yolox代码
- yolox结构瞄一眼
- net代码
- 常规conv
- DWConv
- 第一步
- 第二步
- CBA一套
- Focus
- SPP
- CSPDarknet
- FPN
- PAN
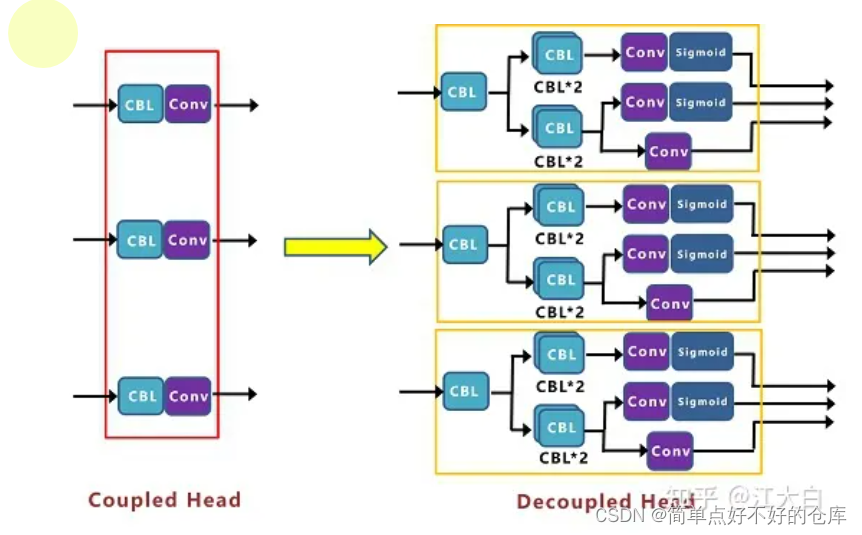
- decoupled predict head
- ref
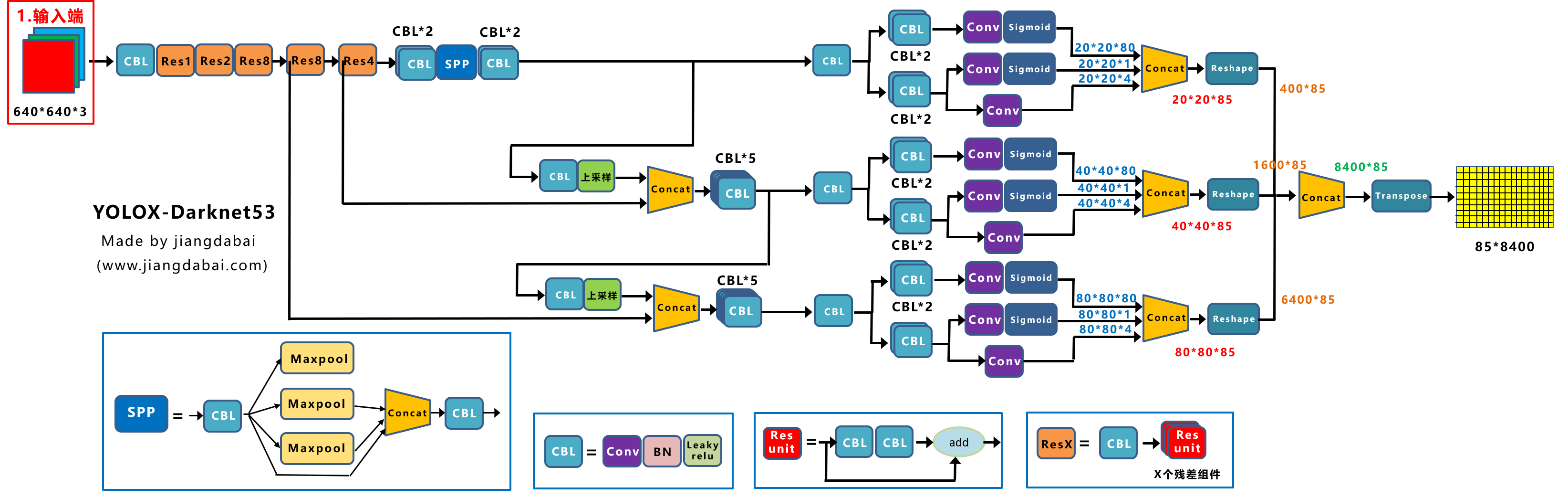
yolox结构瞄一眼
net代码
#!/usr/bin/env python3
# -*- coding:utf-8 -*-
# Copyright (c) Megvii, Inc. and its affiliates.
import torch
from torch import nn
class SiLU(nn.Module):
@staticmethod
def forward(x):
#静态方法
return x * torch.sigmoid(x)
def get_activation(name="silu", inplace=True):
#根据name,构造module
if name == "silu":
module = SiLU()
elif name == "relu":
module = nn.ReLU(inplace=inplace)
elif name == "lrelu":
module = nn.LeakyReLU(0.1, inplace=inplace)
else:
raise AttributeError("Unsupported act type: {}".format(name))
return module
class Focus(nn.Module):
def __init__(self, in_channels, out_channels, ksize=1, stride=1, act="silu"):
super().__init__()
#标准卷积组合块CBA
self.conv = BaseConv(in_channels * 4, out_channels, ksize, stride, act=act)
def forward(self, x):
#4块区域,stride=2
patch_top_left = x[..., ::2, ::2]
patch_bot_left = x[..., 1::2, ::2]
patch_top_right = x[..., ::2, 1::2]
patch_bot_right = x[..., 1::2, 1::2]
#cat 堆叠
x = torch.cat((patch_top_left, patch_bot_left, patch_top_right, patch_bot_right,), dim=1,)
return self.conv(x)
class BaseConv(nn.Module):
def __init__(self, in_channels, out_channels, ksize, stride, groups=1, bias=False, act="silu"):
super().__init__()
pad = (ksize - 1) // 2
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size=ksize, stride=stride, padding=pad, groups=groups, bias=bias)
self.bn = nn.BatchNorm2d(out_channels, eps=0.001, momentum=0.03)
self.act = get_activation(act, inplace=True)
def forward(self, x):
return self.act(self.bn(self.conv(x)))
def fuseforward(self, x):#不经过bn操作
return self.act(self.conv(x))
class DWConv(nn.Module):
def __init__(self, in_channels, out_channels, ksize, stride=1, act="silu"):
super().__init__()
self.dconv = BaseConv(in_channels, in_channels, ksize=ksize, stride=stride, groups=in_channels, act=act,) #不扩展通道,进行宽高信息混合
self.pconv = BaseConv(in_channels, out_channels, ksize=1, stride=1, groups=1, act=act) #pointwise进行通道上的信息混合
def forward(self, x):
x = self.dconv(x)
return self.pconv(x)
class SPPBottleneck(nn.Module):
def __init__(self, in_channels, out_channels, kernel_sizes=(5, 9, 13), activation="silu"):
super().__init__()
hidden_channels = in_channels // 2
self.conv1 = BaseConv(in_channels, hidden_channels, 1, stride=1, act=activation)
self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=ks, stride=1, padding=ks // 2) for ks in kernel_sizes])
conv2_channels = hidden_channels * (len(kernel_sizes) + 1)
self.conv2 = BaseConv(conv2_channels, out_channels, 1, stride=1, act=activation)
def forward(self, x):
x = self.conv1(x)
x = torch.cat([x] + [m(x) for m in self.m], dim=1)
x = self.conv2(x)
return x
#--------------------------------------------------#
# 残差结构的构建,小的残差结构
#--------------------------------------------------#
class Bottleneck(nn.Module):
# Standard bottleneck
def __init__(self, in_channels, out_channels, shortcut=True, expansion=0.5, depthwise=False, act="silu",):
super().__init__()
hidden_channels = int(out_channels * expansion)
Conv = DWConv if depthwise else BaseConv
#--------------------------------------------------#
# 利用1x1卷积进行通道数的缩减。缩减率一般是50%
#--------------------------------------------------#
self.conv1 = BaseConv(in_channels, hidden_channels, 1, stride=1, act=act)
#--------------------------------------------------#
# 利用3x3卷积进行通道数的拓张。并且完成特征提取
#--------------------------------------------------#
self.conv2 = Conv(hidden_channels, out_channels, 3, stride=1, act=act)
self.use_add = shortcut and in_channels == out_channels
def forward(self, x):
y = self.conv2(self.conv1(x))
if self.use_add:
y = y + x
return y
class CSPLayer(nn.Module):
def __init__(self, in_channels, out_channels, n=1, shortcut=True, expansion=0.5, depthwise=False, act="silu",):
# ch_in, ch_out, number, shortcut, groups, expansion
super().__init__()
hidden_channels = int(out_channels * expansion)
#--------------------------------------------------#
# 主干部分的初次卷积
#--------------------------------------------------#
self.conv1 = BaseConv(in_channels, hidden_channels, 1, stride=1, act=act)
#--------------------------------------------------#
# 大的残差边部分的初次卷积
#--------------------------------------------------#
self.conv2 = BaseConv(in_channels, hidden_channels, 1, stride=1, act=act)
#-----------------------------------------------#
# 对堆叠的结果进行卷积的处理
#-----------------------------------------------#
self.conv3 = BaseConv(2 * hidden_channels, out_channels, 1, stride=1, act=act)
#--------------------------------------------------#
# 根据循环的次数构建上述Bottleneck残差结构
#--------------------------------------------------#
module_list = [Bottleneck(hidden_channels, hidden_channels, shortcut, 1.0, depthwise, act=act) for _ in range(n)]
self.m = nn.Sequential(*module_list)
def forward(self, x):
#-------------------------------#
# x_1是主干部分
#-------------------------------#
x_1 = self.conv1(x)
#-------------------------------#
# x_2是大的残差边部分
#-------------------------------#
x_2 = self.conv2(x)
#-----------------------------------------------#
# 主干部分利用残差结构堆叠继续进行特征提取
#-----------------------------------------------#
x_1 = self.m(x_1)
#-----------------------------------------------#
# 主干部分和大的残差边部分进行堆叠
#-----------------------------------------------#
x = torch.cat((x_1, x_2), dim=1)
#-----------------------------------------------#
# 对堆叠的结果进行卷积的处理
#-----------------------------------------------#
return self.conv3(x)
class CSPDarknet(nn.Module):
def __init__(self, dep_mul, wid_mul, out_features=("dark3", "dark4", "dark5"), depthwise=False, act="silu",):
super().__init__()
assert out_features, "please provide output features of Darknet"
self.out_features = out_features
Conv = DWConv if depthwise else BaseConv
#-----------------------------------------------#
# 输入图片是640, 640, 3
# 初始的基本通道是64
#-----------------------------------------------#
base_channels = int(wid_mul * 64) # 64
base_depth = max(round(dep_mul * 3), 1) # 3
#-----------------------------------------------#
# 利用focus网络结构进行特征提取
# 640, 640, 3 -> 320, 320, 12 -> 320, 320, 64
#-----------------------------------------------#
self.stem = Focus(3, base_channels, ksize=3, act=act)
#-----------------------------------------------#
# 完成卷积之后,320, 320, 64 -> 160, 160, 128
# 完成CSPlayer之后,160, 160, 128 -> 160, 160, 128
#-----------------------------------------------#
self.dark2 = nn.Sequential(
Conv(base_channels, base_channels * 2, 3, 2, act=act),
CSPLayer(base_channels * 2, base_channels * 2, n=base_depth, depthwise=depthwise, act=act),
)
#-----------------------------------------------#
# 完成卷积之后,160, 160, 128 -> 80, 80, 256
# 完成CSPlayer之后,80, 80, 256 -> 80, 80, 256
#-----------------------------------------------#
self.dark3 = nn.Sequential(
Conv(base_channels * 2, base_channels * 4, 3, 2, act=act),
CSPLayer(base_channels * 4, base_channels * 4, n=base_depth * 3, depthwise=depthwise, act=act),
)
#-----------------------------------------------#
# 完成卷积之后,80, 80, 256 -> 40, 40, 512
# 完成CSPlayer之后,40, 40, 512 -> 40, 40, 512
#-----------------------------------------------#
self.dark4 = nn.Sequential(
Conv(base_channels * 4, base_channels * 8, 3, 2, act=act),
CSPLayer(base_channels * 8, base_channels * 8, n=base_depth * 3, depthwise=depthwise, act=act),
)
#-----------------------------------------------#
# 完成卷积之后,40, 40, 512 -> 20, 20, 1024
# 完成SPP之后,20, 20, 1024 -> 20, 20, 1024
# 完成CSPlayer之后,20, 20, 1024 -> 20, 20, 1024
#-----------------------------------------------#
self.dark5 = nn.Sequential(
Conv(base_channels * 8, base_channels * 16, 3, 2, act=act),
SPPBottleneck(base_channels * 16, base_channels * 16, activation=act),
CSPLayer(base_channels * 16, base_channels * 16, n=base_depth, shortcut=False, depthwise=depthwise, act=act),
)
def forward(self, x):
outputs = {}
x = self.stem(x)
outputs["stem"] = x
x = self.dark2(x)
outputs["dark2"] = x
#-----------------------------------------------#
# dark3的输出为80, 80, 256,是一个有效特征层
#-----------------------------------------------#
x = self.dark3(x)
outputs["dark3"] = x
#-----------------------------------------------#
# dark4的输出为40, 40, 512,是一个有效特征层
#-----------------------------------------------#
x = self.dark4(x)
outputs["dark4"] = x
#-----------------------------------------------#
# dark5的输出为20, 20, 1024,是一个有效特征层
#-----------------------------------------------#
x = self.dark5(x)
outputs["dark5"] = x
return {k: v for k, v in outputs.items() if k in self.out_features}
if __name__ == '__main__':
print(CSPDarknet(1, 1))
常规conv
height: h
width:w
stride: sd
padding :p
kernel size : ksize
卷积核大小为: h * w *1
卷积需要做多少次:nums = [(h - k + 2 * p) / sd ] * [(w - k + 2 * p) / sd]
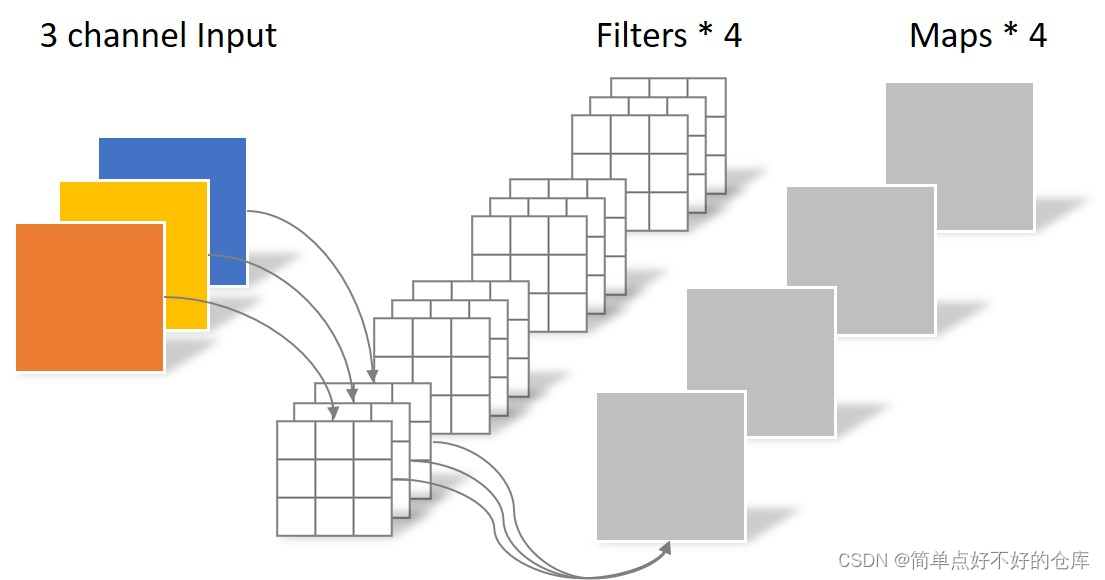
计算量:((in_channels * ksize * ksize) * nums ) * out_channels
DWConv
第一步
height: h
width:w
stride: sd
padding :p
kernel size : ksize
卷积核大小为: h * w *1
卷积需要做多少次:nums = [(h - k + 2 * p) / sd ] * [(w - k + 2 * p) / sd]
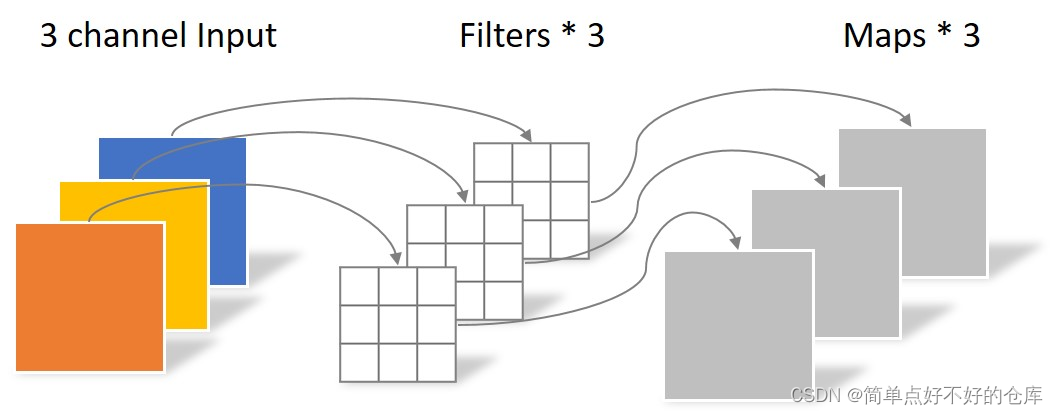
in_channles = out_channels
计算量: in_channels * (ksize * ksize * 1) * nums
第二步
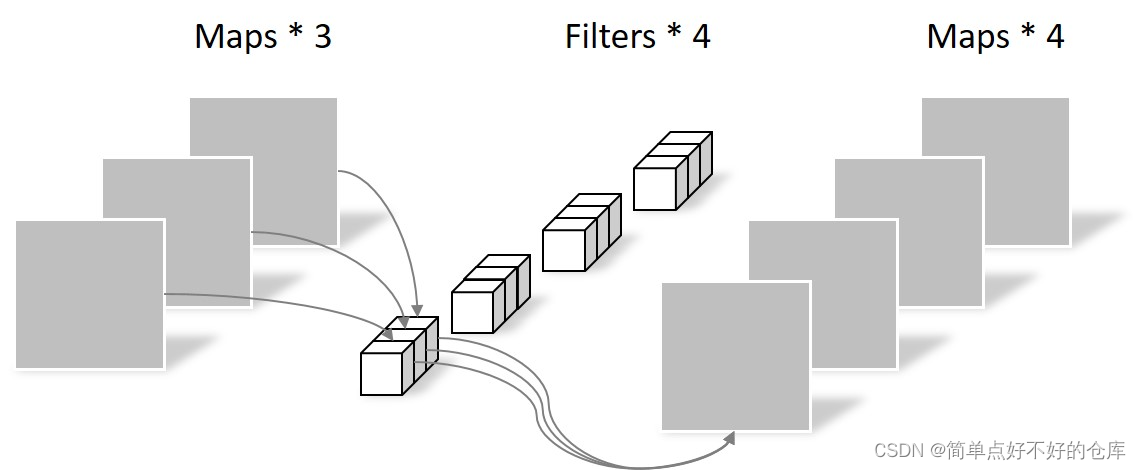
一次整图卷积次数: nums1 = (h + 2 * p) * (w + 2 * p)
计算量: nums1 * (1 * 1 * in_channels) * out_channels
CBA一套
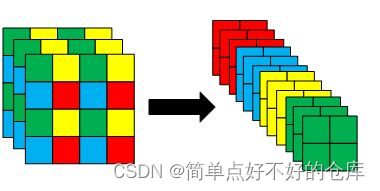
Focus
降维提取 + 拓展通道
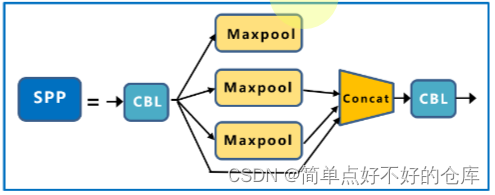
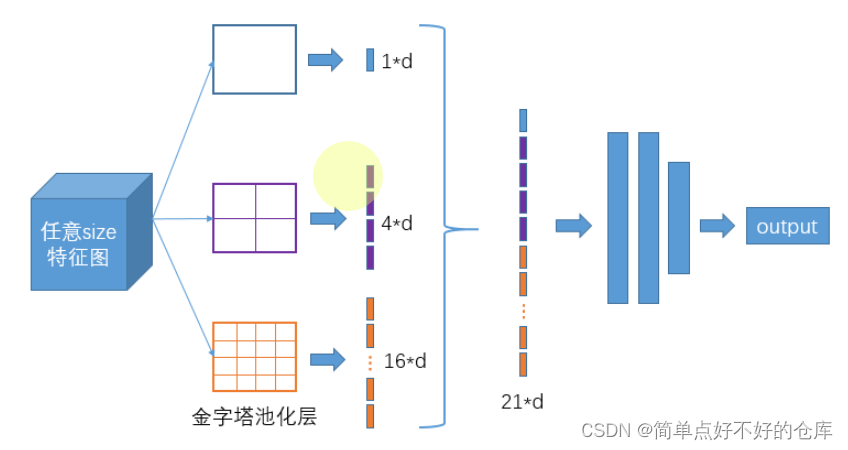
SPP
不同pooling的堆叠,堆叠不同视野
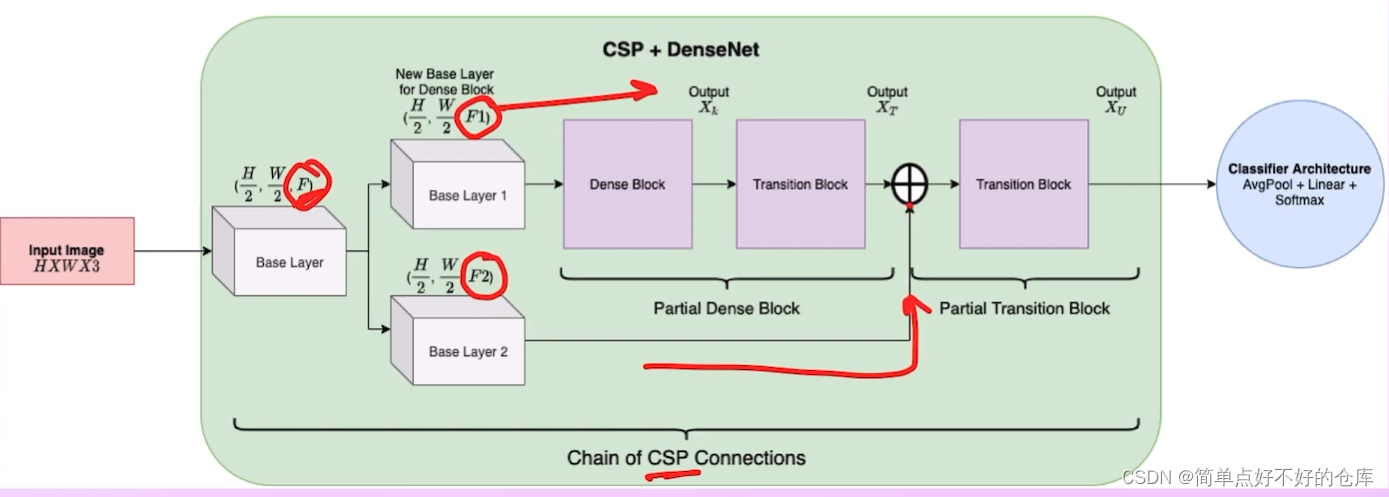
CSPDarknet
通道分成部分+残差设计
FPN
分辨率和语义的关系:

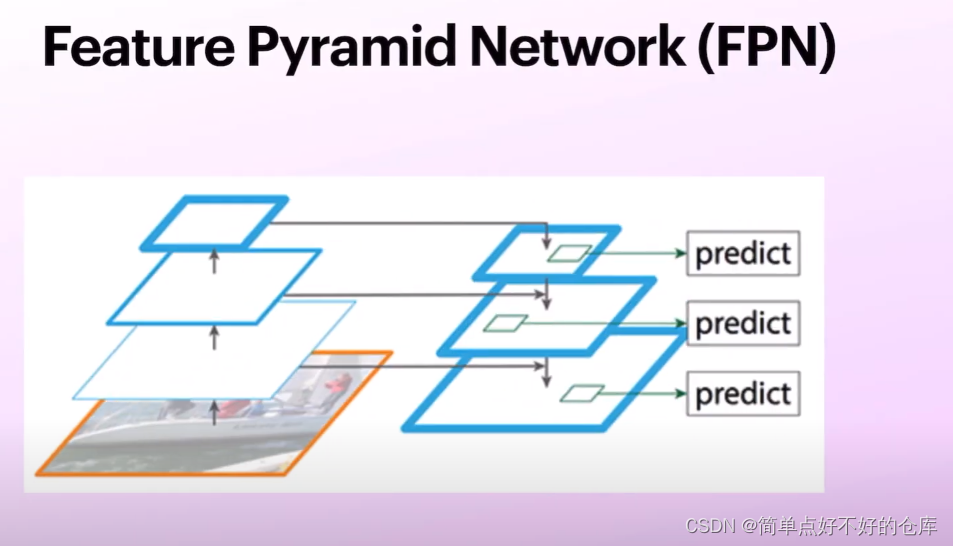
高层次低分辨率但是高语义
融合低分辨率位置信息和高语义信息
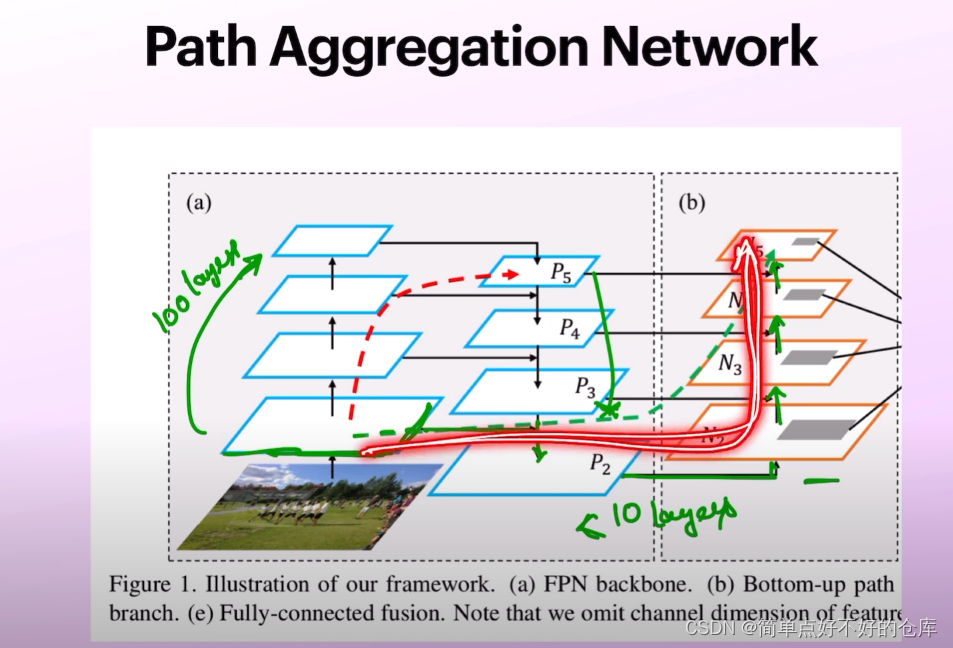
PAN
path segmentation network
多一条信息流路径,更短的流动路径
左边可能100层,右边可能<10层
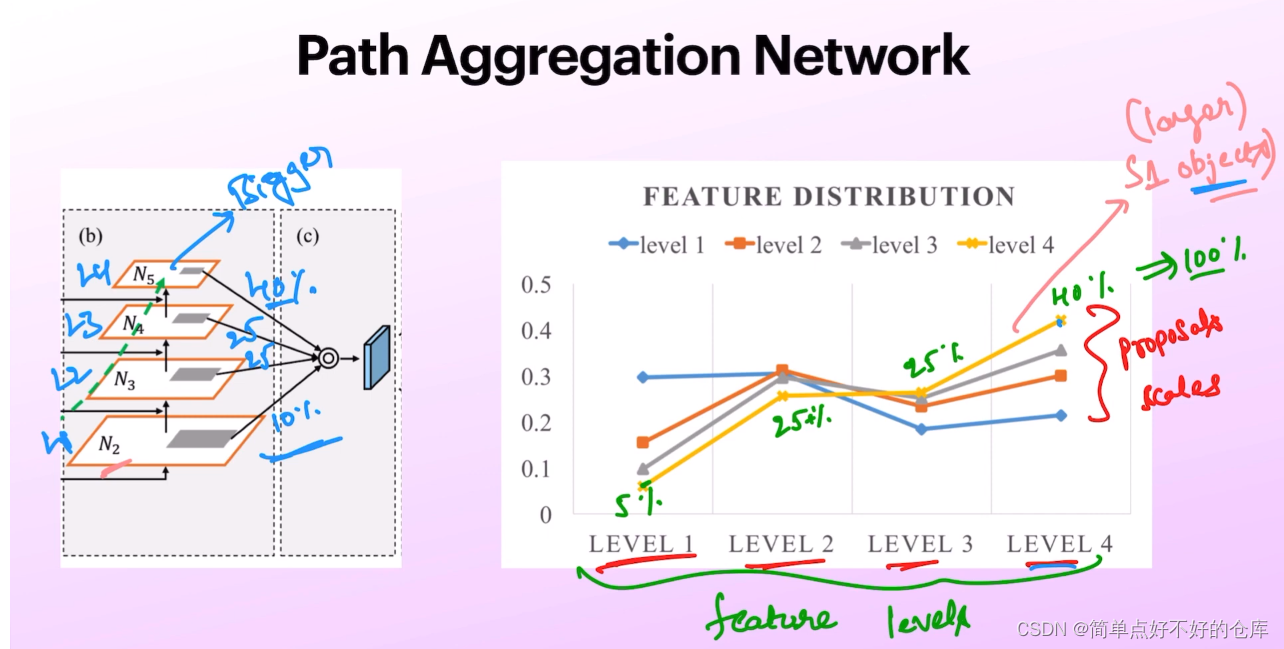
不同层的信息参考度不同
上述传送门
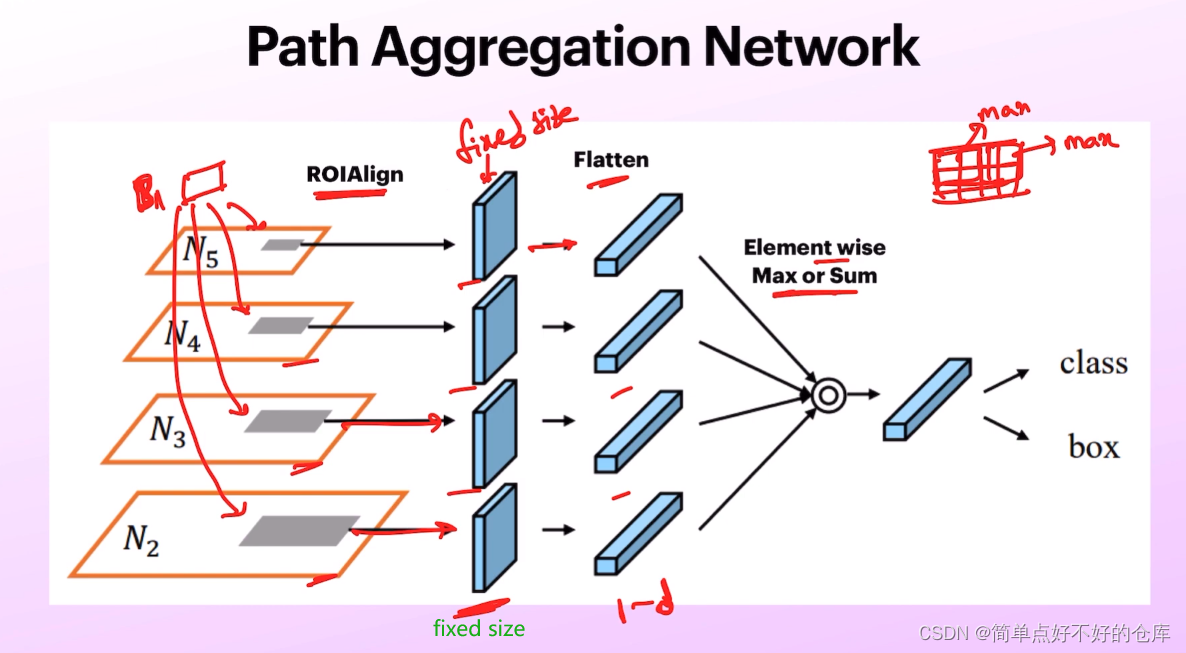
decoupled predict head
ref
1