欧最后有了一个需求,需要在ros中接两摄像头,完成后写一下步骤。
以下是我的设备,
 通过一个3.0的转接头来连接两个摄像头,
通过一个3.0的转接头来连接两个摄像头,
首先,通过下面的命令
ls /dev/video* //插上摄像头后打开终端查看是否检测到摄像头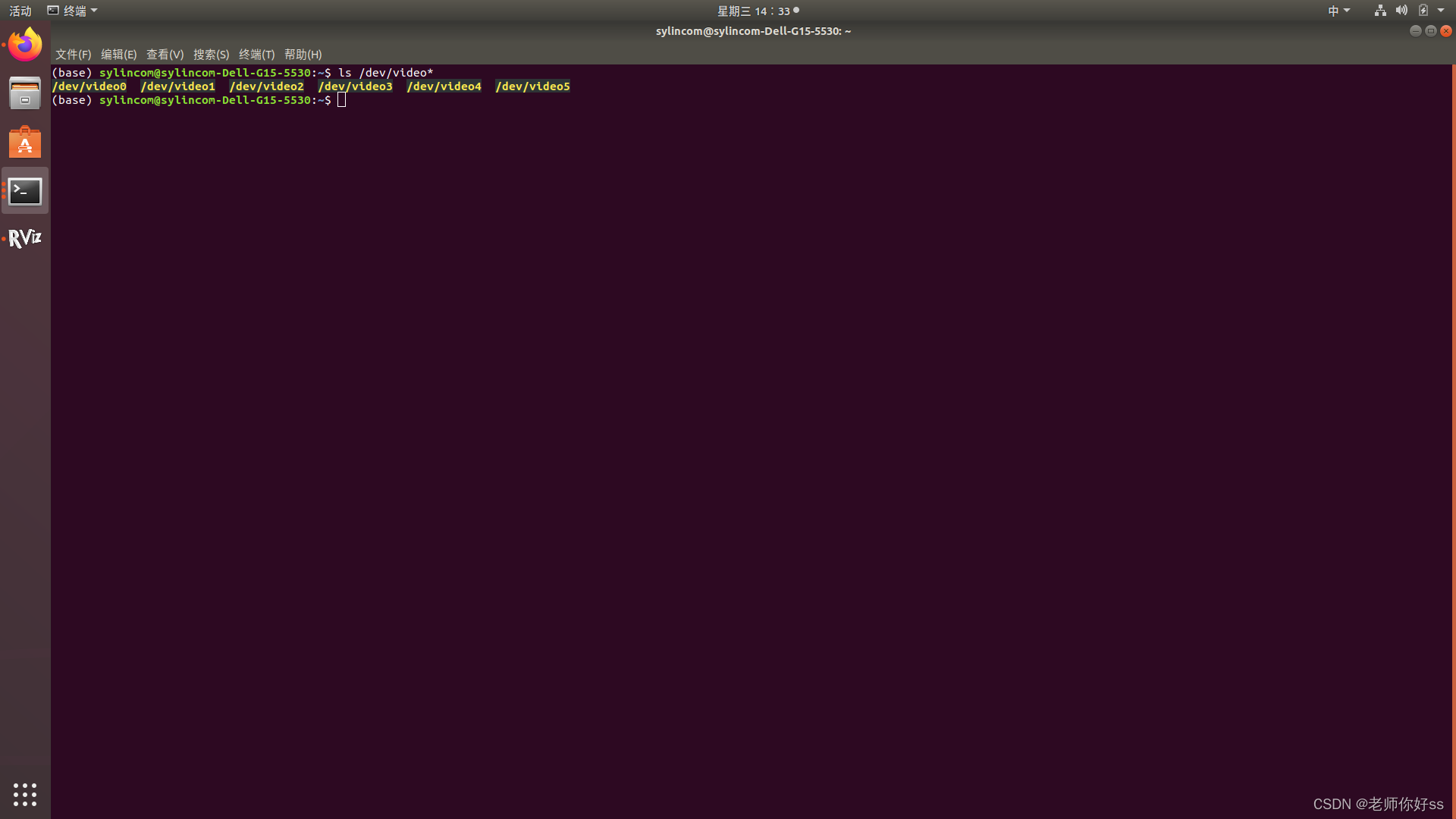
我这里显示5个设备号。下面是下载相机的文件。
mkdir -p camera_ws/src //新建工作空间
cd camera_ws/src/
catkin_init_workspace
git clone https://github.com/bosch-ros-pkg/usb_cam.git //克隆功能包
cd ..
catkin_make //编译注意:在编译时,最好在有opencv的工作空间下,可能报错
-- Checking for module 'libv4l2'
-- No package 'libv4l2' found
CMake Error at /usr/local/share/cmake-3.22/Modules/FindPkgConfig.cmake:603 (message):
A required package was not found
我是运行第2个命令:
sudo apt-get install libv4l2-dev //这个没有效果的话,执行下面的。
sudo apt-get install libv4l-dev我的设备号是video2与video4,下面进入修改,
<launch>
<group ns="camera1">
<node name="usb_cam1" pkg="usb_cam" type="usb_cam_node" output="screen" >
<param name="video_device" value="/dev/video2" />
<param name="image_width" value="640" />
<param name="image_height" value="480" />
<param name="pixel_format" value="yuyv" />
<param name="camera_frame_id" value="usb_cam" />
<param name="io_method" value="mmap"/>
</node>
</group>
<group ns="camera2">
<node name="usb_cam2" pkg="usb_cam" type="usb_cam_node" output="screen" >
<param name="video_device" value="/dev/video4" />
<param name="image_width" value="640" />
<param name="image_height" value="480" />
<param name="pixel_format" value="yuyv" />
<param name="camera_frame_id" value="usb_cam" />
<param name="io_method" value="mmap"/>
</node>
</group>
<node name="image_view" pkg="image_view" type="image_view" respawn="false" output="screen">
<remap from="image" to="/usb_cam/image_raw"/>
<param name="autosize" value="true" />
</node>
</launch>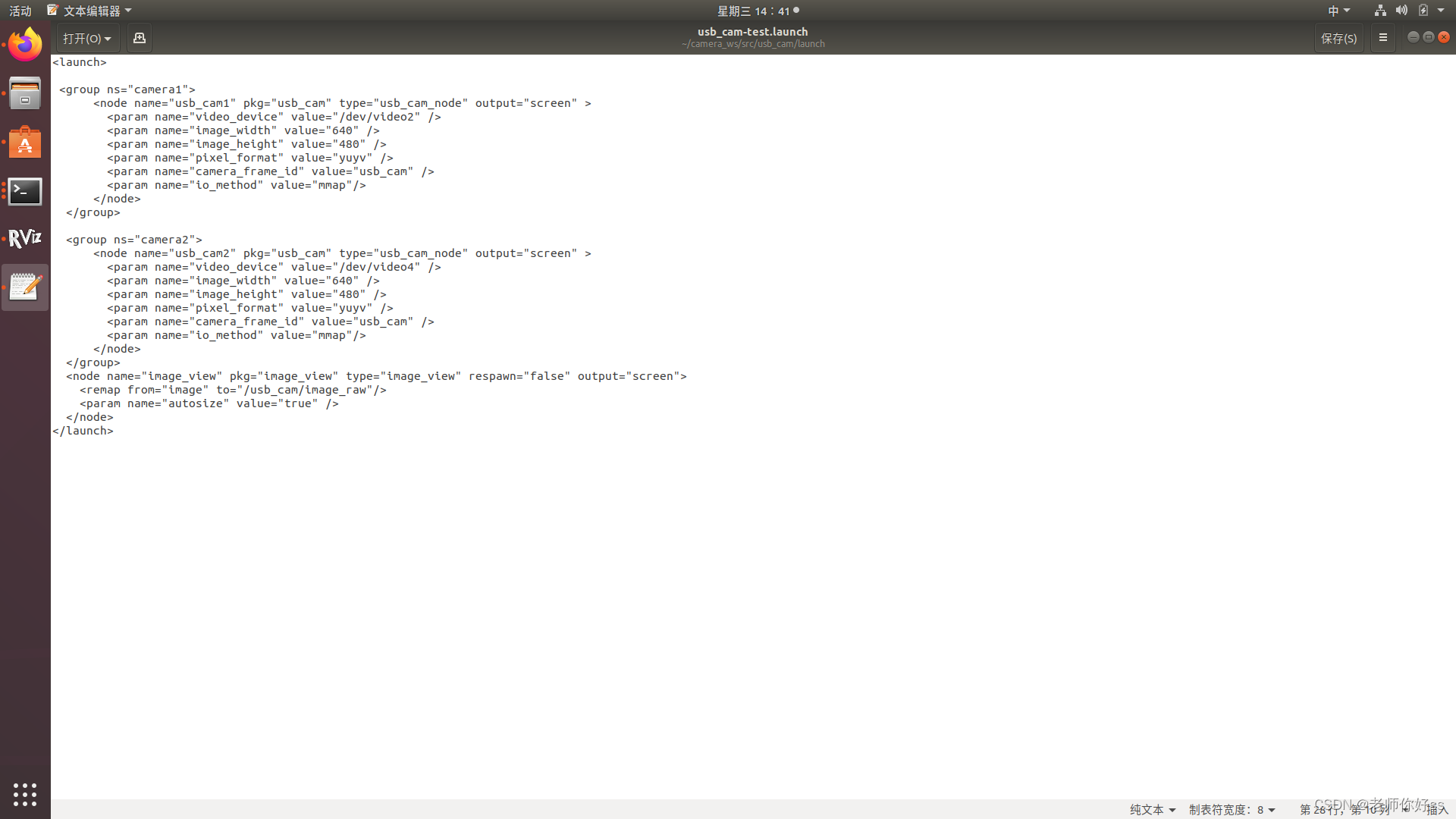
运行下面的命令
roscore
cd ~/camera_ws
source devel/setup.bash
roslaunch usb_cam usb_cam-test.launch
打开一个新终端
rosrun rviz rviz在rviz 界面,点击Add---By topic---/usb_cam---/image-raw---image
参考 在ros中用usb_cam连接两个相机_ros下调用多个摄像头-CSDN博客文章浏览阅读1.1k次。在ros中用usb_cam连接两个相机_ros下调用多个摄像头https://blog.csdn.net/weixin_42135969/article/details/127246204ROS下使用单目/双目摄像头发布图像话题_ros发布摄像头内容_大聪明墨菲特的博客-CSDN博客文章浏览阅读2.4k次,点赞4次,收藏40次。在ros下用usb_cam包发布单目和双目摄像头的图像话题消息_ros发布摄像头内容
https://blog.csdn.net/weixin_53073284/article/details/125671358