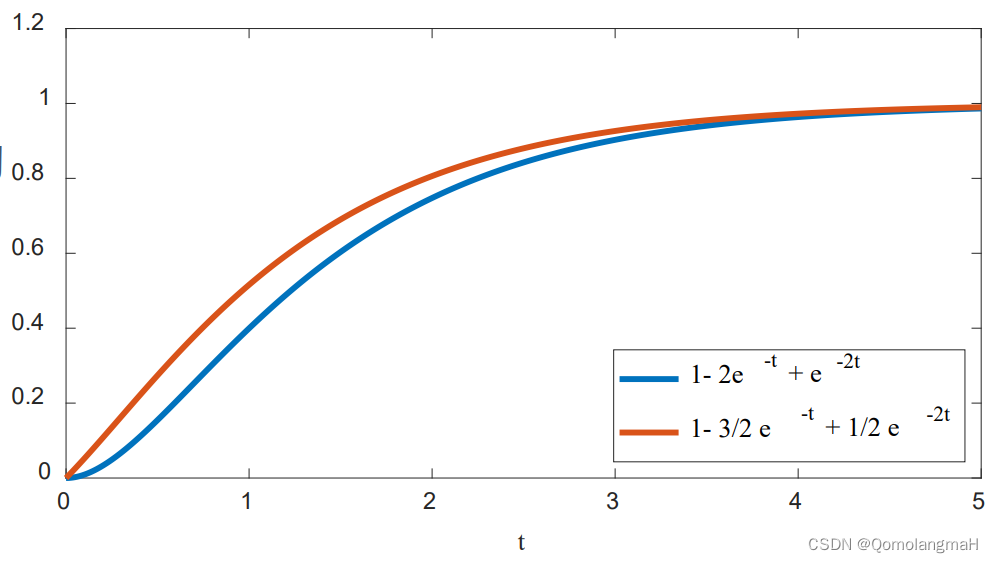
零点对系统输出的影响
-
-
零点不能形成运动模态
-
系统零点可以影响各个运动模态在响应中的比重
-
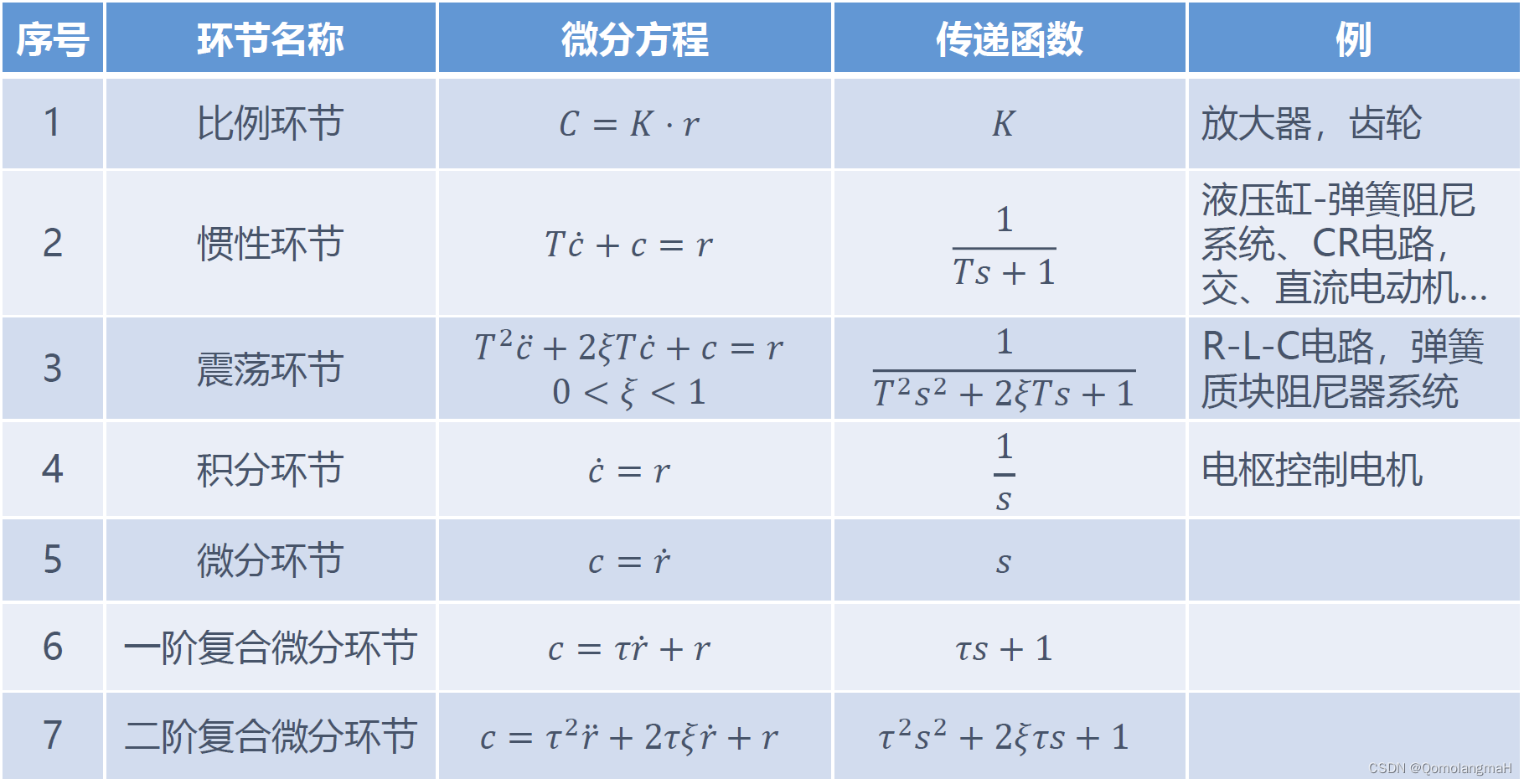
2.3.4 典型环节及其传递函数
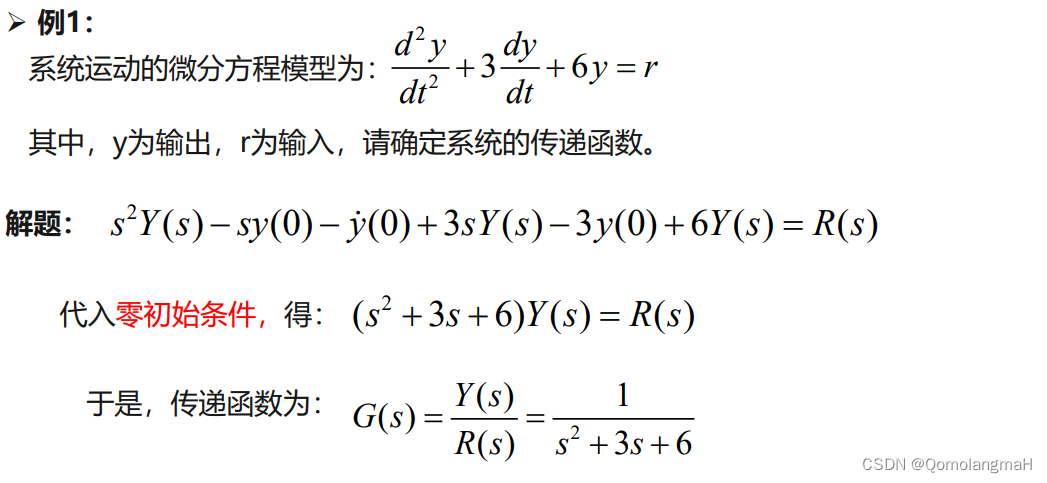
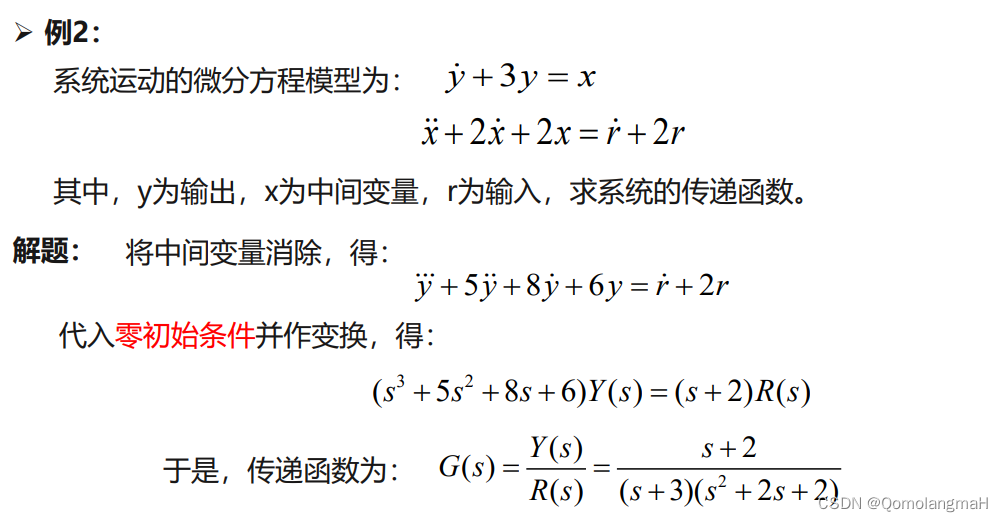
2.3.5 根据系统运动的微分方程模型求传递函数