最短路径问题
- 单源最短路径
- Dijkstra
- 算法原理
- 代码实现
- Bellman-Ford
- 算法原理
- 代码实现
- SPFA优化
- SPFA代码实现
- 多元最短路径
- Floyd-Warshall
- 算法原理
- 代码实现
单源最短路径
🚀最短路径:从图G的某个顶点出发到达另一个顶点的最短路径,其中最短是指路径上边的权值和最小。
🚀单源最短路径:从图G中的某一顶点出发到达其余顶点的最短路径。
Dijkstra
算法原理
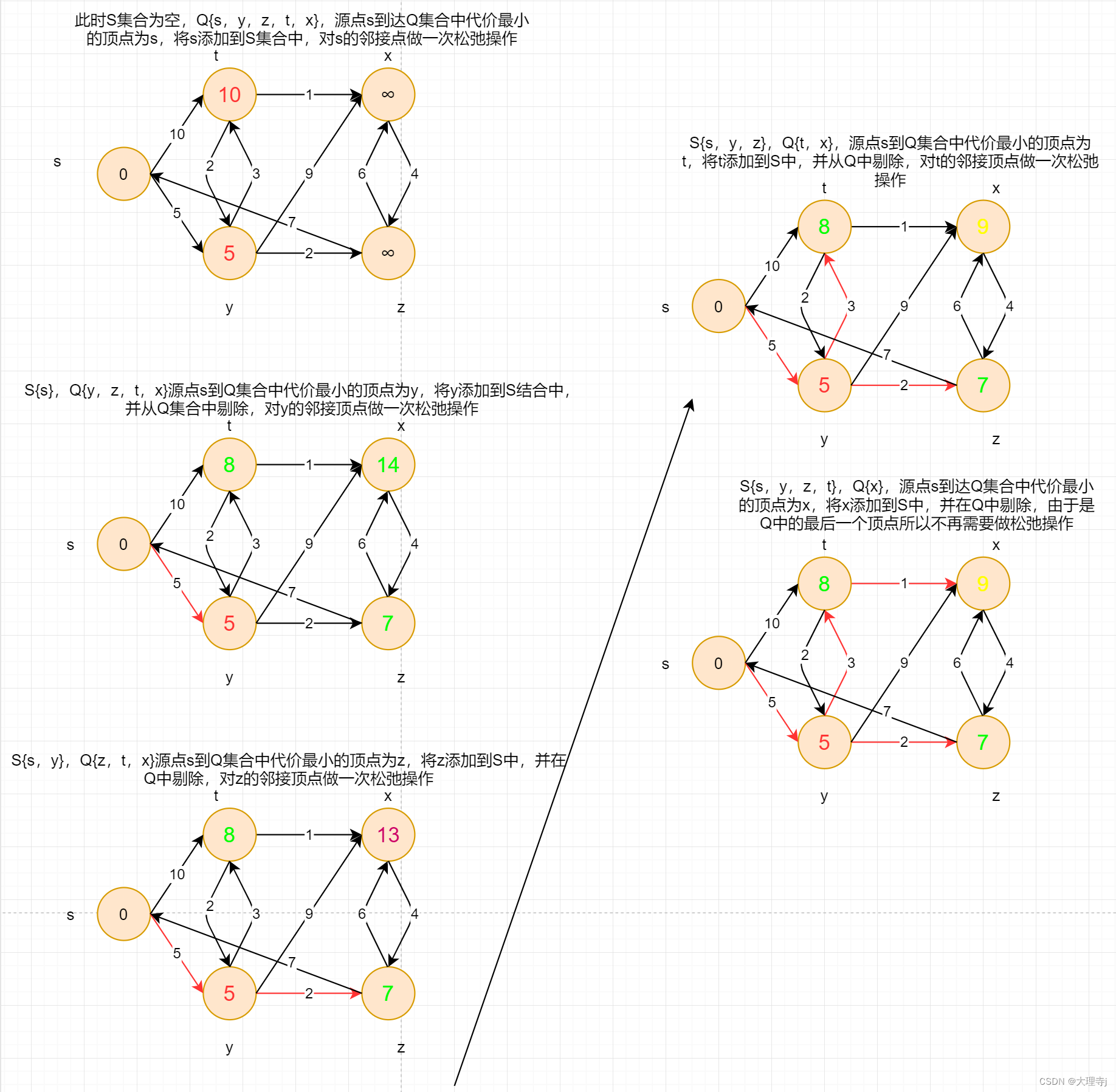
🚀针对一个带权有向图,将所有的顶点划分为两个集合S和Q,S是已经确定最短路径的顶点结合,Q是还未确定最短路径的顶点集合。每次从Q中找出一个从起点s到达该结点代价最小(权值和最小)的结点u(可见迪杰斯特拉算法同样采取的是贪心策略),将u从集合Q中移除,并放入S中,对u所邻接的顶点做一次松弛操作。松弛操作即对结点u的邻接点v,判断从起点s到u的代价+u到v的代价是否小于s到v的代价,若小于那么对s到v的代价替换为s到u的代价+u到v的代价。这样依次从Q中选出结点u,直到Q为空为止。
算法特点:比较与其他最短路径的算法,迪杰斯特拉算法的效率较优。但是,此算法只能用于没有负权值的图。
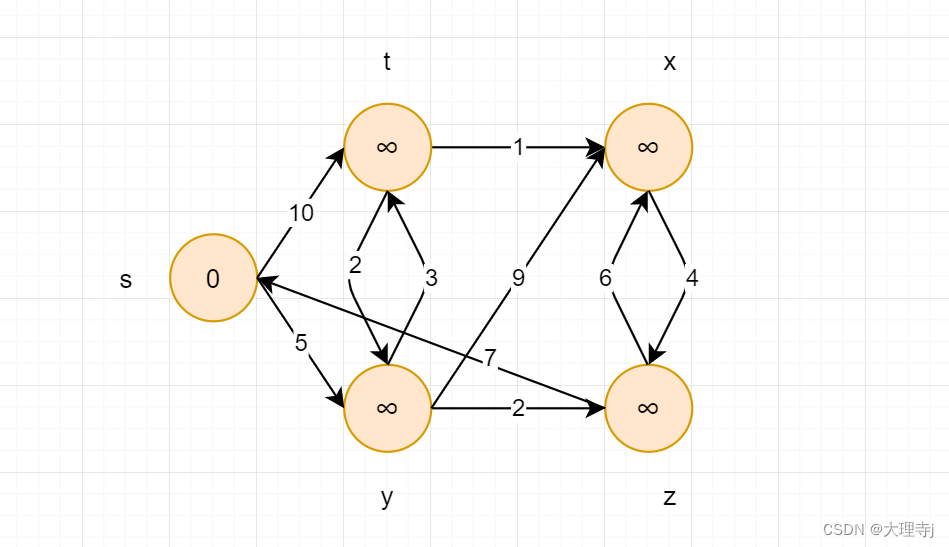
源点为s,即求s到达其他顶点的最短路径。在初始时,s到达其他边的路径长度均为无穷大 ,到达自身的距离为0。
算法执行过程:
代码实现
void Dijkstra(const V& src, std::vector<W>& dist, std::vector<int>& parent_path) {
//初始化工作
size_t n = _vertex.size();
size_t srci = this->GetVertexIndex(src);
dist.resize(n, W_MAX);
dist[srci] = 0;
parent_path.resize(n, -1);
std::vector<bool> S(n, false); //已选出的顶点集合S
for (size_t i = 0; i < n; i++) {
//从dist中选出最短的一条边,S->u
size_t u = -1;
W min_eg = W_MAX;
for (size_t j = 0; j < n; j++) {
if (dist[j] < min_eg && false == S[j]) {
u = j;
min_eg = dist[j];
}
}
//将这个顶点添加到S集合中
S[u] = true;
//更新从起始点srci能够到达的其他点的最短路径dist数组
for (size_t i = 0; i < n; i++) {
if (_matrix[u][i] != W_MAX && false == S[i] && dist[u] + _matrix[u][i] < dist[i]) {
dist[i] = dist[u] + _matrix[u][i];
parent_path[i] = u;
}
}
}
}
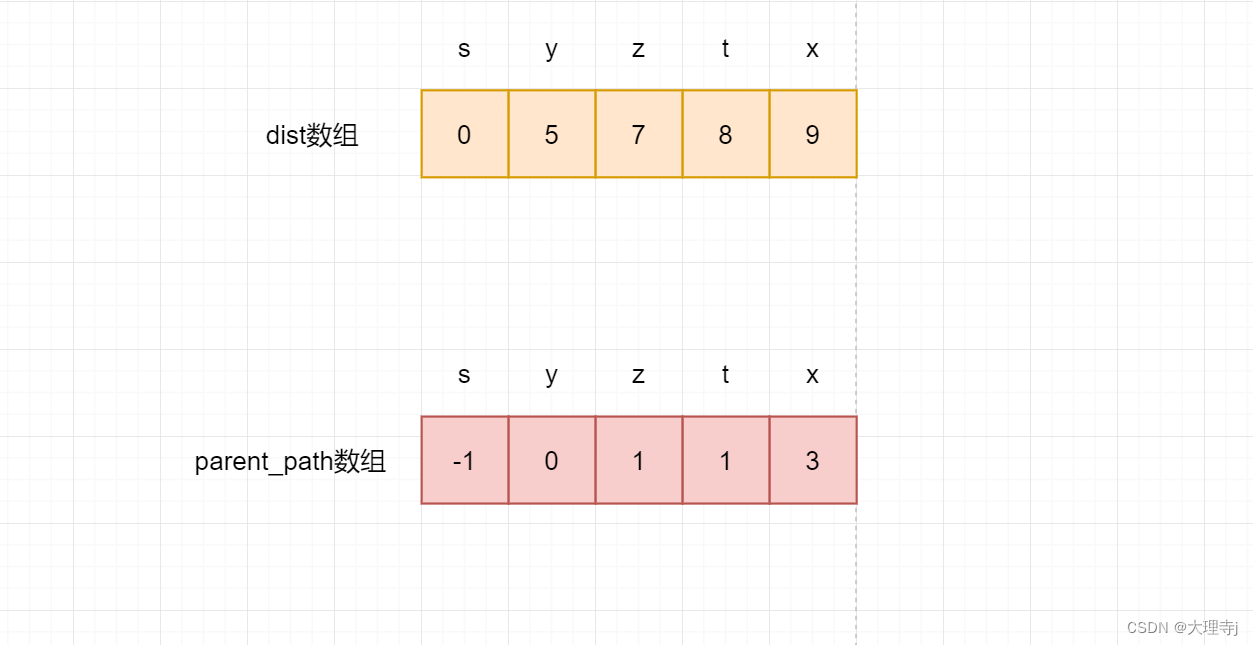
dist数组和parent_path数组解释:将源点s到达其他顶点的最短路径数值存储在dist数组中,dist[i]即为源点s到达i号顶点的最短距离。parent_path数组用来记录源点s到达其他顶点的最短路径,采用的是双亲表示法,即该结点存储的内容为源点s到达这个结点路径上的上一个结点的下标。
🚀上面例子中最终两个数值的内容如下:
Bellman-Ford
算法原理
🚀迪杰斯特拉算法不能解决带负权值路径的情况,贝尔曼算法可以解决这一问题。相比于迪杰斯特拉的贪心策略,贝尔曼算法是一种较为暴力的解法,即对每一个结点都做一次松弛操作,但是一轮松弛操作往往不能得到最终结果,存在最短路径于最短路径权值和对应不上的情况,所以要经过多轮更新才能得到最终结果。最多轮次为n-1轮(n:顶点个数),如果说第n轮更新还能有顶点松弛成功说明存在权值和为负数的环路情况,这种情况贝尔曼算法也是解决不了的(权值和为负数的环路意味着每轮更新都能得到一个更小的结果,是无休止的)。
只经过一轮更新不能的到最终结果的例子:
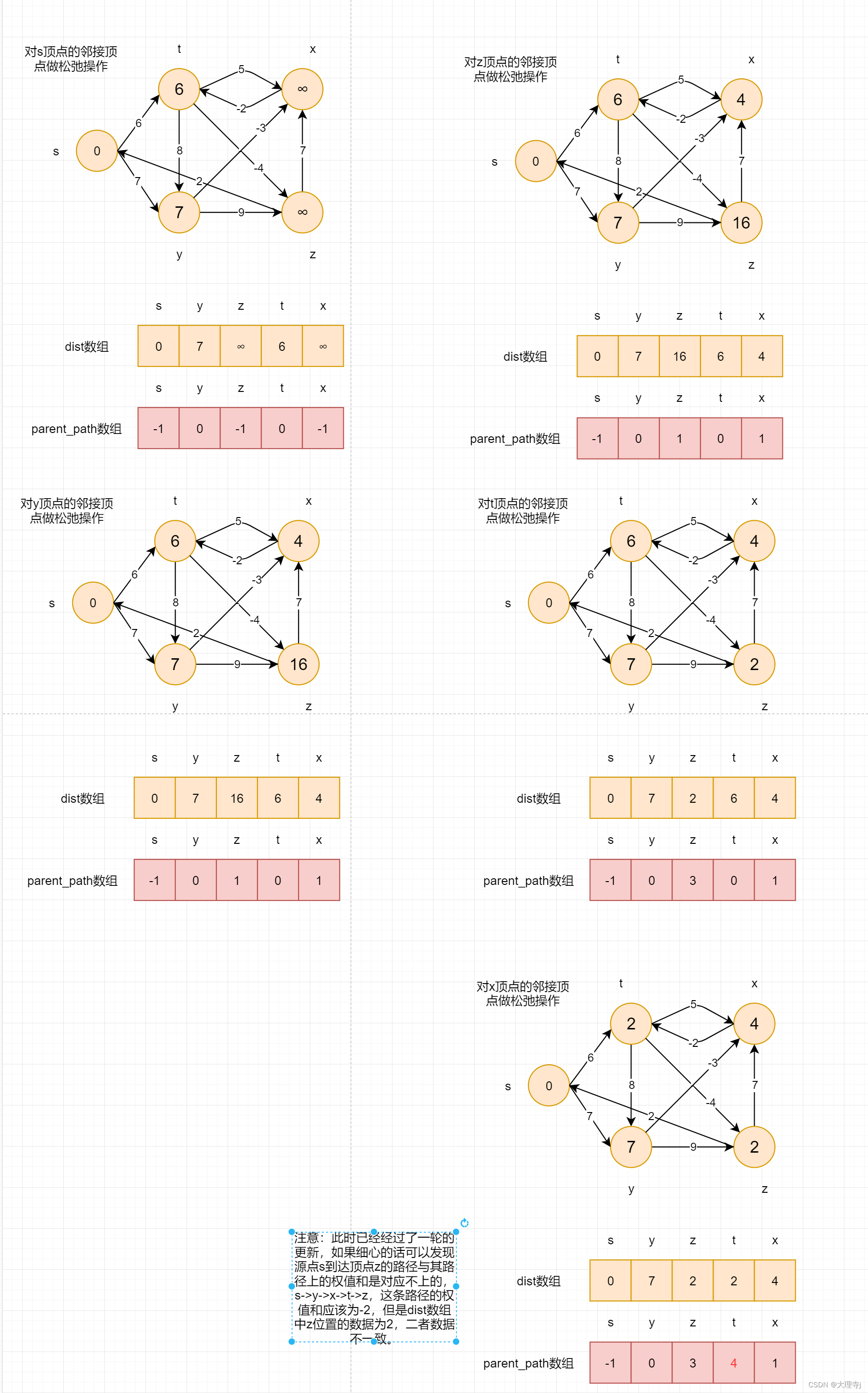
产生上图中这样结果的原因在于更新源点s到达z顶点的最短路径是由对t顶点的邻接顶点做松弛操作得到的,但是在更新源点s到达z的最短路径之后,在对x的邻接顶点做松弛操作的时候,又重新修改了源点s到达t顶点的最短路径,此时在parent_path数组中t位置的数据修改成了x的下标,同样也因此导致了s到达z顶点的路径于路径上的权值和不一致的情况。所以要对t的邻接顶点重新做一次松弛操作,上面这种情况再对t的邻接顶点做一次松弛操作就可以解决问题,但是对于其他更为复杂的问题可能仍旧需要新一轮的松弛操作。那么,松弛操作轮数的上限是多少次呢?n - 1次因为源点出发到达另一个顶点的最短路径至多经过n - 1条边,所以至多经过n - 1轮的更新就能得到最终结果,但是如果第n轮时仍旧存在到达某个点的最短路径发生了更新,那么就说明存在权值和为负数的环路问题。
代码实现
bool Bellman(const V& src, std::vector<W>& dist, std::vector<int>& parent_path) {
//初始化结构
size_t n = _vertex.size();
size_t srci = this->GetVertexIndex(src);
dist.resize(n, W_MAX);
dist[srci] = 0;
parent_path.resize(n, -1);
//寻找最短路径
for (size_t k = 0; k < n - 1; ++k) {
bool update = false;
//update小的优化--如果此轮更新中没有任何一条边松弛成功,此时就可以break退出
std::cout << "第" << k + 1 << "轮更新: \n";
for (size_t i = 0; i < n; i++) {
for (size_t j = 0; j < n; j++) {
if (_matrix[i][j] != W_MAX && dist[i] + _matrix[i][j] < dist[j]) {
update = true;
dist[j] = dist[i] + _matrix[i][j];
std::cout << i << "->" << j << ":" << dist[j] << std::endl;
parent_path[j] = i;
}
}
}
if (false == update) {
break;
}
}
//如果经过n-1轮还能进行更新说明出现了负权值环路问题
for (size_t i = 0; i < n; i++) {
for (size_t j = 0; j < n; j++) {
if (_matrix[i][j] != W_MAX && dist[i] + _matrix[i][j] < dist[j]) {
return false;
}
}
}
return true;
}
SPFA优化
🚀在上面分析一轮的松弛操作可能不能得到最终结果的问题时,解决方案就是再对t顶点的邻接顶点做一次松弛操作即可,并不用再对其他顶点做一次松弛操作,也就是说如果要在下一轮中再次对某个顶点的邻接顶点做松弛操作,那么这个顶点一定在本轮中得到了最短路径的更新,否则其不会对其他顶点产生影响。
🚀SPFA算法就是对上面代码中写的贝尔曼算法的一个优化,就是说如果要在下一轮中再次对某个顶点的邻接顶点做松弛操作,那么这个顶点一定在本轮中得到了最短路径的更新,所以在第一轮更新中所有顶点都需要更新,把所有的顶点都入队列,在后续的更新中,如果某个顶点在本轮没有被更新那么其也不会对其他顶点产生影响,就不用再次入队列,相反需要再次入队列, 这样循环置队列为空即可。
SPFA代码实现
void BellmanSPFA(const V& src, std::vector<W>& dist, std::vector<int>& parent_path) {
//初始化结构
size_t n = _vertex.size();
size_t srci = this->GetVertexIndex(src);
dist.resize(n, W_MAX);
dist[srci] = 0;
parent_path.resize(n, -1);
std::queue<size_t> q;
std::vector<bool> flag(n, false);
q.push(srci);
flag[srci] = true;
while (!q.empty()) {
size_t top = q.front();
q.pop();
flag[top] = false;
for (size_t i = 0; i < n; i++) {
if (_matrix[top][i] != W_MAX && dist[top] + _matrix[top][i] < dist[i]) {
dist[i] = dist[top] + _matrix[top][i];
parent_path[i] = top;
if (flag[i] == false) {
q.push(i);
flag[i] = true;
}
}
}
}
}
多元最短路径
Floyd-Warshall
算法原理
🚀佛洛依德算法是一个解决多源的最短路径问题的经典算法,它能够计算出每个顶点到达其余顶点的最短路径,对应用场景通常是带负权值的多源最短路径问题。
🚀佛洛依德算法采用的是动态规划的思想,顶点i到达顶点j的最短路径上至少经过了0个其他顶点,至多经过了n - 2个其他顶点,其状态标识可以定义为dp[i][j][m],标识顶点i到达顶点j的最短路径上经过了k个其余顶点,其余顶点就是除了起始顶点和终止顶点的其他顶点记作k(k有n-2种取值可能),所以如果i到j的最短路径经过k,那么dp[i][j][m] = dp[i][k][m-1] + dp[k][j][m-1],如果i到j的最短路径不经过k,dp[i][j][m] = dp[i][j][m-1],所以最终dp[i][j][m] = min(dp[i][j][m-1],dp[i][k][m-1]+dp[k][j][m-1])。在正常写代码时通常将其优化为二维的动态规划,因为第三维的m总是依赖于m-1的。
代码实现
void Floyd(std::vector<std::vector<W>>& dist, std::vector<std::vector<int>>& parent_path) {
//初始化结构
size_t n = _vertex.size();
dist.resize(n);
parent_path.resize(n);
for (size_t i = 0; i < n; ++i) {
dist[i].resize(n, W_MAX);
parent_path[i].resize(n, -1);
}
//初始化直接相连的边
for (size_t i = 0; i < n; i++) {
for (size_t j = 0; j < n; j++) {
if (_matrix[i][j] != W_MAX) {
dist[i][j] = _matrix[i][j];
parent_path[i][j] = i;
}
if (i == j) {
dist[i][j] = 0;
}
}
}
//动态规划
for (size_t k = 0; k < n; ++k) {
for (size_t i = 0; i < n; ++i) {
for (size_t j = 0; j < n; ++j) {
if (dist[i][k] != W_MAX && dist[k][j] != W_MAX &&
dist[i][k] + dist[k][j] < dist[i][j]) {
//更新
dist[i][j] = dist[i][k] + dist[k][j];
parent_path[i][j] = parent_path[k][j];
}
}
}
}
}