文章目录
- 2021
- GVINS: Tightly Coupled GNSS-Visual-Inertial Fusion for Smooth and Consistent State Estimation
- 2022
- IC-GVINS: A Robust, Real-Time, INS-Centric GNSS-Visual-Inertial Navigation System
- 2023
- LE-VINS: A Robust Solid-State-LiDAR-Enhanced Visual-Inertial Navigation System for Low-Speed Robots
2021
GVINS: Tightly Coupled GNSS-Visual-Inertial Fusion for Smooth and Consistent State Estimation
code: https://github.com/HKUST-Aerial-Robotics/GVINS
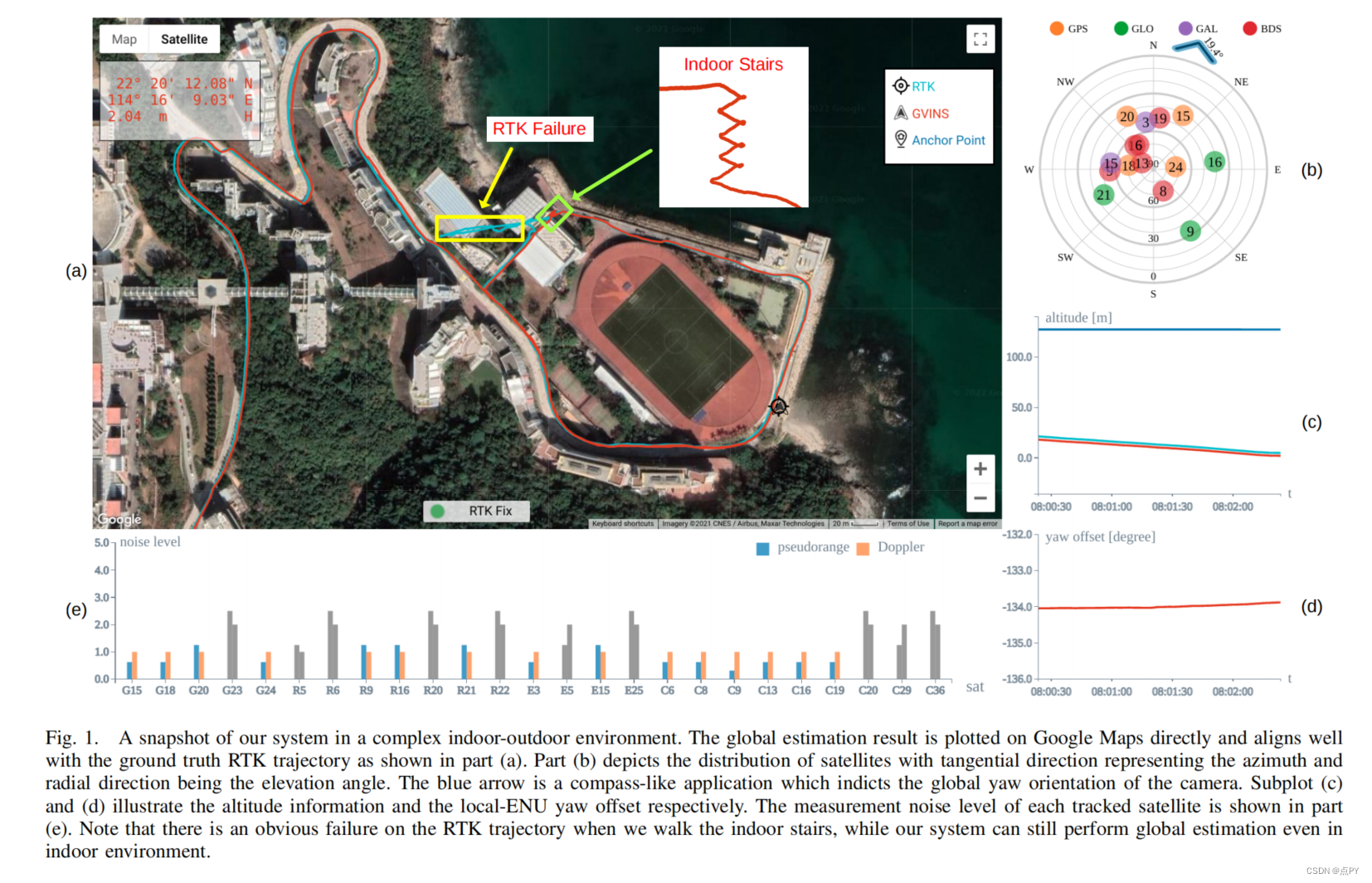
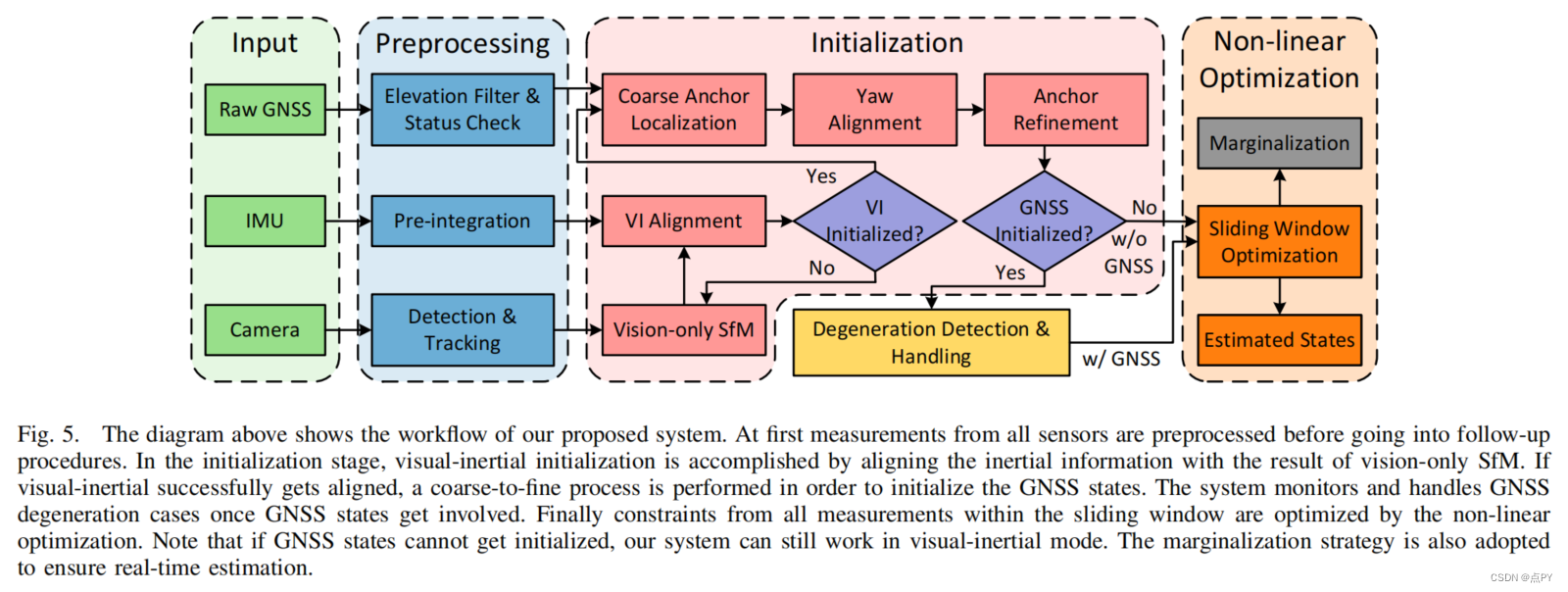
摘要: 众所周知,视觉惯性测程法(VIO)会发生漂移,特别是在长期运行中。在本文中,我们提出了一个基于非线性优化的GVINS系统GVINS,该系统将GNSS原始测量与视觉和惯性信息紧密融合,用于实时和无漂移状态估计。我们的系统旨在在复杂的室内外环境下提供准确的全球6自由度估计,其中GNSS信号可能是间歇性的,甚至完全不可用。为了将全局测量值与局部状态连接起来,提出了一种粗到细的初始化方法,以有效地在线校准转换,并从很短的测量窗口初始化GNSS状态。GNSS代码伪橙色和多普勒频移测量,以及视觉和惯性信息,然后被建模并用于约束一个因子图框架中的系统状态。对于复杂和不GNSS友好的区域,讨论并仔细处理退化情况,以确保鲁棒性。由于紧密耦合的多传感器方法和系统设计,我们的系统充分利用了三种类型的传感器的优点,并能够无缝地应对室内和室外环境之间的过渡,其中卫星丢失和重新获得。我们通过仿真和真实实验对所提出的系统进行了广泛的评估,结果表明,我们的系统大大消除了VIO的漂移,尽管GNSS测量有噪声,但仍保持了局部精度。具有挑战性的室内外和城市驾驶实验验证了GVINS在复杂环境中的可用性和鲁棒性。此外,实验还表明,我们的系统甚至可以从一颗卫星上获得收益,而传统的GNSS算法至少需要四个卫星。
2022
IC-GVINS: A Robust, Real-Time, INS-Centric GNSS-Visual-Inertial Navigation System
code: https://github.com/i2Nav-WHU/IC-GVINS
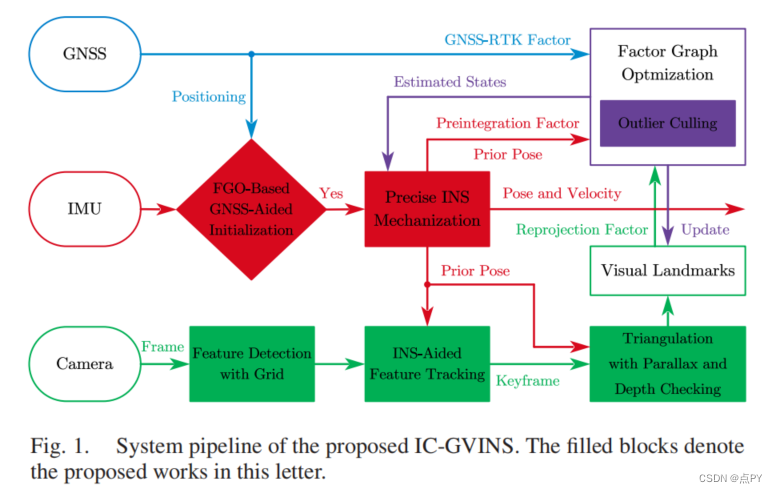
摘要:视觉导航系统容易受到复杂环境的影响,而惯性导航系统(INS)不受外部因素的影响。因此,我们提出了IC-GVINS,一个强大的、实时的、以INS为中心的全球导航卫星系统(GNSS)-视觉惯性导航系统,以充分利用INS的优势。惯性测量系统对地球自转进行了补偿,以提高高级惯性测量单元(IMUs)的精度。为了提高系统在高动态条件下的鲁棒性,我们采用了精确的INS信息来辅助特征跟踪和地标三角测量。通过GNSS辅助初始化,IMU、可视化和GNSS测量在因子图优化框架内的统一世界框架中紧密融合。在公共车辆和私人机器人数据集中进行了专门的实验,以评估所提出的方法。结果表明,IC-GVINS在复杂环境中表现出优越的鲁棒性和准确性。与最先进的方法相比,所提出的以ins为中心的架构的方法产生了更好的鲁棒性和准确性。
2023
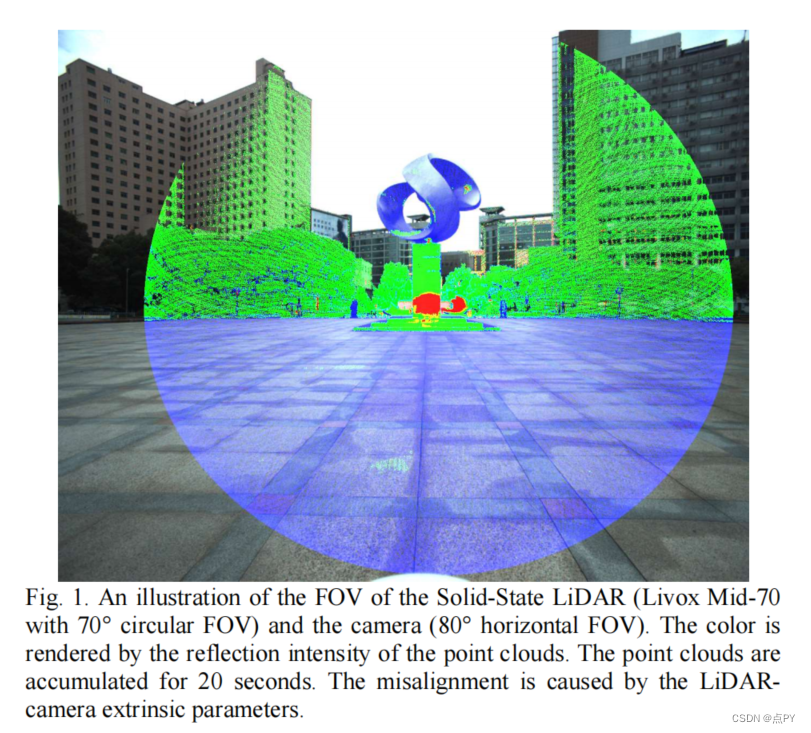
LE-VINS: A Robust Solid-State-LiDAR-Enhanced Visual-Inertial Navigation System for Low-Speed Robots
摘要:在视觉惯性导航系统(VINS)中,对视觉地标的精确和长距离深度估计具有挑战性。在具有光照变化、移动物体或弱纹理的视觉退化场景中,深度估计可能更加困难,导致鲁棒性和准确性较差。对于低速机器人导航,我们提出了一种固态-lidar增强型VINS(LE-VINS),以提高系统在具有挑战性的环境下的鲁棒性和准确性。来自固态激光雷达的点云被投影到具有惯性导航系统(INS)姿态的视觉关键帧上,以进行深度关联,同时补偿运动失真。提出了一种具有有效平面检查算法的鲁棒深度关联方法来估计地标深度。根据估计的深度,我们提出了一个激光雷达深度因子来构建因子图优化(FGO)中的视觉地标的精确深度测量。视觉特征、激光雷达深度和IMU测量值在FGO框架内紧密融合,以实现最大-a-后验估计。在大规模挑战环境中对低速机器人进行了现场测试。结果表明,与原始VINS相比,所提的左旋叶素显著提高了鲁棒性和准确性。此外,LE-VINS比最先进的激光雷达-视觉-惯性导航系统具有更优越的精度。LE-VINS的性能也优于现有的激光雷达增强方法,得益于鲁棒的深度关联算法和有效的激光雷达深度因子。