目录
一、spi简介
二、SPI特性
三、spi四种工作方式
四、实现代码
1.选择开发板
2.选择SPI
3.设置硬件片选使能和通讯方式,其他根据需要选择
4. 生成代码
一、spi简介
SPI 是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。是Motorola首先在其MC68HCXX系列处理器上定义的。SPI接口主要应用在EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议
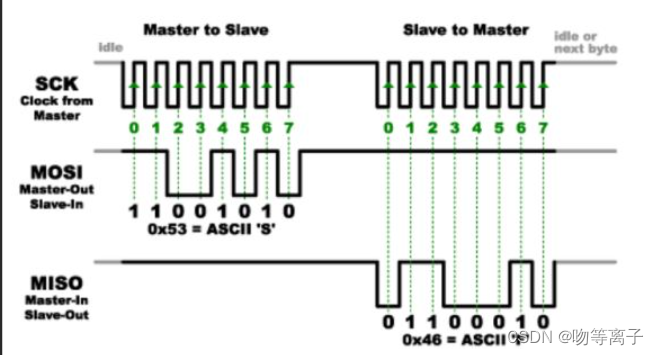
SPI是一个同步的数据总线,也就是说它是用单独的数据线和一个单独的时钟信号来保证发送端和接收端的完美同步。
时钟是一个振荡信号,它告诉接收端在确切的时机对数据线上的信号进行采样。
产生时钟的一侧称为主机,另一侧称为从机。总是只有一个主机(一般来说可以是微控制器/MCU),但是可以有多个从机(后面详细介绍);
数据的采集时机可能是时钟信号的上升沿(从低到高)或下降沿(从高到低)
二、SPI特性
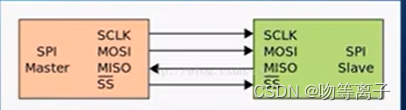
SPI总线包括4条逻辑线,定义如下:
- MISO: 主机输入,从机输出(数据来自从机)Master input slave output;
- MOSI: 主机输出,从机输入(数据来自主机)Master output slave input;
- SCLK :串行时钟信号,由主机产生发送给从机 Serial Clock ;
- SS: 片选,由主机发送,以控制与哪个从机通信,通常是低电平有效信号 Slave Select。
主机的sck MOSI MISO分别逐次连接从机,每个片选连接一个从机,每个从机都需要一条单独的SS线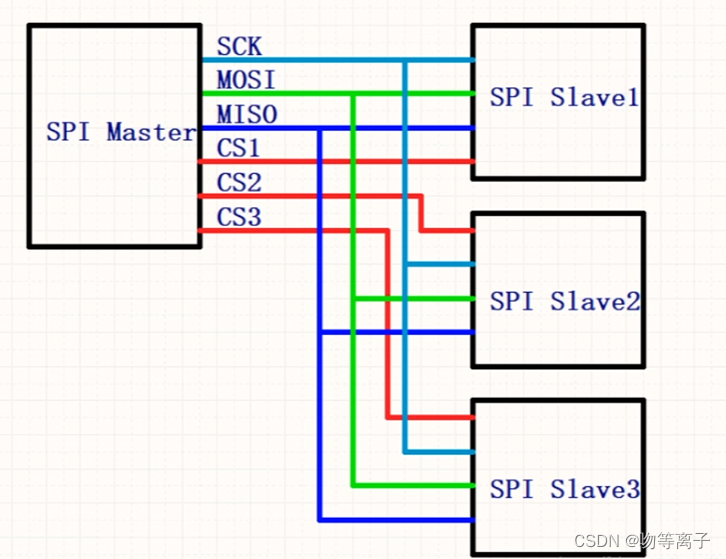
三、spi四种工作方式
SPI总线有四种工作方式(SP0, SP1, SP2, SP3),其中使用的最为广泛的是SPI0和SPI3方式。
SPI模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。如果CPOL=0,串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。如果 CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。 SPI主模块和与之通信的外设音时钟相位和极性应该一致。
SPI接口有四种不同的数据传输时序,取决于CPOL和CPHL这两位的组合。图1中表现了这四种时序,时序与CPOL、CPHL的关系也可以从图中看出。
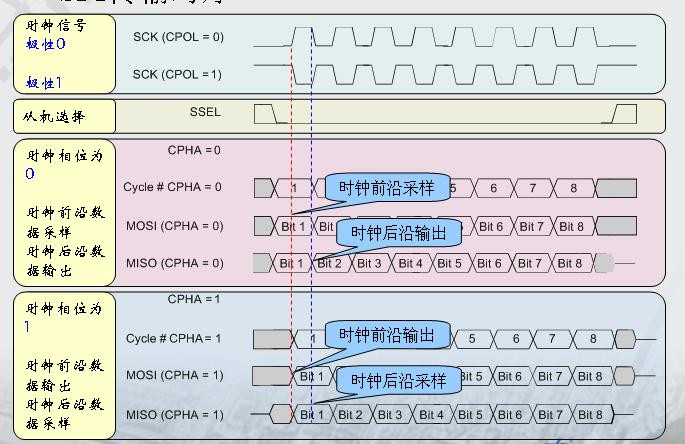
CPOL是用来决定SCK时钟信号空闲时的电平,CPOL=0,空闲电平为低电平,CPOL=1时,
空闲电平为高电平。CPHA是用来决定采样时刻的,CPHA=0,在每个周期的第一个时钟沿采样,
CPHA=1,在每个周期的第二个时钟沿采样。
四、实现代码
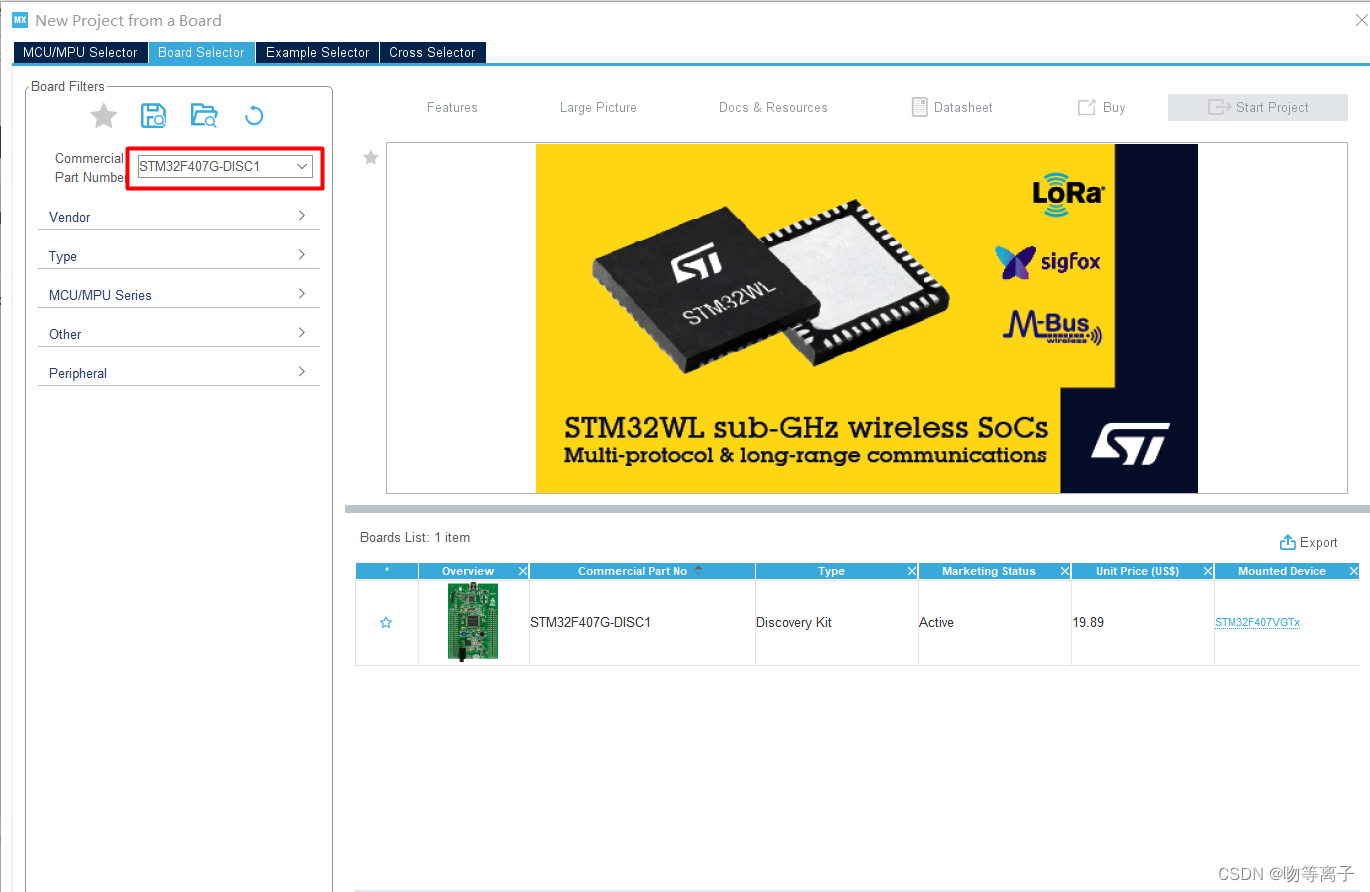
1.选择开发板

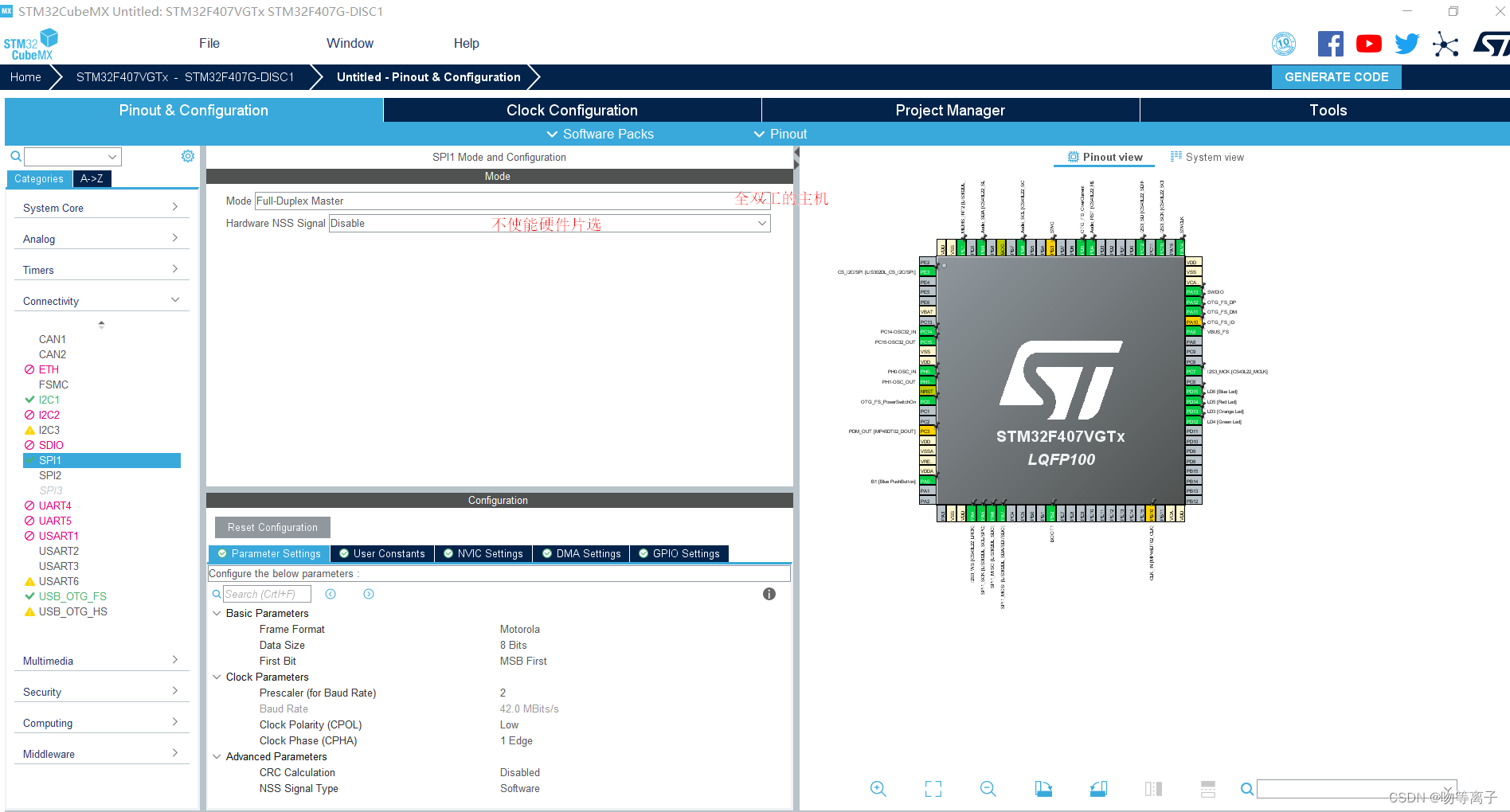
2.选择SPI

3.设置硬件片选使能和通讯方式,其他根据需要选择
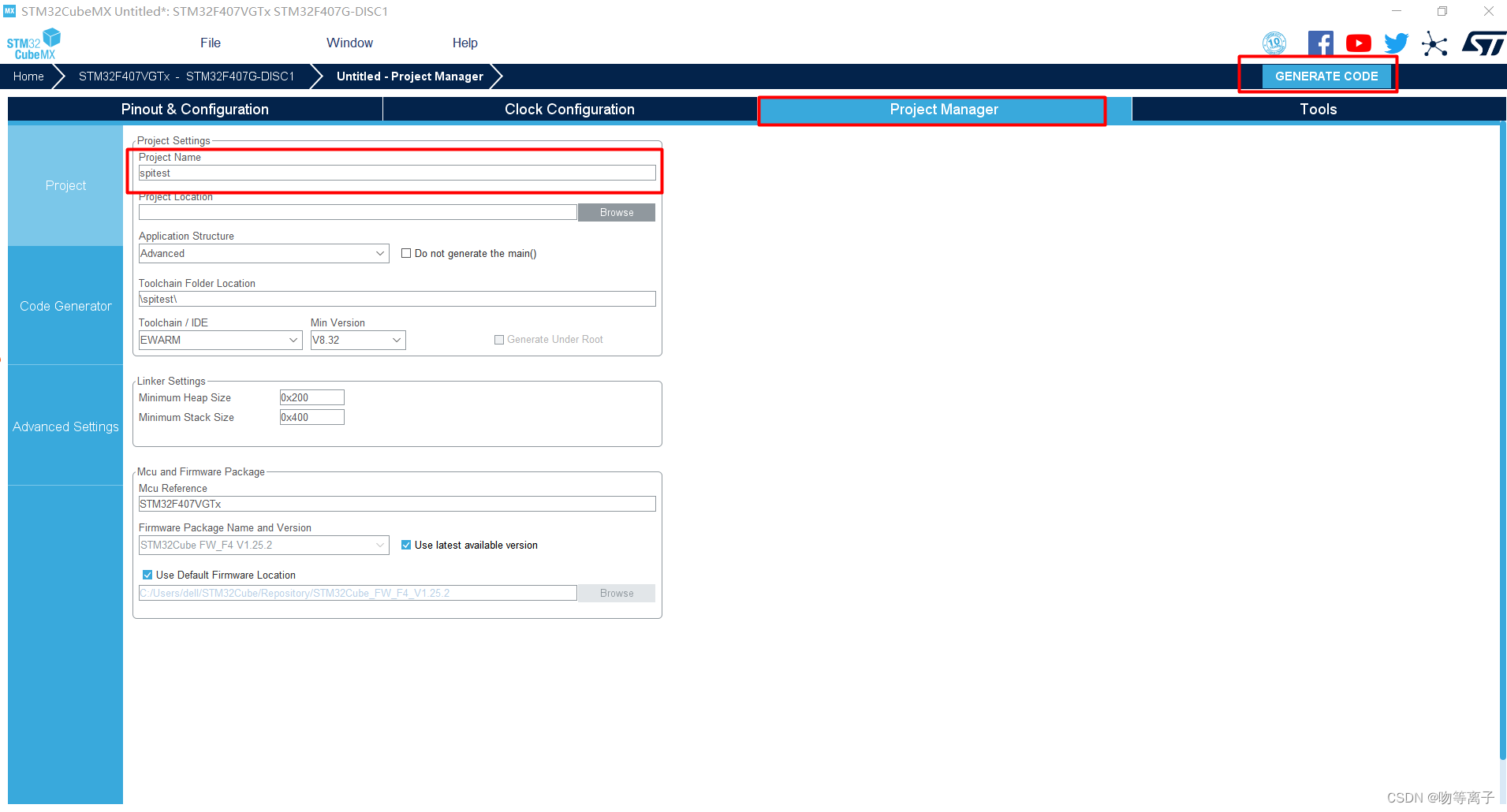
4. 生成代码
static void MX_SPI1_Init(void)
{
hspi1.Instance = SPI1;
hspi1.Init.Mode = SPI_MODE_MASTER; //主机模式
hspi1.Init.Direction = SPI_DIRECTION_2LINES; //全双工
hspi1.Init.DataSize = SPI_DATASIZE_8BIT; //数据位为8位
hspi1.Init.CLKPolarity = SPI_POLARITY_LOW; //CPOL=0
hspi1.Init.CLKPhase = SPI_PHASE_1EDGE; //CPHA为数据线的第一个变化沿
hspi1.Init.NSS = SPI_NSS_SOFT; //软件控制NSS
hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_2;//2分频,32M/2=16MHz
hspi1.Init.FirstBit = SPI_FIRSTBIT_MSB; //最高位先发送
hspi1.Init.TIMode = SPI_TIMODE_DISABLE; //TIMODE模式关闭
hspi1.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;//CRC关闭
hspi1.Init.CRCPolynomial = 10; //默认值,无效
if (HAL_SPI_Init(&hspi1) != HAL_OK) //初始化
{
_Error_Handler(__FILE__, __LINE__);
}
}
//发送数据
HAL_StatusTypeDef
HAL_SPI_Transmit(SPI_HandleTypeDef *hspi,
uint8_t *pData,
uint16_t Size,
uint32_t Timeout);
//接收数据
HAL_StatusTypeDef
HAL_SPI_Receive(SPI_HandleTypeDef *hspi,
uint8_t *pData,
uint16_t Size,
uint32_t Timeout);