文章目录
- 统计学习方法 感知机
- 模型定义
- 学习策略
- 学习算法
- 原始算法
- 对偶算法
- 学习算法的收敛性
统计学习方法 感知机
读李航的《统计机器学习》时,关于感知机的笔记。
感知机(perceptron)是一种二元分类的线性分类模型,属于判别模型,是 NN 和 SVM 的基础。
模型定义
感知机:输入空间
X
⊆
R
n
\mathcal{X}\subseteq \R^n
X⊆Rn ,输出空间是
Y
=
{
1
,
−
1
}
\mathcal{Y}=\set{1,\,-1}
Y={1,−1} ;输入
x
∈
X
x\in \mathcal{X}
x∈X 表示实例的特征向量,输出
y
∈
Y
y\in\mathcal{Y}
y∈Y 表示实例的类别。由输入空间到输出空间的如下函数:
f
(
x
)
=
sign
(
w
⋅
x
+
b
)
f(x)=\text{sign}(w \cdot x+b)
f(x)=sign(w⋅x+b)
称为感知机。其中
w
∈
R
n
w \in \R^n
w∈Rn 称为权重,
b
∈
R
b\in\R
b∈R 称为偏置。
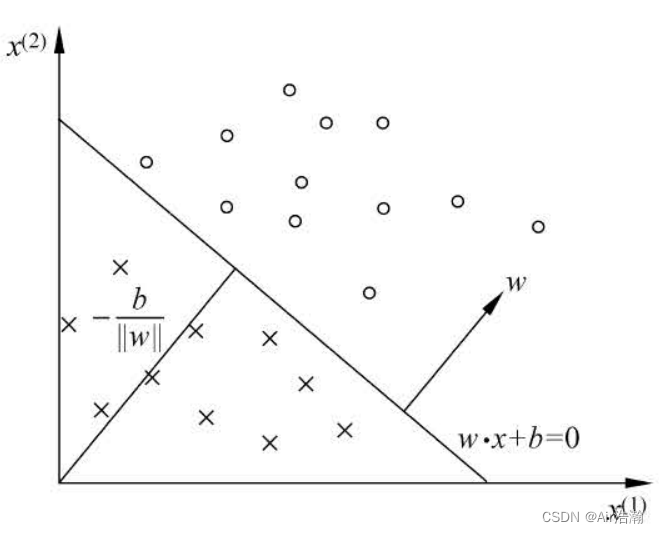
线性方程 w ⋅ x + b w \cdot x+b w⋅x+b 对应特征空间 R n \R^n Rn 中的一个超平面 S S S ,位于两边的点(特征向量)则被分为正、负两类:
学习策略
当训练数据是完全线性可分的,我们则可以找到一个超平面将正负类的数据完全分开。但数据不完全线性可分时,我们则要定义损失函数,找到一个感知机使得损失函数极小化。(但其实即使完全线性可分,也要定义损失函数,不然怎么学习 [乐.jpg])
很容易想到用分类错误的点的总数作为损失函数,但是这样对 w w w 和 b b b 就不是连续可导的了,不好优化。所以我们选择所有误分类点到超平面 S S S 的总距离作为损失函数。
空间中任意一点
x
0
∈
R
n
x_0\in \R^n
x0∈Rn 到超平面
S
S
S 的距离为:
dis
(
x
0
,
S
)
=
1
∣
∣
w
∣
∣
∣
w
⋅
x
0
+
b
∣
\text{dis}(x_0,S)=\frac{1}{||w||}|w\cdot x_0+b|
dis(x0,S)=∣∣w∣∣1∣w⋅x0+b∣
- ∣ ∣ w ∣ ∣ ||w|| ∣∣w∣∣ 是 w w w 的 L 2 L_2 L2 范数;
其次,对于误分类的数据
(
x
i
,
y
i
)
(x_i,y_i)
(xi,yi) 来说,
y
i
y_i
yi 与
f
(
x
)
f(x)
f(x) 符号相反,因此:
−
y
i
(
w
⋅
x
i
+
b
)
>
0
-y_i(w\cdot x_i+b)\gt 0
−yi(w⋅xi+b)>0
我们利用这个大于零的性质,可以将误分类点到超平面的距离表示为(因为
y
i
y_i
yi 只有可能是正负 1,所以乘上去也不会改变距离的大小):
dis
(
x
0
,
S
)
=
−
1
∣
∣
w
∣
∣
y
i
(
w
⋅
x
i
+
b
)
\text{dis}(x_0,S)=-\frac{1}{||w||}y_i(w\cdot x_i+b)
dis(x0,S)=−∣∣w∣∣1yi(w⋅xi+b)
因此,所有误分类点到超平面
S
S
S 的距离之和:
−
1
∣
∣
w
∣
∣
∑
x
i
∈
M
y
i
(
w
⋅
x
i
+
b
)
-\frac{1}{||w||}\sum_{x_i\in M} y_i(w\cdot x_i+b)
−∣∣w∣∣1xi∈M∑yi(w⋅xi+b)
- M M M 为被误分类点的集合;
这里不考虑
1
∣
∣
w
∣
∣
\frac{1}{||w||}
∣∣w∣∣1 ,即得到感知机的损失函数:
L
(
w
,
b
)
=
−
∑
x
i
∈
M
y
i
(
w
⋅
x
i
+
b
)
L(w,\,b)=-\sum_{x_i\in M} y_i(w\cdot x_i+b)
L(w,b)=−xi∈M∑yi(w⋅xi+b)
去掉
1
∣
∣
w
∣
∣
\frac{1}{||w||}
∣∣w∣∣1 对损失函数的优化至关重要,
y
i
(
w
⋅
x
i
+
b
)
y_i(w\cdot x_i+b)
yi(w⋅xi+b) 被称为样本点的函数间隔,在 SVM 中会涉及到。
学习算法
感知机学习算法的原始形式和对偶形式与第7支待向量机学习法的原始形式和偶形式相对应。
原始算法
给定一个训练数据集:
T
=
{
(
x
1
,
y
1
)
,
(
x
2
,
y
2
)
,
⋯
,
(
x
N
,
y
N
)
}
T=\{(x_1,\,y_1),\,(x_2,\,y_2),\,\cdots,\,(x_N,\,y_N)\}
T={(x1,y1),(x2,y2),⋯,(xN,yN)}
其中
x
i
∈
X
=
R
n
x_i\in\mathcal{X}=\bold{R}^n
xi∈X=Rn ,
y
i
∈
Y
=
{
−
1
,
1
}
y_i\in\mathcal{Y}=\{-1,\,1\}
yi∈Y={−1,1} ,
i
=
1
,
2
,
⋯
,
N
i=1,\,2,\,\cdots,\,N
i=1,2,⋯,N ,求参数
w
w
w 和
b
b
b ,使得以下损失函数极小化:
min
w
,
b
L
(
w
,
b
)
=
−
∑
x
i
∈
M
y
i
(
w
⋅
x
i
+
b
)
\min_{w,\,b}L(w,\,b)=-\sum_{x_i\in M}y_i(w\cdot x_i +b)
w,bminL(w,b)=−xi∈M∑yi(w⋅xi+b)
我们采用随机梯度下降法来学习参数
w
w
w 和
b
b
b ,梯度为:
∇
w
L
(
w
,
b
)
=
−
∑
x
i
∈
M
y
i
x
i
∇
b
L
(
w
,
b
)
=
−
∑
x
i
∈
M
y
i
\begin{align} \nabla_wL(w,\,b)=&\,-\sum\limits_{x_i\in M}y_ix_i \\ \nabla_bL(w,\,b)=&\,-\sum\limits_{x_i\in M}y_i \\ \end{align}
∇wL(w,b)=∇bL(w,b)=−xi∈M∑yixi−xi∈M∑yi
但学习的时候并不是一次使
M
M
M 中所有的误分类点都梯度下降,而是一次随机选取一个误分类点使其梯度下降。
算法:感知机学习算法的原始形式
输入:训练数据集 T T T ,学习率 η \eta η ( 0 < η ≤ 1 0 \lt\eta\leq 1 0<η≤1);
输出: w w w , b b b ,感知机模型 f ( x ) = sign ( w ⋅ x + b ) f(x)=\text{sign}(w\cdot x+b) f(x)=sign(w⋅x+b) ;
- 选取初值 w 0 w_0 w0 和 b 0 b_0 b0 ;
- 在训练集中选取数据 ( x i , y i ) (x_i,\,y_i) (xi,yi) ;
- 若 y i ( w ⋅ x i + b ) ≤ 0 y_i(w\cdot x_i+b) \leq 0 yi(w⋅xi+b)≤0 :
w ← w + η y i x i b ← b + η y i \begin{align} w \leftarrow&\, w+\eta y_ix_i \\ b \leftarrow&\, b+\eta y_i \end{align} w←b←w+ηyixib+ηyi
- 若当前训练集中仍有误分类点,则跳转至 2. ,否则结束;
对偶算法
我们前面对误分类点修改参数时的形式为:
w
←
w
+
η
y
i
x
i
b
←
b
+
η
y
i
\begin{align} w \leftarrow&\, w+\eta y_ix_i \\ b \leftarrow&\, b+\eta y_i \end{align}
w←b←w+ηyixib+ηyi
因此,我们可以认为模型参数是训练样本值的线性组合,即最后学习到的
w
w
w 和
b
b
b 可以表示为:
w
=
∑
i
=
1
N
α
i
y
i
x
i
b
=
∑
i
=
1
N
α
i
y
i
\begin{array}{c} w=\sum\limits_{i=1}^N \alpha_iy_ix_i \\ b=\sum\limits_{i=1}^{N}\alpha_iy_i \end{array}
w=i=1∑Nαiyixib=i=1∑Nαiyi
这里
α
i
≥
0
\alpha_i \geq 0
αi≥0 (
i
=
1
,
2
,
⋯
,
N
i=1,2,\cdots,N
i=1,2,⋯,N)。
算法:感知机学习算法的对偶形式
输入:训练数据集 T T T ,学习率 η \eta η ( 0 < η ≤ 1 0 \lt\eta\leq 1 0<η≤1);
输出: α \alpha α , b b b ,感知机模型 f ( x ) = sign ( ∑ j = 1 N α j y j x j ⋅ x + b ) f(x)=\text{sign}(\sum\limits_{j=1}^N \alpha_jy_jx_j\cdot x+b) f(x)=sign(j=1∑Nαjyjxj⋅x+b) ;
- 初始化: α ← 0 \alpha \leftarrow 0 α←0 , b ← 0 b \leftarrow 0 b←0 ;
- 在训练集中选取数据 ( x i , y i ) (x_i,\,y_i) (xi,yi) ;
- 若 y i ( ∑ j = 1 N α j y j x j ⋅ x + b ) ≤ 0 y_i(\sum\limits_{j=1}^N \alpha_jy_jx_j\cdot x+b) \leq 0 yi(j=1∑Nαjyjxj⋅x+b)≤0 ,
α i ← α i + η b ← b + η y i \begin{align} \alpha_i \leftarrow&\, \alpha_i+\eta \\ b \leftarrow&\, b+\eta y_i \end{align} αi←b←αi+ηb+ηyi
- 若当前训练集中仍有误分类点,则跳转至 2. ,否则结束;
为了方便,可以预先将训练集中的实例间的内积计算出来并以矩阵的形式存储,即 Gram 矩阵:
G
=
[
x
i
⋅
x
j
]
N
×
N
\bold{G}=[x_i \cdot x_j]_{N\times N}
G=[xi⋅xj]N×N
学习算法的收敛性
当数据集不可分时,显然上述算法会震荡。现在证明,对于线性可分数据集,感知机学习算法原始形式收敛,即经过有限次迭代就可以得到一个将数据集完全正确划分的分离超平面及感知机模型。
为了数学推导方面,我们将偏置
b
b
b 放入权重向量
w
w
w ,记作
w
^
=
[
w
t
,
b
]
T
\hat{w}=[w^t,\,b]^T
w^=[wt,b]T 。同样将输入向量进行增广,得到
x
^
=
[
x
T
,
1
]
T
\hat{x}=[x^T,\,1]^T
x^=[xT,1]T ,显然:
w
^
⋅
x
^
=
w
⋅
x
+
b
\hat{w}\cdot\hat{x}=w\cdot x+b
w^⋅x^=w⋅x+b
Th 2.1(Novikoff) 设训练数据集
T
T
T 是线性可分的,则:
- 存在满足条件 ∣ ∣ w ^ o p t ∣ ∣ = 1 ||\hat{w}_{opt}||=1 ∣∣w^opt∣∣=1 的超平面 w ^ o p t ⋅ x ^ = 0 \hat{w}_{opt}\cdot \hat{x}=0 w^opt⋅x^=0 将训练数据集完全正确分开,且存在 γ > 0 \gamma >0 γ>0 ,对所有 i = 1 , 2 , ⋯ , N i=1,\,2,\,\cdots,\,N i=1,2,⋯,N ,都有:
y i ( w ^ o p t ⋅ x ^ i ) = y i ( w o p t ⋅ x i + b o p t ) ≥ γ y_i(\hat{w}_{opt}\cdot \hat{x}_{i})=y_i(w_{opt}\cdot x_{i}+b_{opt})\geq \gamma yi(w^opt⋅x^i)=yi(wopt⋅xi+bopt)≥γ
- 令 R = max 1 ≤ i ≤ N ∣ ∣ x ^ i ∣ ∣ R=\max\limits_{1\leq i\leq N}||\hat{x}_{i}|| R=1≤i≤Nmax∣∣x^i∣∣ ,则感知机算法在训练数据集上的误分类次数 k k k 满足:
k ≤ ( R γ ) 2 k\leq \left(\frac{R}{\gamma}\right)^2 k≤(γR)2
证明:第一点较为简单。因为训练数据集线性可分,因此存在超平面
(
w
o
p
t
,
b
o
p
t
)
(w_{opt},\,b_{opt})
(wopt,bopt) 可将数据集完全正确分开。只要令:
γ
=
min
i
{
y
i
(
w
o
p
t
⋅
x
i
+
b
o
p
t
)
}
\gamma=\min_{i}\{ y_i(w_{opt}\cdot x_i+b_{opt}) \}
γ=imin{yi(wopt⋅xi+bopt)}
就有:
y
i
(
w
^
o
p
t
⋅
x
^
i
)
=
y
i
(
w
o
p
t
⋅
x
i
+
b
o
p
t
)
≥
γ
y_i(\hat{w}_{opt}\cdot \hat{x}_{i})=y_i(w_{opt}\cdot x_{i}+b_{opt})\geq \gamma
yi(w^opt⋅x^i)=yi(wopt⋅xi+bopt)≥γ
现在来看第二点,看起来还蛮神奇的。感知机算法从
w
^
0
=
0
\hat{w}_0=0
w^0=0 开始,记每一次迭代得到的参数为
w
^
k
\hat{w}_k
w^k 。第
k
k
k 个参数下,记
(
x
i
,
y
i
)
(x_i,\,y_i)
(xi,yi) 是被误分类的实例,则条件是:
y
i
(
w
^
k
−
1
⋅
x
^
i
)
=
y
i
(
w
k
−
1
⋅
x
i
+
b
k
−
1
)
≤
0
y_i(\hat{w}_{k-1}\cdot \hat{x}_i)=y_i(w_{k-1}\cdot x_i + b_{k-1})\leq 0
yi(w^k−1⋅x^i)=yi(wk−1⋅xi+bk−1)≤0
w
w
w 和
b
b
b 的更新是:
w
k
←
w
k
−
1
+
η
y
i
x
i
b
k
←
b
k
−
1
+
η
y
i
\begin{align} w_k \leftarrow&\, w_{k-1}+\eta y_ix_i \\ b_k \leftarrow&\, b_{k-1}+\eta y_i \end{align}
wk←bk←wk−1+ηyixibk−1+ηyi
即:
w
^
k
=
w
^
k
−
1
+
η
y
i
x
^
i
\hat{w}_k=\hat{w}_{k-1}+\eta y_i\hat{x}_i
w^k=w^k−1+ηyix^i
下面证明两个不等式:
① 由于我们是从
w
^
0
=
0
\hat{w}_0=0
w^0=0 开始的,因此迭代过程中的参数应当从小到大越来越接近
w
^
o
p
t
\hat{w}_{opt}
w^opt ,即
w
k
w_{k}
wk 与
w
o
p
t
w_{opt}
wopt 的内积越来越大:
$$
\begin{align}
\hat{w}k\cdot \hat{w}{opt} =&, \hat{w}{k-1}\cdot \hat{w}{opt}+\eta y_i\hat{w}{opt}\cdot\hat{x}i \
\geq &, \hat{w}{k-1}\cdot \hat{w}{opt}+\eta \gamma \
\geq &, \hat{w}{k-2}\cdot \hat{w}{opt}+2\eta \gamma \
\geq &, \cdots \
\geq &, k\eta \gamma
\end{align}
$$
- 第二个大于等于是因为,我们已经假设了 γ \gamma γ 是最小的 y i w ^ o p t x ^ i y_i\hat{w}_{opt}\hat{x}_i yiw^optx^i ,因此任意 i i i 都有 y i w ^ o p t x ^ i ≥ γ y_i\hat{w}_{opt}\hat{x}_i\geq \gamma yiw^optx^i≥γ ;
即:
w
^
k
⋅
w
^
o
p
t
≥
k
η
γ
\hat{w}_k\cdot \hat{w}_{opt}\geq k\eta \gamma
w^k⋅w^opt≥kηγ
② 由于我们是从
w
^
0
=
0
\hat{w}_0=0
w^0=0 开始的,因此迭代过程中的参数更新过大时,就会被后续的迭代给“拉”回来:
$$
\begin{align}
||\hat{w}k||2=&,||\hat{w}_{k-1}||2+2\eta y_i\hat{w}{k-1}\cdot \hat{x}i+\eta2||\hat{x}_i||2 \
\leq &, ||\hat{w}{k-1}||2+\eta||\hat{x}_i||2 \
\leq &, ||\hat{w}{k-1}||^2+\eta R^2 \
\leq &, ||\hat{w}{k-2}||^2+2\eta R^2 \
\leq &, \cdots \
\leq &, k\eta2R2
\end{align}
$$
- 第一个等号是因为:
∣ ∣ w ^ k ∣ ∣ 2 = w ^ k T w ^ k = ( w ^ k − 1 + η y i x ^ i ) T ( w ^ k − 1 + η y i x ^ i ) = ( w ^ k − 1 T + η y i x ^ i T ) ( w ^ k − 1 + η y i x ^ i ) = w ^ k − 1 T w ^ k − 1 + η y i ( w ^ k − 1 T x ^ i + x ^ i T w ^ k − 1 ) + η 2 y i 2 x ^ i T x ^ i = ∣ ∣ w ^ k − 1 ∣ ∣ 2 + 2 η y i w ^ k − 1 ⋅ x ^ i + η 2 ∣ ∣ x ^ i ∣ ∣ 2 (有 y i 2 = 1 ) \begin{align} ||\hat{w}_k||^2=&\,\hat{w}_k^T\hat{w}_k \\ =&\,(\hat{w}_{k-1}+\eta y_i\hat{x}_i)^T(\hat{w}_{k-1}+\eta y_i\hat{x}_i) \\ =&\,(\hat{w}_{k-1}^T+\eta y_i\hat{x}_i^T)(\hat{w}_{k-1}+\eta y_i\hat{x}_i) \\ =&\,\hat{w}_{k-1}^T\hat{w}_{k-1}+\eta y_i(\hat{w}_{k-1}^T\hat{x}_i+\hat{x}_i^T\hat{w}_{k-1})+\eta^2y_i^2\hat{x}_i^T\hat{x}_i \\ =&\,||\hat{w}_{k-1}||^2+2\eta y_i\hat{w}_{k-1}\cdot \hat{x}_i+\eta^2||\hat{x}_i||^2 \quad\text{(有$\,y_i^2=1$)} \end{align} ∣∣w^k∣∣2=====w^kTw^k(w^k−1+ηyix^i)T(w^k−1+ηyix^i)(w^k−1T+ηyix^iT)(w^k−1+ηyix^i)w^k−1Tw^k−1+ηyi(w^k−1Tx^i+x^iTw^k−1)+η2yi2x^iTx^i∣∣w^k−1∣∣2+2ηyiw^k−1⋅x^i+η2∣∣x^i∣∣2(有yi2=1)
- 第二个小于等于是因为我们假设 ( x i , y i ) (x_i,\,y_i) (xi,yi) 是被误分类的实例,因此 y i w ^ k − 1 ⋅ x ^ i < 0 y_i\hat{w}_{k-1}\cdot \hat{x}_i<0 yiw^k−1⋅x^i<0 ;
- 第三个小于等于是因为我们假设 R R R 是最大的特征向量的模,因此对于任意 i i i 都有 R ≥ ∣ ∣ x ^ i ∣ ∣ R \geq ||\hat{x}_i|| R≥∣∣x^i∣∣ ;
即:
∣
∣
w
^
k
∣
∣
2
≤
k
η
2
R
2
||\hat{w}_k||^2\leq k\eta^2R^2
∣∣w^k∣∣2≤kη2R2
综合不等式 ① 和 ② 得:
k
η
γ
≤
w
^
k
⋅
w
^
o
p
t
≤
∣
∣
w
^
k
∣
∣
∣
∣
w
^
o
p
t
∣
∣
≤
k
η
R
⇒
k
2
γ
2
≤
k
R
2
\begin{array}{c} k\eta \gamma \leq \hat{w}_k\cdot \hat{w}_{opt} \leq ||\hat{w}_{k}||\,||\hat{w}_{opt}|| \leq \sqrt{k}\eta R \\ \Rightarrow k^2\gamma^2 \leq kR^2 \end{array}
kηγ≤w^k⋅w^opt≤∣∣w^k∣∣∣∣w^opt∣∣≤kηR⇒k2γ2≤kR2
- 第二个小于等于是柯西不等式, x ⋅ y = ∣ ∣ x ∣ ∣ ∣ ∣ y ∣ ∣ cos θ ≤ ∣ ∣ x ∣ ∣ ∣ ∣ y ∣ ∣ x\cdot y=||x||\,||y||\,\cos\theta\leq ||x||\,||y|| x⋅y=∣∣x∣∣∣∣y∣∣cosθ≤∣∣x∣∣∣∣y∣∣ ,其中 θ \theta θ 是两个向量的夹角。
于是:
k
≤
(
R
γ
)
2
k\leq \left(\frac{R}{\gamma}\right)^2
k≤(γR)2
该定理表明,误分类次数
k
k
k 是有上界的,即训练集线性可分时,感知机学习算法原始形式迭代是收敛的。








![[ Windows ] ping IP + Port 测试 ip 和 端口是否通畅](https://img-blog.csdnimg.cn/811ed46021bb49a89b5a4ab225124f20.png)