# include <opencv2/opencv.hpp> # include <iostream> # include <opencv2/highgui/highgui.hpp> # include <opencv2/imgproc/imgproc.hpp> using namespace std;
using namespace cv;
# include <iostream> # include <fstream> using namespace cv;
# include <opencv2/core/core.hpp> # include <opencv2/opencv.hpp> void colorReduce ( Mat& inputImage, Mat& outputImage, int div) ;
int main ( )
{
Mat srcImage = imread ( "1.jpg" ) ;
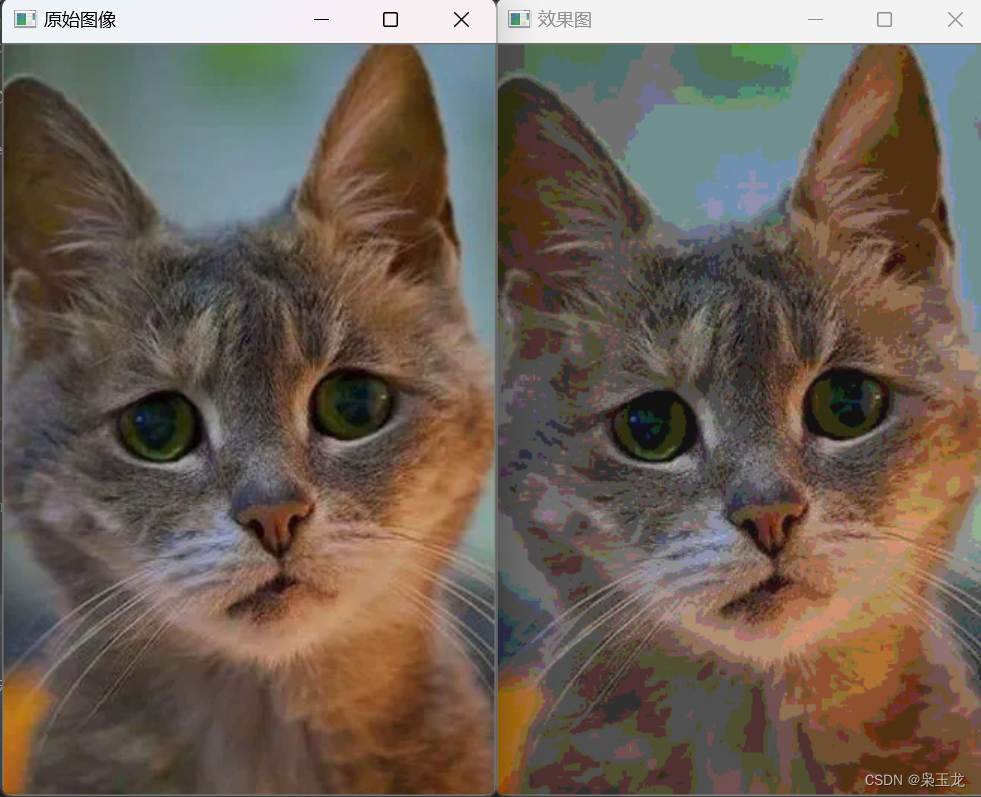
imshow ( "原始图像" , srcImage) ;
Mat dstImage;
dstImage. create ( srcImage. rows, srcImage. cols, srcImage. type ( ) ) ;
double time0 = static_cast < double > ( getTickCount ( ) ) ;
colorReduce ( srcImage, dstImage, 32 ) ;
time0 = ( ( double ) getTickCount ( ) - time0) / getTickFrequency ( ) ; cout << "此方法运行时间为: " << time0 << "秒" << endl;
imshow ( "效果图" , dstImage) ;
waitKey ( 0 ) ;
}
void colorReduce ( Mat& inputImage, Mat& outputImage, int div)
{
outputImage = inputImage. clone ( ) ;
int rowNumber = outputImage. rows;
int colNumber = outputImage. cols * outputImage. channels ( ) ;
for ( int i = 0 ; i < rowNumber; i++ )
{
uchar* data = outputImage. ptr < uchar> ( i) ;
for ( int j = 0 ; j < colNumber; j++ )
{
data[ j] = data[ j] / div * div + div / 2 ;
}
}
}
# include <opencv2/opencv.hpp> int main ( ) {
cv:: Mat image = cv:: imread ( "path/to/your/image.jpg" ) ;
if ( image. empty ( ) ) {
std:: cerr << "Error: Could not read the image." << std:: endl;
return - 1 ;
}
int rows = image. rows;
int cols = image. cols;
for ( int i = 0 ; i < rows; ++ i) {
for ( int j = 0 ; j < cols; ++ j) {
cv:: Vec3b& pixel = image. at < cv:: Vec3b> ( i, j) ;
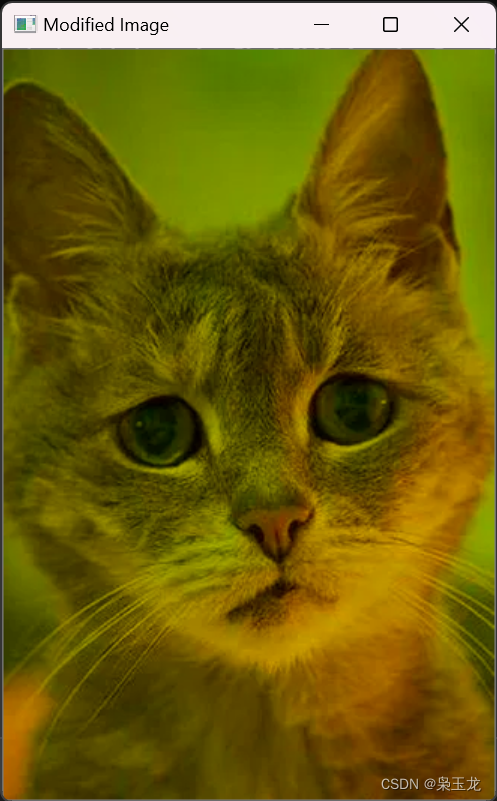
pixel[ 0 ] = 0 ;
pixel[ 1 ] = pixel[ 1 ] ;
pixel[ 2 ] = pixel[ 2 ] ;
}
}
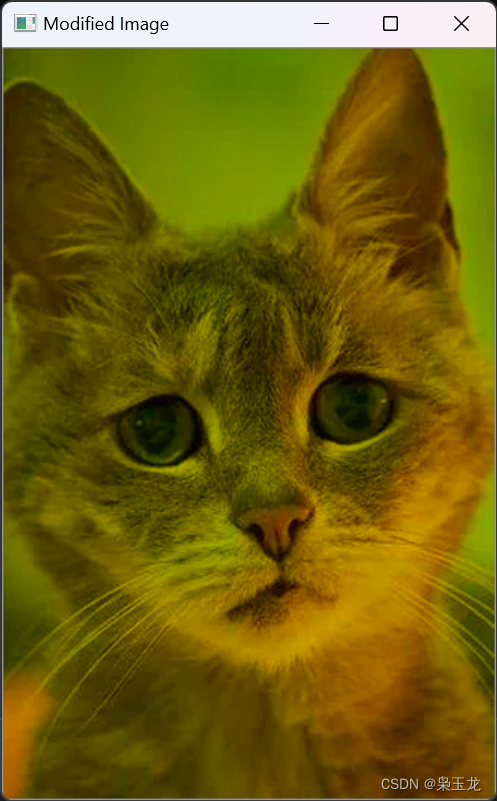
cv:: imshow ( "Modified Image" , image) ;
cv:: waitKey ( 0 ) ;
return 0 ;
}
# include <opencv2/opencv.hpp> # include <iostream> # include <opencv2/highgui/highgui.hpp> # include <opencv2/imgproc/imgproc.hpp> using namespace std;
using namespace cv;
# include <iostream> # include <fstream> using namespace cv;
# include <opencv2/core/core.hpp> # include <opencv2/opencv.hpp> void colorReduce ( Mat& inputImage, Mat& outputImage, int div) ;
int main ( )
{
Mat srcImage = imread ( "1.jpg" ) ;
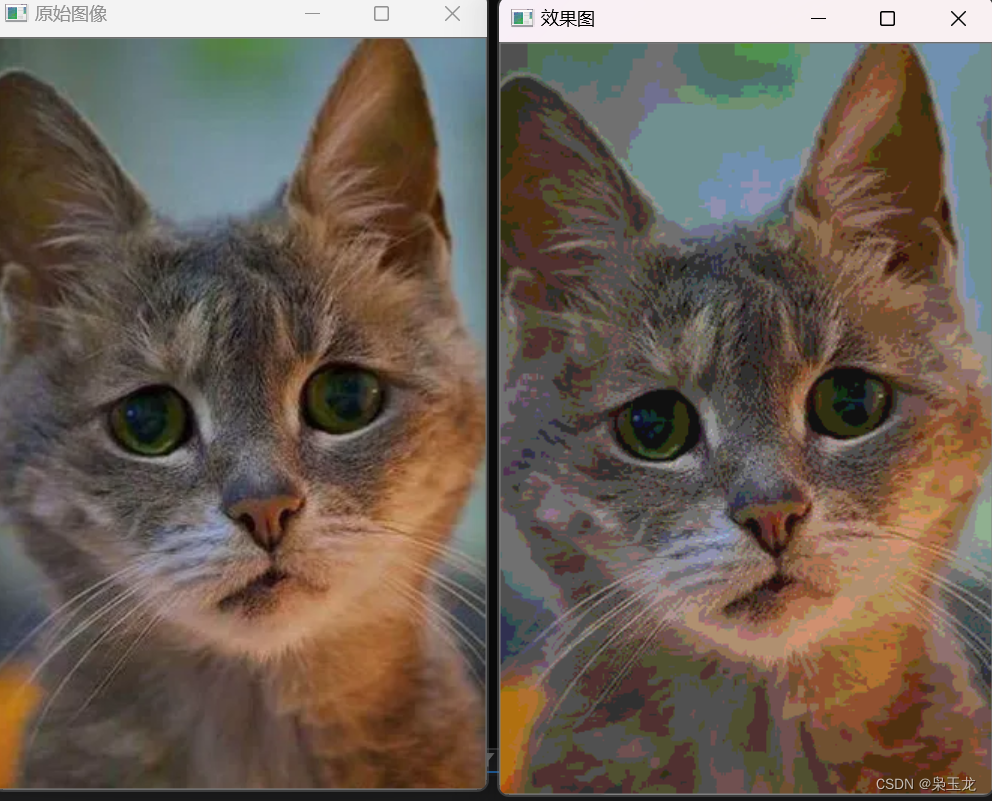
imshow ( "原始图像" , srcImage) ;
Mat dstImage;
dstImage. create ( srcImage. rows, srcImage. cols, srcImage. type ( ) ) ;
double time0 = static_cast < double > ( getTickCount ( ) ) ;
colorReduce ( srcImage, dstImage, 32 ) ;
time0 = ( ( double ) getTickCount ( ) - time0) / getTickFrequency ( ) ; cout << "此方法运行时间为: " << time0 << "秒" << endl;
imshow ( "效果图" , dstImage) ;
waitKey ( 0 ) ;
}
void colorReduce ( Mat& inputImage, Mat & outputImage, int div)
{
outputImage = inputImage. clone ( ) ;
Mat_< Vec3b> :: iterator it = outputImage. begin < Vec3b> ( ) ;
Mat_< Vec3b> :: iterator itend = outputImage. end < Vec3b> ( ) ;
for ( ; it != itend; ++ it)
{
( * it) [ 0 ] = ( * it) [ 0 ] / div* div + div/ 2 ;
( * it) [ 1 ] = ( * it) [ 1 ] / div* div + div/ 2 ;
( * it) [ 2 ] = ( * it) [ 2 ] / div* div + div/ 2 ;
}
}
# include <opencv2/opencv.hpp> int main ( ) {
cv:: Mat image = cv:: imread ( "1.jpg" ) ;
if ( image. empty ( ) ) {
std:: cerr << "Error: Could not read the image." << std:: endl;
return - 1 ;
}
for ( cv:: MatIterator_< cv:: Vec3b> it = image. begin < cv:: Vec3b> ( ) ; it != image. end < cv:: Vec3b> ( ) ; ++ it) {
cv:: Vec3b& pixel = ( * it) ;
pixel[ 0 ] = 0 ;
pixel[ 1 ] = pixel[ 1 ] ;
pixel[ 2 ] = pixel[ 2 ] ;
}
cv:: imshow ( "Modified Image" , image) ;
cv:: waitKey ( 0 ) ;
return 0 ;
}
# include <opencv2/opencv.hpp> # include <iostream> # include <opencv2/highgui/highgui.hpp> # include <opencv2/imgproc/imgproc.hpp> using namespace std;
using namespace cv;
# include <iostream> # include <fstream> using namespace cv;
# include <opencv2/core/core.hpp> # include <opencv2/opencv.hpp> void colorReduce ( Mat& inputImage, Mat& outputImage, int div) ;
int main ( )
{
Mat srcImage = imread ( "1.jpg" ) ;
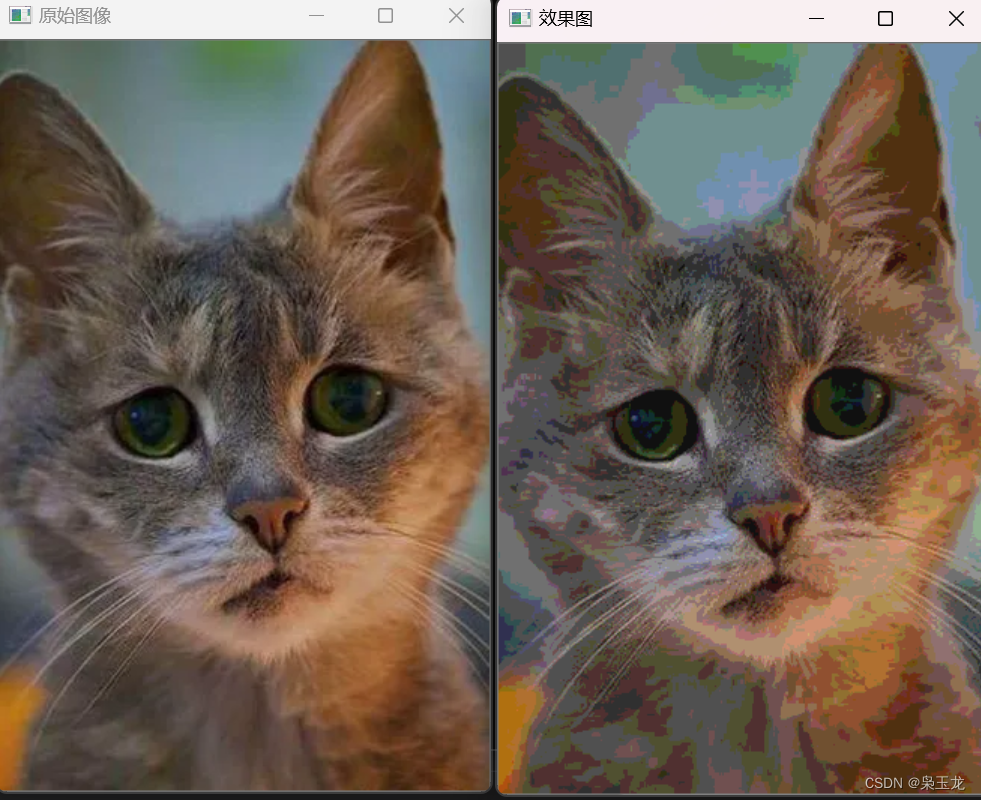
imshow ( "原始图像" , srcImage) ;
Mat dstImage;
dstImage. create ( srcImage. rows, srcImage. cols, srcImage. type ( ) ) ;
double time0 = static_cast < double > ( getTickCount ( ) ) ;
colorReduce ( srcImage, dstImage, 32 ) ;
time0 = ( ( double ) getTickCount ( ) - time0) / getTickFrequency ( ) ; cout << "此方法运行时间为: " << time0 << "秒" << endl;
imshow ( "效果图" , dstImage) ;
waitKey ( 0 ) ;
}
void colorReduce ( Mat& inputImage, Mat& outputImage, int div) {
outputImage = inputImage. clone ( ) ;
int rowNumber = outputImage. rows;
int colNumber = outputImage. cols;
for ( int i = 0 ; i < rowNumber; i++ )
{
for ( int j = 0 ; j < colNumber; j++ )
{
outputImage. at < Vec3b> ( i, j) [ 0 ] =
outputImage. at < Vec3b> ( i, j) [ 0 ] / div * div + div / 2 ;
outputImage. at < Vec3b> ( i, j) [ 1 ] = outputImage. at < Vec3b> ( i, j) [ 1 ] / div * div + div / 2 ;
outputImage. at < Vec3b> ( i, j) [ 2 ] =
outputImage. at < Vec3b> ( i, j) [ 2 ] / div * div + div / 2 ;
}
}
}
# include <opencv2/opencv.hpp> int main ( ) {
cv:: Mat image = cv:: imread ( "1.jpg" ) ;
if ( image. empty ( ) ) {
std:: cerr << "Error: Could not read the image." << std:: endl;
return - 1 ;
}
int rows = image. rows;
int cols = image. cols;
for ( int i = 0 ; i < rows; ++ i) {
uchar* rowPtr = image. ptr < uchar> ( i) ;
for ( int j = 0 ; j < cols; ++ j) {
int offset = j * image. channels ( ) ;
rowPtr[ offset] = 0 ;
rowPtr[ offset + 1 ] = rowPtr[ offset + 1 ] ;
rowPtr[ offset + 2 ] = rowPtr[ offset + 2 ] ;
}
}
cv:: imshow ( "Modified Image" , image) ;
cv:: waitKey ( 0 ) ;
return 0 ;
}