文章目录
- 空间配置器
- 一级空间配置器
- 二级空间配置器
- 1. 内存池
- 2. SGI-STL中二级空间配置器设计 - - 哈希桶
- 3. 二级空间配置器的空间申请
- 空间配置器的默认选择
- 空间配置器的在封装:添加了数据类型大小
- 空间配置器对象的构造与析构
- 容器中的 allocator
空间配置器
提到空间配置,难免让人联想到 malloc 系列函数。malloc 可以设定用户自己需要的类型为其开辟空间,而空间配置器是专门为 STL 容器进行空间配置的。
空间配置器 allocator:为各个容器进行高效的空间管理 - - 空间的申请与回收。
如果我们用 new 自己设计空间管理,容易因为 频繁向系统申请小块内存而造成内存碎片、影响程序运行效率。而 SGI-STL以128作为小块内存与大块内存的分界线,将空间配置器其分为两级结构,一级空间配置器处理大块内存,二级空间配置器处理小块内存。
一级空间配置器
一级空间配置器原理非常简单,直接对malloc与free进行了封装,并增加了C++中 set_new_handle 思想。
template <int inst>
class __malloc_alloc_template
{
private:
static void *oom_malloc(size_t);
public:
// 对malloc的封装
static void * allocate(size_t n)
{
// 申请空间成功,直接返回,失败交由oom_malloc处理
void *result = malloc(n);
if (0 == result)
result = oom_malloc(n);
return result;
}
// 对free的封装
static void deallocate(void *p, size_t /* n */)
{ free(p);}
// 模拟set_new_handle
// 该函数的参数为函数指针,返回值类型也为函数指针
// void (* set_malloc_handler( void (*f)() ) )()
static void (* set_malloc_handler(void (*f)()))()
{
void (* old)() = __malloc_alloc_oom_handler;
__malloc_alloc_oom_handler = f;
return(old);
}
};
// malloc申请空间失败时代用该函数
template <int inst>
void * __malloc_alloc_template<inst>::oom_malloc(size_t n)
{
void (* my_malloc_handler)();
void *result;
for (;;)
{
// 检测用户是否设置空间不足应对措施,如果没有设置,抛异常,模式new的方式
my_malloc_handler = __malloc_alloc_oom_handler;
if (0 == my_malloc_handler)
{
__THROW_BAD_ALLOC;
}
// 如果设置,执行用户提供的空间不足应对措施
(*my_malloc_handler)();
// 继续申请空间,可能就会申请成功
result = malloc(n);
if (result)
return(result);
}
}
typedef __malloc_alloc_template<0> malloc_alloc;
二级空间配置器
二级空间配置器专门负责处理小于 128 字节的小块内存。SGI-STL 采用了 内存池 的技术来提高申请空间的速度以及减少额外空间的浪费,采用 哈希桶 的方式来提高用户获取空间的速度与高效管理。
1. 内存池
内存池就是:先申请一块比较大的内存块已做备用,当需要内存时,直接到内存池中去去,当池中空间不够时,再向内存中去取,当用户不用时,直接还回内存池即可。避免了频繁向系统申请小块内存所造成的效率低、内存碎片以及额外浪费的问题。
2. SGI-STL中二级空间配置器设计 - - 哈希桶
内存池的空间是以哈希桶结构管理的,这里的哈希桶是以 8 字节 的 整数倍 进行设置的, 如果用户所需内存块不是8的整数倍,向上对齐到8的整数倍。原因有两个:
-
因为用户申请的空间基本都是4的整数倍,其他大小的空间几乎很少用到。
-
每个桶下面悬挂一个个的未被分配的空间,他们的首部 4/8 个字节 储存的都是下一块空间的地址(或者 nullptr),而 64 位空间下的地址就是 8 字节。
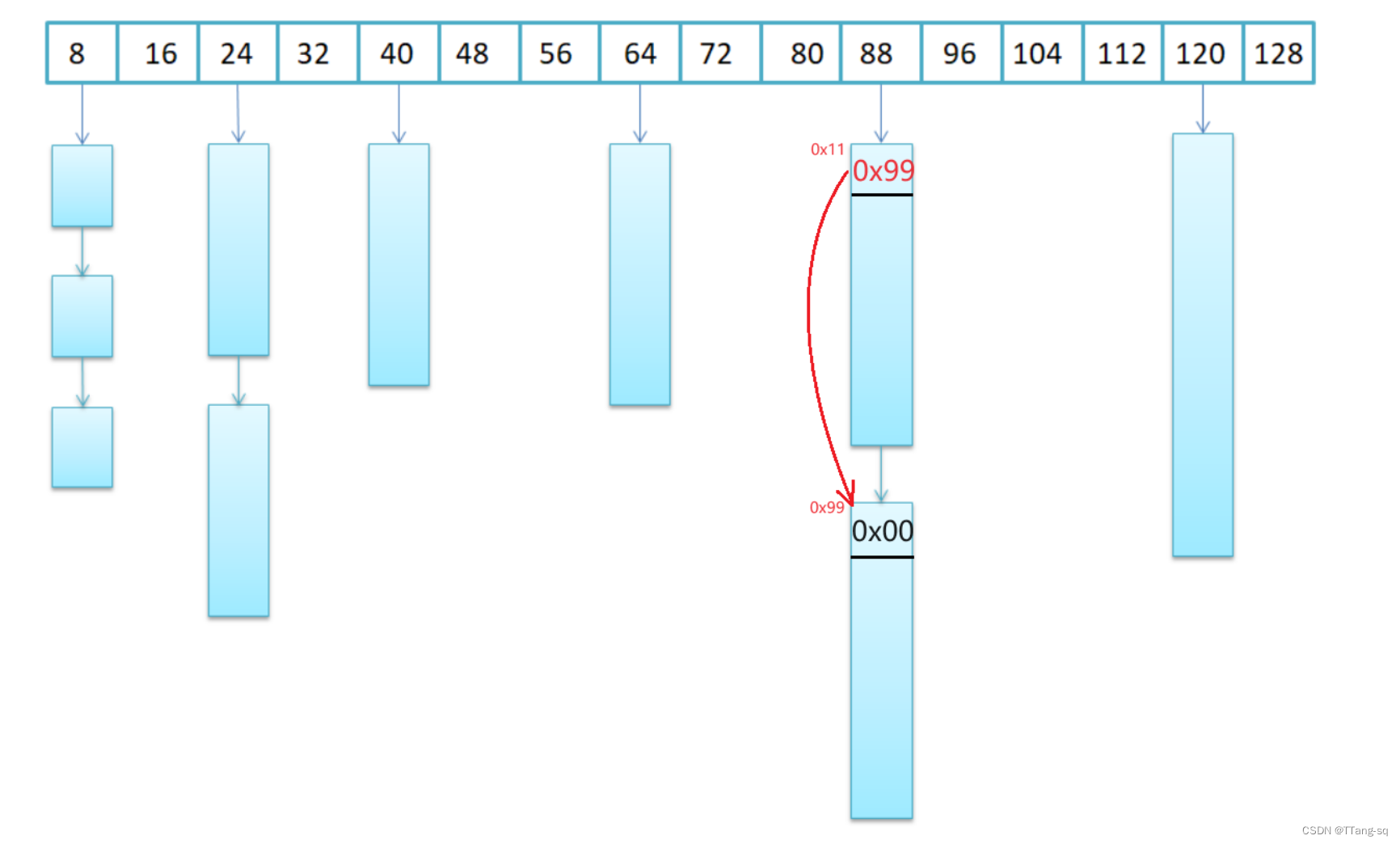
小于 128 的小块内存申请和释放,在哈希桶中以头删和头插的方式实现。
3. 二级空间配置器的空间申请
申请空间:
- 申请空间大于 128 一级 allocator 进行分配
- 小于 128 去找相应大小的桶,如果下面有悬挂内存,就把第一个给用户
- 如果桶下没有内存,去找内存池索要(见下),并将第一个内存块返回给用户

// 函数功能:向空间配置器索要空间
// 参数n: 用户所需空间字节数
// 返回值:返回空间的首地址
static void * allocate(size_t n)
{
obj * __VOLATILE * my_free_list;
obj * __RESTRICT result;
// 检测用户所需空间释放超过128(即是否为小块内存)
if (n > (size_t) __MAX_BYTES)
{
// 不是小块内存交由一级空间配置器处理
return (malloc_alloc::allocate(n));
}
// 根据用户所需字节找到对应的桶号
my_free_list = free_list + FREELIST_INDEX(n);
result = *my_free_list;
// 如果该桶中没有内存块时,向该桶中补充空间
if (result == 0)
{
// 将n向上对齐到8的整数被,保证向桶中补充内存块时,内存块一定是8的整数倍
void *r = refill(ROUND_UP(n));
return r;
}
// 维护桶中剩余内存块的链式关系
*my_free_list = result -> free_list_link;
return (result);
};
填充内存块:
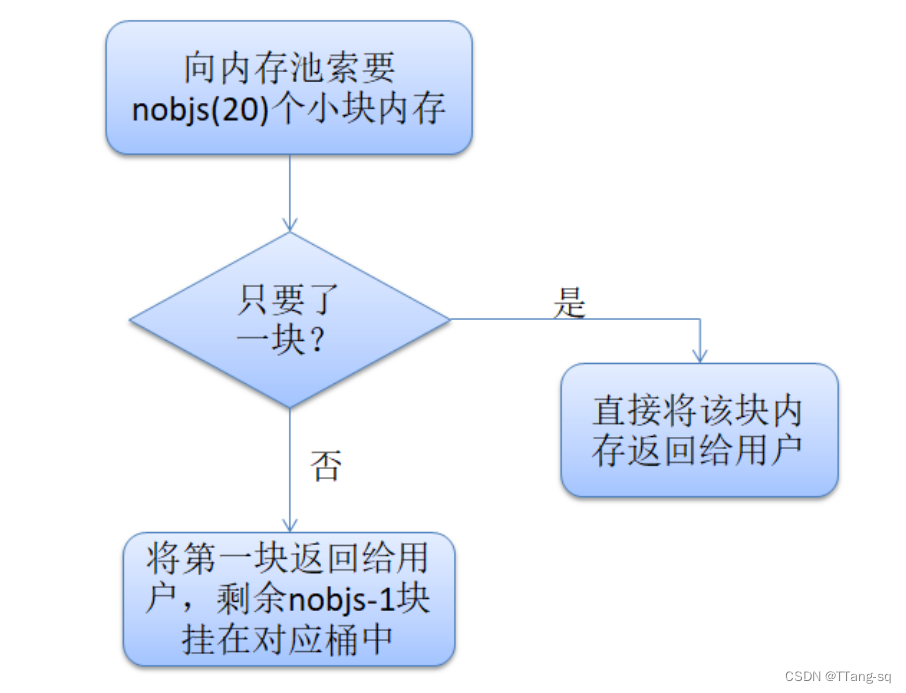
- 用户申请空间桶下没有空闲空间,于是需要向 内存池申请空间(见下)
- 一次申请 nobjs(20) 个小块内存,按用户需要分配,剩余的挂在桶下
// 函数功能:向哈希桶中补充空间
// 参数n:小块内存字节数
// 返回值:首个小块内存的首地址
template <int inst>
void* __default_alloc_template<inst>::refill(size_t n)
{
// 一次性向内存池索要20个n字节的小块内存
int nobjs = 20;
char * chunk = chunk_alloc(n, nobjs);
obj ** my_free_list;
obj *result;
obj *current_obj, *next_obj;
int i;
// 如果只要了一块,直接返回给用户使用
if (1 == nobjs)
return(chunk);
// 找到对应的桶号
my_free_list = free_list + FREELIST_INDEX(n);
// 将第一块返回值用户,其他块连接在对应的桶中
// 注:此处代码逻辑比较简单,标准库实现更复杂一些
result = (obj *)chunk;
*my_free_list = next_obj = (obj *)(chunk + n);
for (i = 1; ; i++)
{
current_obj = next_obj;
next_obj = (obj *)((char *)next_obj + n);
if (nobjs - 1 == i)
{
current_obj -> free_list_link = 0;
break;
}
else
{
current_obj -> free_list_link = next_obj;
}
}
return(result);
}
向内存池中索要空间:
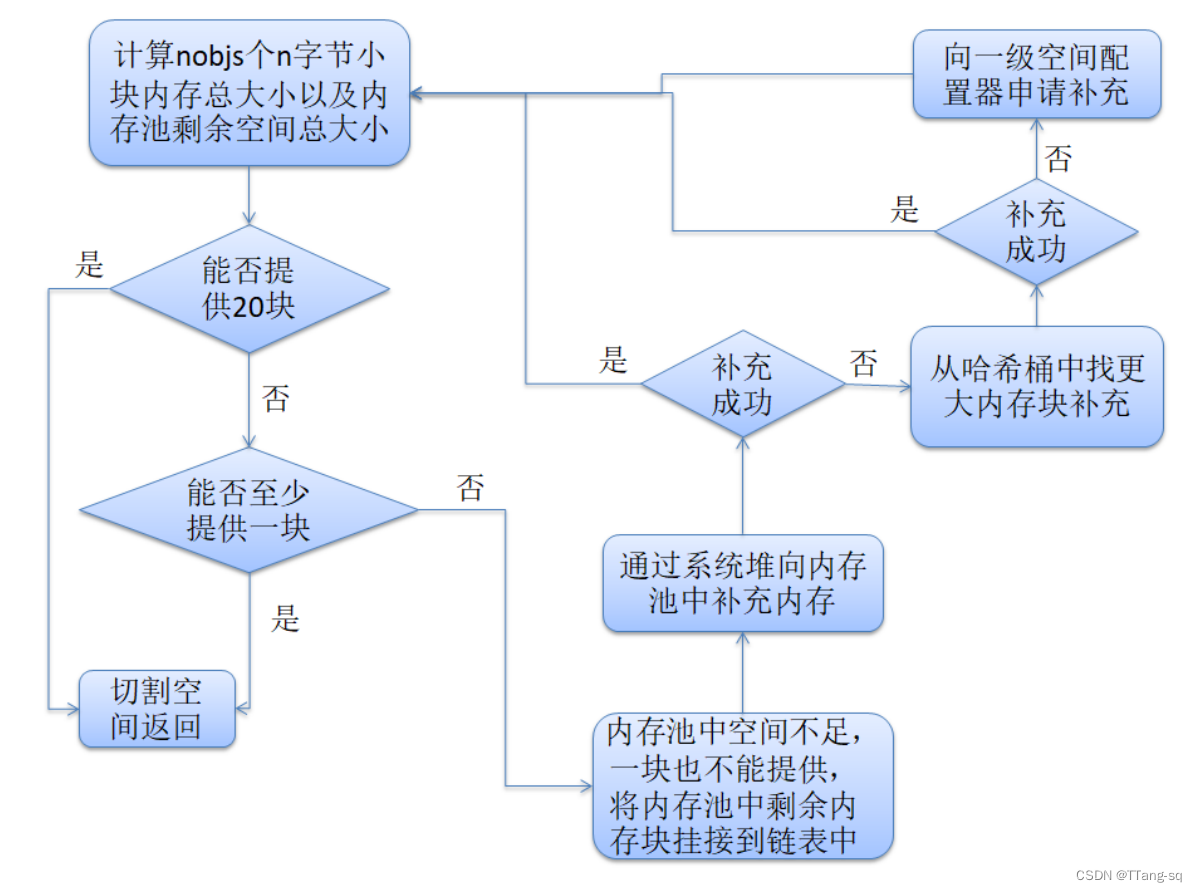
- 桶下无可使用空间,向内存池接着索要 nobjs(20) 个 n 字节小块,需要计算内存池剩余空间是否足够给出
- 如果剩余空间足够,就给出空间
- 如果剩余空间不够 20 块,就把能分配整数块空间一块一块的先切割出去
- 不足一块时,将剩余内存挂接到链表中,通过系统堆向内存池中补充内存
- 如果补充成功正常使用
- 如果补充失败,从哈希表中找到比请求空间更大的内存块进行补充
- 如果补充成功正常使用
- 如果再次补充失败,向一级空间配置器申请补充
template <int inst>
char* __default_alloc_template<inst>::chunk_alloc(size_t size, int&
nobjs)
{
// 计算nobjs个size字节内存块的总大小以及内存池中剩余空间总大小
char * result;
size_t total_bytes = size * nobjs;
size_t bytes_left = end_free - start_free;
// 如果内存池可以提供total_bytes字节,返回
if (bytes_left >= total_bytes)
{
result = start_free;
start_free += total_bytes;
return(result);
}
else if (bytes_left >= size)
{
// nobjs块无法提供,但是至少可以提供1块size字节内存块,提供后返回
nobjs = bytes_left/size;
total_bytes = size * nobjs;
result = start_free;
start_free += total_bytes;
return(result);
}
else
{
// 内存池空间不足,连一块小块村内都不能提供
// 向系统堆求助,往内存池中补充空间
// 计算向内存中补充空间大小:本次空间总大小两倍 + 向系统申请总大小/16
size_t bytes_to_get = 2 * total_bytes + ROUND_UP(heap_size >> 4);
// 如果内存池有剩余空间(该空间一定是8的整数倍),将该空间挂到对应哈希桶中
if (bytes_left > 0)
{
// 找对用哈希桶,将剩余空间挂在其上
obj ** my_free_list = free_list +
FREELIST_INDEX(bytes_left);
((obj *)start_free) -> free_list_link = *my_free_list;
*my_ree_list = (obj *)start_free;
}
// 通过系统堆向内存池补充空间,如果补充成功,递归继续分配
start_free = (char *)malloc(bytes_to_get);
if (0 == start_free)
{
// 通过系统堆补充空间失败,在哈希桶中找是否有没有使用的较大的内存块
int i;
obj ** my_free_list, *p;
for (i = size; i <= __MAX_BYTES; i += __ALIGN)
{
my_free_list = free_list + FREELIST_INDEX(i);
p = *my_free_list;
// 如果有,将该内存块补充进内存池,递归继续分配
if (0 != p)
{
*my_free_list = p -> free_list_link;
start_free = (char *)p;
end_free = start_free + i;
return(chunk_alloc(size, nobjs));
}
}
// 山穷水尽,只能向一级空间配置器求助
// 注意:此处一定要将end_free置空,因为一级空间配置器一旦抛异常就会出
问题
end_free = 0;
start_free = (char *)malloc_alloc::allocate(bytes_to_get);
}
// 通过系统堆向内存池补充空间成功,更新信息并继续分配
heap_size += bytes_to_get;
end_free = start_free + bytes_to_get;
return(chunk_alloc(size, nobjs));
}
}
SGI-STL 二级空间配置器之空间回收:
- 和申请一样,以 128 为分界线
- 大于 128 交给 一级空间配置器来释放
- 小与 128 则找到对应的哈希桶,头插 到其中

// 函数功能:用户将空间归还给空间配置器
// 参数:p空间首地址 n空间总大小
static void deallocate(void *p, size_t n)
{
obj *q = (obj *)p;
obj ** my_free_list;
// 如果空间不是小块内存,交给一级空间配置器回收
if (n > (size_t) __MAX_BYTES)
{
malloc_alloc::deallocate(p, n);
return;
}
// 找到对应的哈希桶,将内存挂在哈希桶中
my_free_list = free_list + FREELIST_INDEX(n);
q -> free_list_link = *my_free_list;
*my_free_list = q;
}
空间配置器的默认选择
SGI-STL 使用一级还是二级空间配置器,通过 USE_MALLOC 宏进行控制:
#ifdef __USE_MALLOC
typedef malloc_alloc alloc;
typedef malloc_alloc single_client_alloc;
#else
// 二级空间配置器定义
#endif
在 SGI_STL 中该宏没有定义,故,默认情况下 SGI_STL 使用二级空间配置器
空间配置器的在封装:添加了数据类型大小
// T: 元素类型
// Alloc: 空间配置器
// 注意:该类只负责申请与归还对象的空间,不否则空间中对象的构造与析构
template<class T, class Alloc>
class simple_alloc
{
public:
// 申请n个T类型对象大小的空间
static T *allocate(size_t n)
{
return 0 == n? 0 : (T*) Alloc::allocate(n * sizeof (T));
}
// 申请一个T类型对象大小的空间
static T *allocate(void)
{
return (T*) Alloc::allocate(sizeof (T));
}
// 释放n个T类型对象大小的空间
static void deallocate(T *p, size_t n)
{
if (0 != n)
Alloc::deallocate(p, n * sizeof (T));
}
// 释放一个T类型对象大小的空间
static void deallocate(T *p)
{
Alloc::deallocate(p, sizeof (T));
}
};
空间配置器对象的构造与析构
SGI-STL 对于空间申请释放和对象的构造析构的两个过程,是分离开的。
因为有些对象的构造不需要调用构造函数,销毁时不需要调用析构函数,将该过程分离开可以提高程序的性能。
// 归还空间时,先先调用该函数将对象中资源清理掉
template <class T>
inline void destroy(T* pointer)
{
pointer->~T();
}
// 空间申请好后调用该函数:利用placement-new完成对象的构造
template <class T1, class T2>
inline void construct(T1* p, const T2& value)
{
new (p) T1(value);
}
- 在释放对象时,需要根据对象的类型确定是否调用析构函数(类型萃取)
- 对象的类型可以通过迭代器萃取到
容器中的 allocator
展示 vector 的部分源码:
template <class T, class Alloc = alloc>
class list
{
// ...
// 实例化空间配置器
typedef simple_alloc<list_node, Alloc> list_node_allocator;
// ...
protected:
link_type get_node()
{
// 调用空间配置器接口先申请节点的空间
return list_node_allocator::allocate();
}
// 将节点归还给空间配置器
void put_node(link_type p)
{
list_node_allocator::deallocate(p);
}
// 创建节点:1. 申请空间 2. 完成节点构造
link_type create_node(const T& x)
{
link_type p = get_node();
construct(&p->data, x);
return p;
}
// 销毁节点: 1. 调用析构函数清理节点中资源 2. 将节点空间归还给空间配置器
void destroy_node(link_type p)
{
destroy(&p->data);
put_node(p);
}
// ...
iterator insert(iterator position, const T& x)
{
link_type tmp = create_node(x);
tmp->next = position.node;
tmp->prev = position.node->prev;
(link_type(position.node->prev))->next = tmp;
position.node->prev = tmp;
return tmp;
}
iterator erase(iterator position)
{
link_type next_node = link_type(position.node->next);
link_type prev_node = link_type(position.node->prev);
prev_node->next = next_node;
next_node->prev = prev_node;
destroy_node(position.node);
return iterator(next_node);
}
// ...
};
🥰如果本文对你有些帮助,请给个赞或收藏,你的支持是对作者大大莫大的鼓励!!(✿◡‿◡) 欢迎评论留言~~

![最值得收藏的顶级专业数据恢复软件列表 [持续更新]](https://img-blog.csdnimg.cn/img_convert/9c468fef582e83c2771ce4b6e1c0aa0b.jpeg)






![[VC++]圆形进度条](https://img-blog.csdnimg.cn/img_convert/f021c165bafac29476a7596f31711f05.gif)