Air001 TIM1高级定时器单脉冲输出模式使用
✨本例程基于合宙官方提供的标准库以及Demo工程作为验证参考。 📍官方提供的SDK包资源:https://gitee.com/openLuat/luatos-soc-air001 🌿想了解STM32高级定时器单脉冲输出模式了解可以参考阅读:https://shequ.stmicroelectronics.cn/thread-622823-1-1.html 🚩TIM1高级定时器基本功能:
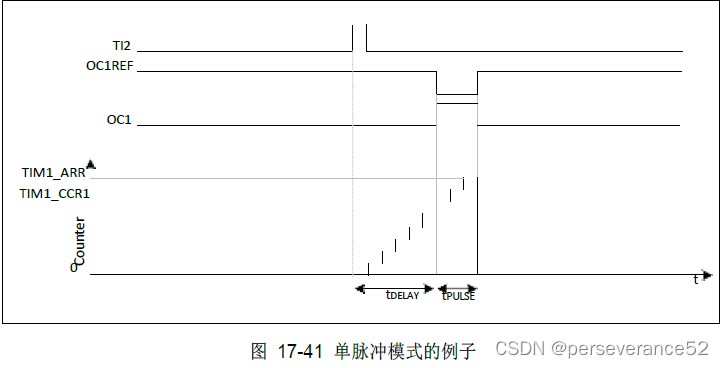
🌿可以通过从模式控制器启动计数器,在输出比较模式或者 PWM 模式下产生波形。设置 TIMx_CR1 寄存器的 OPM 位将选择单脉冲模式,这样可以让计数器自动的在产生下一个更新事件 UEV 时停止。 🔖用户手册给出的例子说明:
例如,当需要在从 TI2 输入脚上检测到一个上升沿开始,延迟 tDELAY 之后,在 OC1 上产生一个长度为tPULSE 的正脉冲。
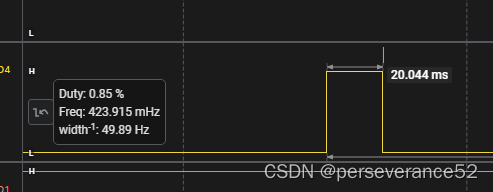
⚡需要注意的是,通道2的检测信号频率,不能超出输出通道1的频率,否则通道1输出的信号会被截断。根据本例程配置,通道2的信号间隔需要大于100ms。 🔰如需响应更高频率信号的接收和输出,可以将分频系数改小。(TimHandle.Init.Prescaler )
🌿TIM1定时器通道1:TIM1_CH1 ------> GPIO_AF13_TIM1----->PA3 🌿TIM1定时器通道2: TIM1_CH2 ------> GPIO_AF1_TIM1----->PB3 🖍对应通道引脚配置初始化: void TIM1_GPIO_Configuration ( void )
{
GPIO_InitTypeDef GPIO_InitStruct;
__HAL_RCC_GPIOA_CLK_ENABLE ( ) ;
__HAL_RCC_GPIOB_CLK_ENABLE ( ) ;
GPIO_InitStruct. Pin = GPIO_PIN_3;
GPIO_InitStruct. Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct. Pull = GPIO_PULLUP;
GPIO_InitStruct. Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct. Alternate = GPIO_AF13_TIM1;
HAL_GPIO_Init ( GPIOA, & GPIO_InitStruct) ;
GPIO_InitStruct. Pin = GPIO_PIN_3;
GPIO_InitStruct. Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct. Pull = GPIO_PULLUP;
GPIO_InitStruct. Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct. Alternate = GPIO_AF1_TIM1;
HAL_GPIO_Init ( GPIOB, & GPIO_InitStruct) ;
}
TIM_HandleTypeDef TimHandle;
TIM_OnePulse_InitTypeDef sConfig;
TimHandle. Instance = TIM1;
TimHandle. Init. Period = 1000 ;
TimHandle. Init. Prescaler = 800 - 1 ;
TimHandle. Init. ClockDivision = TIM_CLOCKDIVISION_DIV1;
TimHandle. Init. CounterMode = TIM_COUNTERMODE_UP;
TimHandle. Init. RepetitionCounter = 1 - 1 ;
TimHandle. Init. AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if ( HAL_TIM_OnePulse_Init ( & TimHandle, TIM_OPMODE_SINGLE) != HAL_OK)
{
Error_Handler ( ) ;
}
sConfig. OCMode = TIM_OCMODE_PWM1;
sConfig. OCPolarity = TIM_OCPOLARITY_LOW;
sConfig. Pulse = 200 ;
sConfig. ICPolarity = TIM_ICPOLARITY_RISING;
sConfig. ICSelection = TIM_ICSELECTION_DIRECTTI;
sConfig. ICFilter = 0 ;
sConfig. OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfig. OCIdleState = TIM_OCIDLESTATE_RESET;
sConfig. OCNIdleState = TIM_OCNIDLESTATE_RESET;
if ( HAL_TIM_OnePulse_ConfigChannel ( & TimHandle, & sConfig, TIM_CHANNEL_1, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler ( ) ;
}
if ( HAL_TIM_OnePulse_Start ( & TimHandle, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler ( ) ;
}
TIM_HandleTypeDef TimHandle;
TIM_OnePulse_InitTypeDef sConfig;
TimHandle. Instance = TIM1;
TimHandle. Init. Period = 1000 ;
TimHandle. Init. Prescaler = 800 - 1 ;
TimHandle. Init. ClockDivision = TIM_CLOCKDIVISION_DIV1;
TimHandle. Init. CounterMode = TIM_COUNTERMODE_UP;
TimHandle. Init. RepetitionCounter = 1 - 1 ;
TimHandle. Init. AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if ( HAL_TIM_OnePulse_Init ( & TimHandle, TIM_OPMODE_SINGLE) != HAL_OK)
{
Error_Handler ( ) ;
}
sConfig. OCMode = TIM_OCMODE_PWM2;
sConfig. OCPolarity = TIM_OCPOLARITY_HIGH;
sConfig. Pulse = 200 ;
sConfig. ICPolarity = TIM_ICPOLARITY_RISING;
sConfig. ICSelection = TIM_ICSELECTION_DIRECTTI;
sConfig. ICFilter = 0 ;
sConfig. OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfig. OCIdleState = TIM_OCIDLESTATE_RESET;
sConfig. OCNIdleState = TIM_OCNIDLESTATE_RESET;
if ( HAL_TIM_OnePulse_ConfigChannel ( & TimHandle, & sConfig, TIM_CHANNEL_1, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler ( ) ;
}
if ( HAL_TIM_OnePulse_Start ( & TimHandle, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler ( ) ;
}
链接:https:
提取码:beda