目录
- 第五章 雅可比:速度和静力
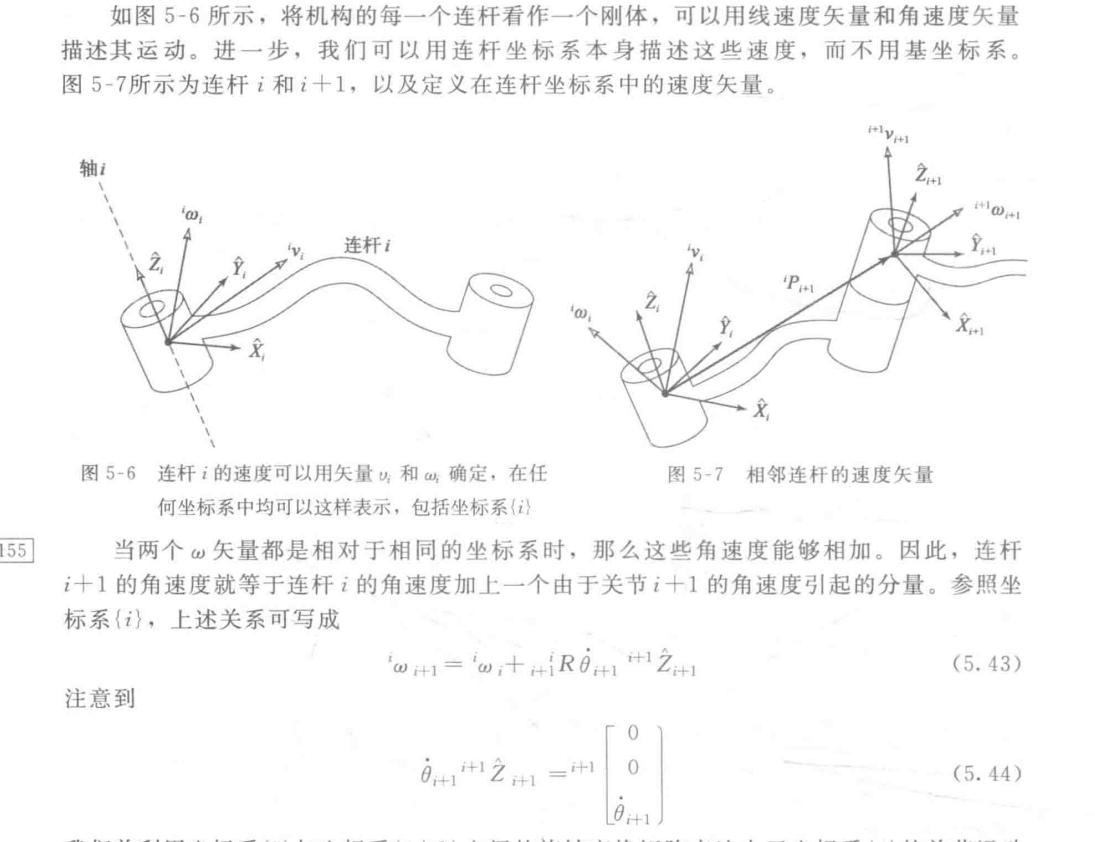
- 5.1 刚体的线速度和角速度
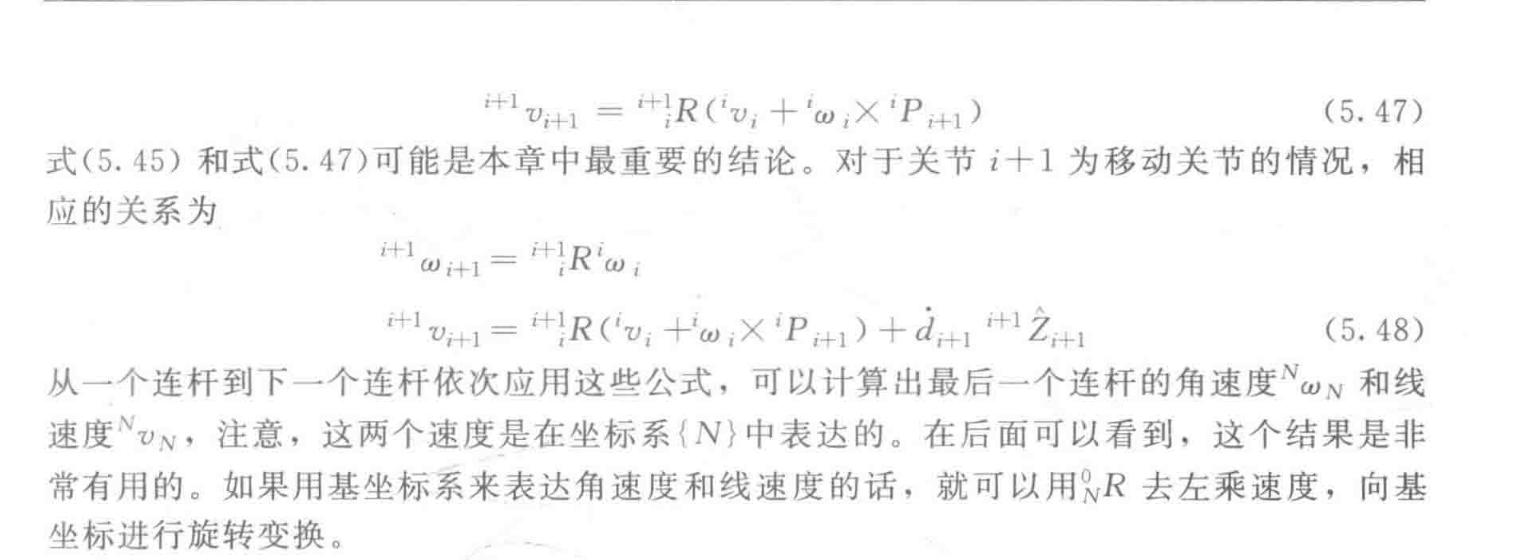
- 5.5 机器人连杆运动
第五章 雅可比:速度和静力
5.1 刚体的线速度和角速度
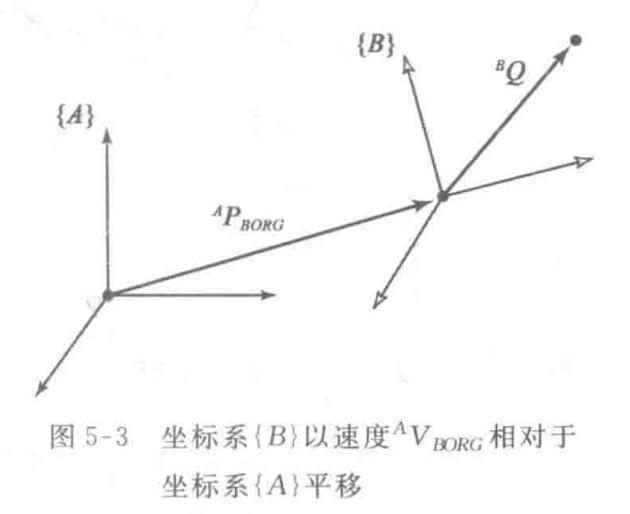
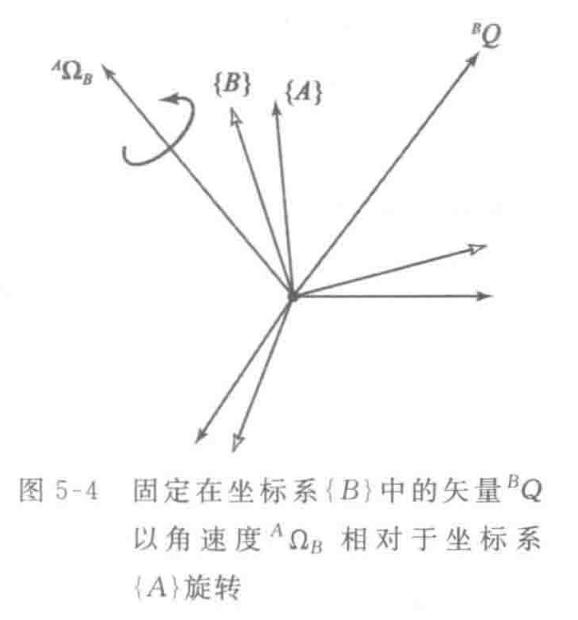
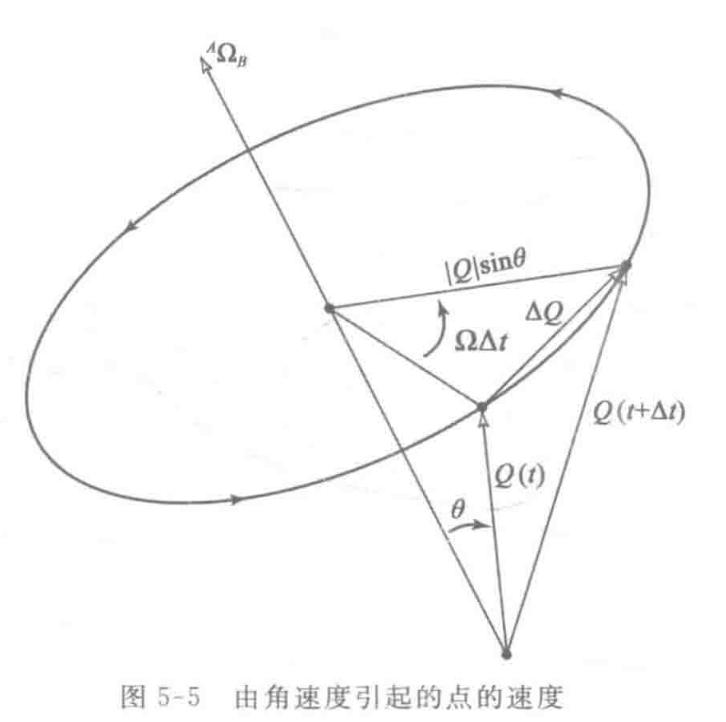
 \(V_{BORG}\)是坐标系B在A坐标系下的速度,\(^BV_Q\)是B坐标系下Q的速度,\(^A\Omega\)表示从坐标系A观测时,矢量Q的运动是绕着\(^A\Omega\)旋转的
\(V_{BORG}\)是坐标系B在A坐标系下的速度,\(^BV_Q\)是B坐标系下Q的速度,\(^A\Omega\)表示从坐标系A观测时,矢量Q的运动是绕着\(^A\Omega\)旋转的
5.5 机器人连杆运动

\(V_{BORG}\)是坐标系B在A坐标系下的速度,\(^BV_Q\)是B坐标系下Q的速度,\(^A\Omega\)表示从坐标系A观测时,矢量Q的运动是绕着\(^A\Omega\)旋转的
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1135694.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!




![[奇奇怪怪符号]输入法手动输入希腊字母](https://img-blog.csdnimg.cn/dae1b8746f6f45ffbc9b6d28ab9e0777.png#pic_center)