文章目录
前言
1 设置参数
2 参数说明
前言
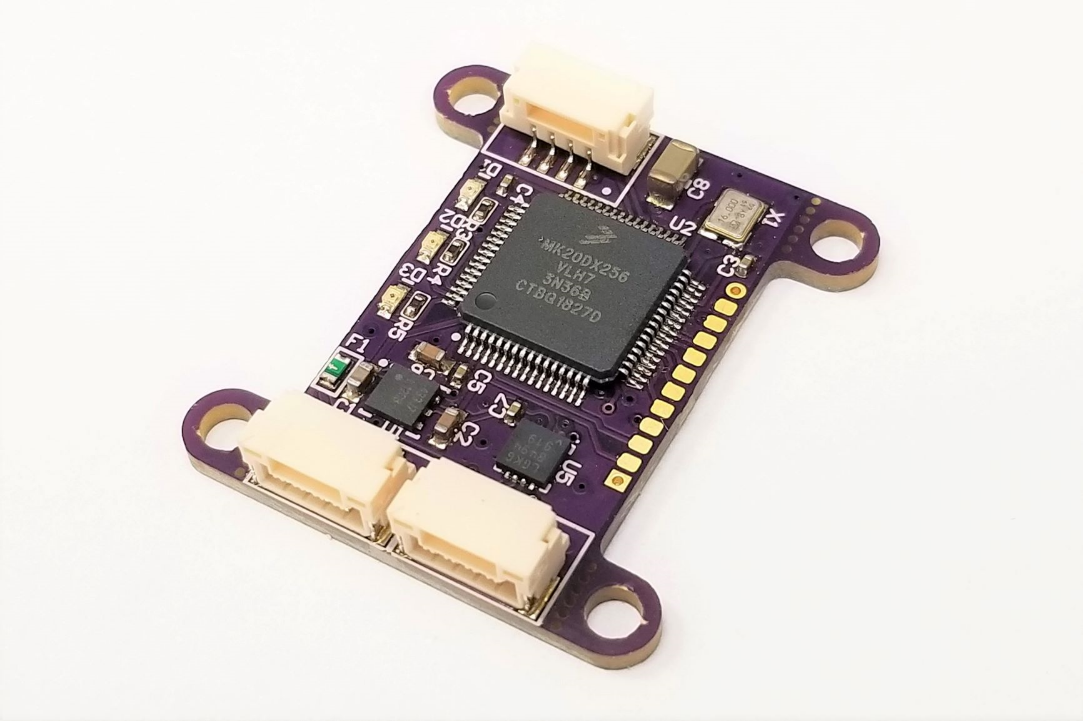
Avionics Anonymous DroneCAN 激光雷达接口是一个微型接口(Avionics Anonymous DroneCAN LIDAR Interface),适用于几种常见的激光测距仪(several common laser rangefinders),可通过 DroneCAN 连接到 Pixhawk 和其他类似的自动驾驶仪。与 I2C 相比,它能在更远的距离上为外设提供高可靠性连接。
1 设置参数
应在自动驾驶仪上设置以下参数(然后重新启动自动驾驶仪):
- CAN_P1_DRIVER = 1(启用第一个 CAN 端口);
- RNGFNDx_TYPE = 24;
- RNGFNDx_MIN 根据所连接激光器的数据表确定;
- RNGFNDx_MAX 根据所连接激光器的数据表确定。
如果设备不工作,请按照 CAN 总线设置页面(CAN Bus Setup)中启用 CANBUS 的说明,然后按照 DroneCAN 设置步骤(DroneCAN Setup),将 RNGFNDx_TYPE 参数设置为 24。
!Note
如果所连接的测距仪不是 Lightware SF11/c,则必须使用上述 SLCAN 说明将该设备的 DroneCAN 内部 rangefinder_hw 参数设置为适当的测距仪类型。
这里是制造商的产品页面(manufacturer’s product page is here),提供有关该设备的一般信息。
2 参数说明
1、CAN_P1_DRIVER:与物理 CAN 接口一起使用的虚拟驱动程序索引
注意:更改后需要重新启动。
启用该选项可使用 CAN 总线。
| Values | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
|
2、RNGFND1_TYPE:测距仪类型
连接测距仪的类型。
| Values | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
3、RNGFND1_MIN_CM:测距仪最小距离
测距仪能可靠读取的最小距离(厘米)。
| Increment | Units |
|---|---|
| 1 | centimeters |
4、RNGFND1_MAX_CM:测距仪最大距离
测距仪能可靠读取的最大距离(厘米)。
| Increment | Units |
|---|---|
| 1 | centimeters |