文章目录
- 优先级采样
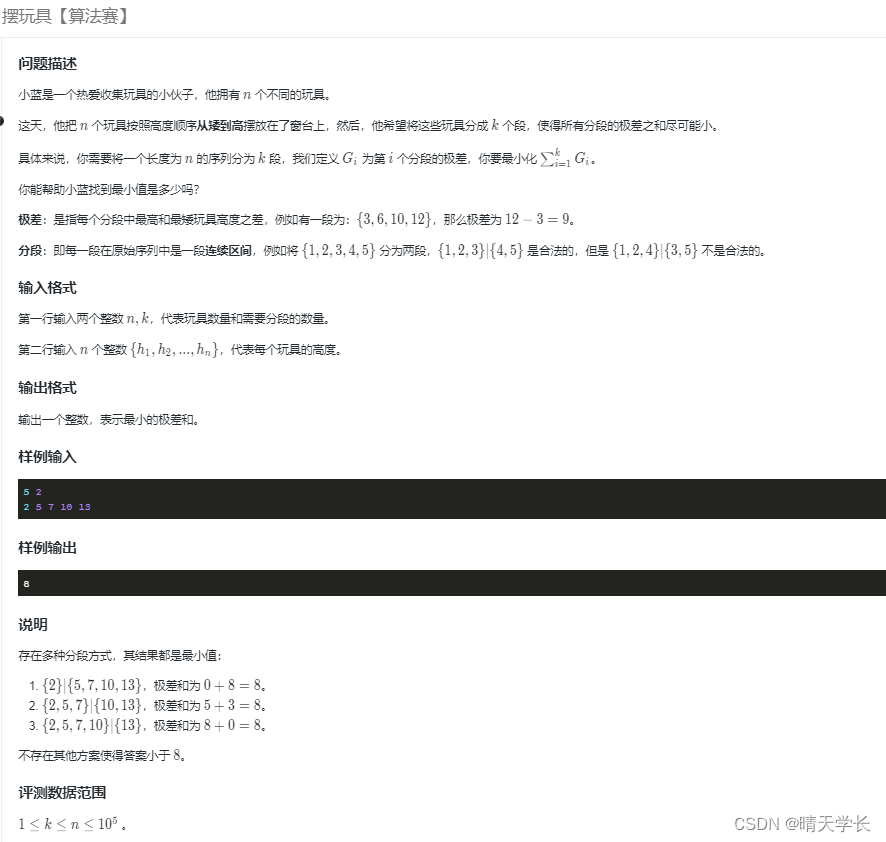
- Example1 Prioritized Sweepingon Mazes
- 局限性及改进
- 期望更新和采样更新
- 不同分支因子下的表现
- 轨迹采样
- 总结
- 实时动态规划
- Example2 racetrack
- 决策时规划
- 启发式搜索
- Rollout算法
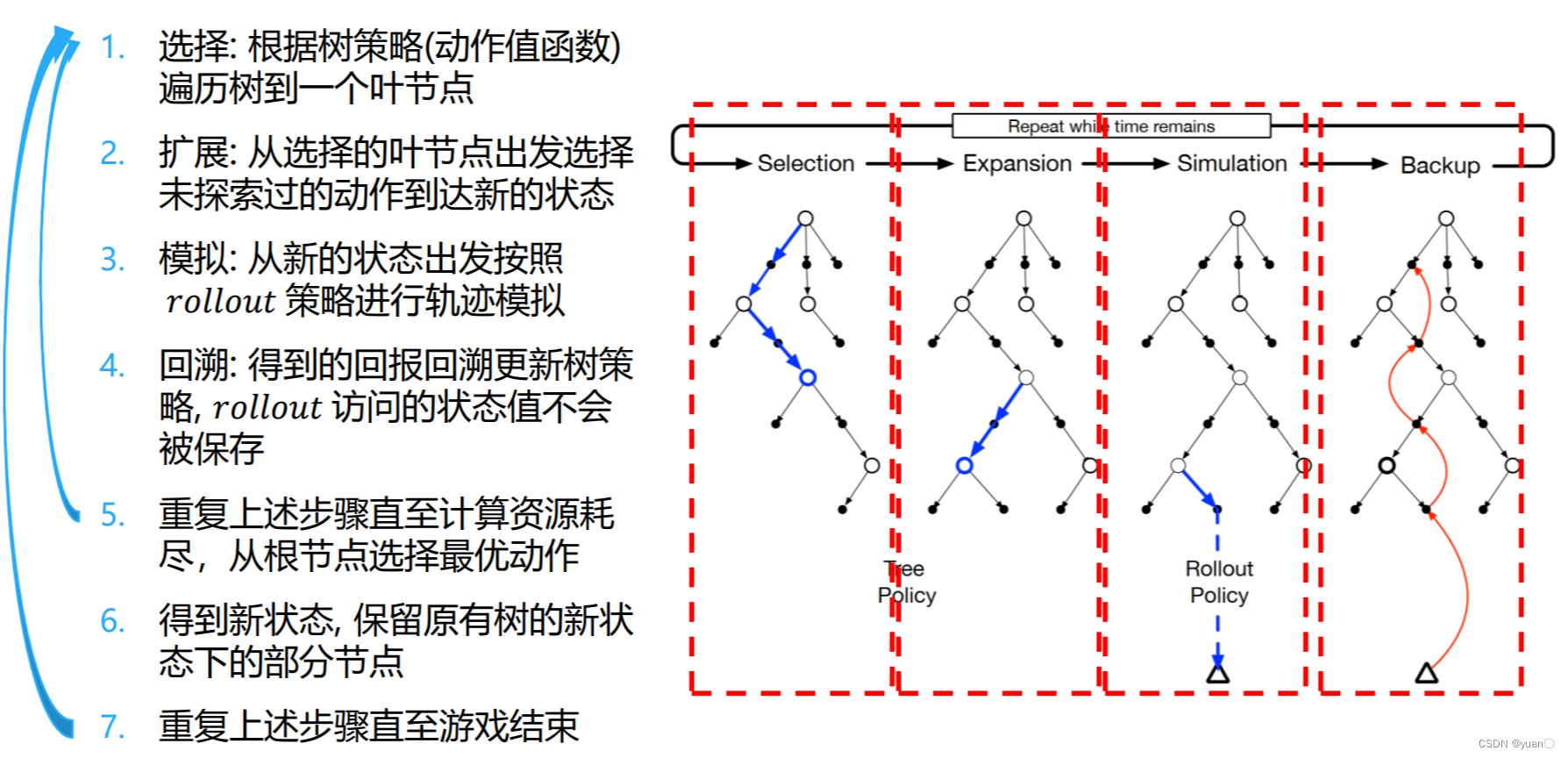
- 蒙特卡洛树搜索
- 参考
先做个简单的笔记整理,以后有时间再补上细节
优先级采样
均匀随机采样(uniformly sampling)会使得部分采样的结果对实际的更新毫无作用。如下图所示,在开始时,只有靠近终点部分的更新会产生作用,而其他情况则不会。因此,模拟的经验和更新应集中在一些特殊的状态动作。

可以使用后向聚焦(backward focusing)进行更好地更新。 后向聚焦是指很多状态的值发生变化带动前继状态的值发生变化。但有的值改变很多,有的改变很少,因此需要根据紧急程度,给这些更新设置优先度进行更新。
优先级采样(Prioritized Sweeping)可以解决上述问题。优先级采样通过设置优先级更新队列,根据值改变的幅度定义优先级: P ← ∣ R + γ max a Q ( S ′ , a ) − Q ( S , A ) ∣ P\leftarrow\left|R+\gamma\max_aQ\left(S^{\prime},a\right)-Q(S,A)\right| P← R+γamaxQ(S′,a)−Q(S,A)
算法伪代码:

Example1 Prioritized Sweepingon Mazes

- 横轴代表格子世界的大小
- 纵轴代表收敛到最优策略的更新次数
- 优先级采样收敛更快
局限性及改进
优先级采样在随机环境中利用期望更新(expected updates)的方法。但这样会浪费很多计算资源在一些低概率的状态转移(transitions)上,因此引入采样更新(sample updates)。
期望更新和采样更新

期望更新
- Q ( s , a ) ← ∑ s ′ , r p ^ ( s ′ , r ∣ s , a ) [ r + γ max a ′ Q ( s ′ , a ′ ) ] . Q(s,a)\leftarrow\sum_{s',r}\hat{p}(s',r|s,a)\Big[r+\gamma\max_{a'}Q(s',a')\Big]. Q(s,a)←s′,r∑p^(s′,r∣s,a)[r+γa′maxQ(s′,a′)].
- 需要知道准确的分布模型
- 需要更大的计算量
- 没有偏差更准确
采样更新
-
Q
(
s
,
a
)
←
Q
(
s
,
a
)
+
α
[
R
+
γ
max
a
′
Q
(
S
′
,
a
′
)
−
Q
(
s
,
a
)
]
,
Q(s,a)\leftarrow Q(s,a)+\alpha\Big[R+\gamma\max_{a'}Q(S',a')-Q(s,a)\Big],
Q(s,a)←Q(s,a)+α[R+γa′maxQ(S′,a′)−Q(s,a)], • 只需要采样模型
• 计算量需求更低
• 受到采样误差(sampling error)的影响
不同分支因子下的表现
设定
• 𝑏 个后续状态等可能
• 初始估计误差为1
• 下一个状态值假设估计正确

结果
• 分支因子越多,采样更新越接近期望更新
• 大的随机分支因子和状态数量较多的情况下, 采样更新更好
越复杂的环境越适合进行采样更新。
轨迹采样

- 动态规划
• 对整个状态空间进行遍历
• 没有侧重实际需要关注的状态上 - 在状态空间中按照特定分布采样
• 根据当前策略下所观测的分布进行采样

轨迹采样
- 状态转移和奖励由模型决定
- 动作由当前的策略决定
优点
• 不需要知道当前策略下状态的分布
• 计算量少,简单有效
缺点
• 不断重复更新已经被访问的状态

- 不同的分支因子下的表现
- 确定性环境中表现比较好
总结
- 优先级采样
• 收敛更快
• 随机环境使用期望更新,计算量大 - 期望更新和采样更新
• 期望更新计算量大但是没有偏差
• 采样更新计算量小但是存在采样偏差 - 轨迹采样
• 采样更新,计算量小
• 不断重复某些访问过的状态
实时动态规划
和传统动态规划的区别
• 实时的轨迹采样
• 只更新轨迹访问的状态值
优势
• 能够跳过策略无关的状态
• 在解决状态集合规模大的问题上具有优势
• 满足一定条件下可以以概率1收敛到最优策略
Example2 racetrack

决策时规划
背景规划(Background Planning)
• 规划是为了更新很多状态值供后续动作的选择
• 如动态规划,Dyna
决策时规划(Decision-time Planning)
• 规划只着眼于当前状态的动作选择
• 在不需要快速反应的应用中很有效,如棋类游戏
启发式搜索
-
访问到当前状态(根节点),对后续可能的情况进行树结构展开
-
叶节点代表估计的值函数
-
回溯到当前状态(根节点),方式类似于值函数的更新方式

-
决策时规划,着重于当前状态
-
贪婪策略在单步情况下的扩展
-
启发式搜索看多步规划下,当前状态的最优行动
-
搜索越深,计算量越大,得到的动作越接近最优
-
性能提升不是源于多步更新,而是源于专注当前状态的后续可能
Rollout算法
- 从当前状态进行模拟的蒙特卡洛估计
- 选取最高估计值的动作
- 在下一个状态重复上述步骤
特点
- 决策时规划,从当前状态进行𝑟𝑜𝑙𝑙𝑜𝑢𝑡
- 直接目的类似于策略迭代和改进,寻找更优的策略
- 表现取决于蒙特卡洛方法估值的准确性

蒙特卡洛树搜索
参考
[1] 伯禹AI
[2] https://www.deepmind.com/learning-resources/introduction-to-reinforcement-learning-with-david-silver
[3] 动手学强化学习
[4] Reinforcement Learning