算法流程:
(1)点云下采样(体素滤波);
(2)ransac算法分割拟合地面平面;
(3)裁剪工作区域(指定空间中四个点,裁剪点云只保留在(2)中平面上的投影在四边形内部的点);
(4)再用ransac算法去除多余平面;
(5)Euclidean聚类算法分割出目标物体的点云簇;
(6)通过包围盒算法计算包围盒。
改进OBB包围盒
由于物体是放在地面上,因此可以利用地面平面的法向量约束物体包围盒的朝向。具体做法如下:
- 把物体点云投影到桌面平面上得到底面投影点云;
- 计算底面的obb外接矩形,得到物体包围盒的朝向从而建立局部坐标系;
- 将物体点云投影到局部坐标系z轴上得到投影轴线的点云;
- 投影得到点云的中心作为物体包围盒的中心;
- 通过物体包围盒的朝向和中心确定其包围盒。
#include <iostream>
#include <opencv2/opencv.hpp>
#include <Eigen/Eigenvalues>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/ModelCoefficients.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/filters/extract_indices.h>
#include <pcl/filters/project_inliers.h>
#include <pcl/filters/statistical_outlier_removal.h>
#include <pcl/sample_consensus/model_types.h>
#include <pcl/sample_consensus/method_types.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/segmentation/extract_clusters.h>
#include <pcl/features/normal_3d.h>
#include <pcl/features/moment_of_inertia_estimation.h>
#include <pcl/sample_consensus/ransac.h>
#include <pcl/sample_consensus/sac_model_plane.h>
#include <pcl/common/common.h>
#include <pcl/common/transforms.h>
#include <pcl/common/distances.h>
#include <pcl/visualization/pcl_visualizer.h>
#define DEBUG
#define VIEWER
//包围盒结构体
struct BoundingBox
{
Eigen::Vector3f center;
Eigen::Quaternionf quat;
float width;
float height;
float depth;
};
//判断点是否在四边形工作区域内
bool point_in_quadrangle(pcl::PointXYZ p, pcl::PointCloud<pcl::PointXYZ>::Ptr pts)
{
float a = (pts->points[1].x - pts->points[0].x) * (p.y - pts->points[0].y) - (pts->points[1].y - pts->points[0].y) * (p.x - pts->points[0].x);
float b = (pts->points[2].x - pts->points[1].x) * (p.y - pts->points[1].y) - (pts->points[2].y - pts->points[1].y) * (p.x - pts->points[1].x);
float c = (pts->points[3].x - pts->points[2].x) * (p.y - pts->points[2].y) - (pts->points[3].y - pts->points[2].y) * (p.x - pts->points[2].x);
float d = (pts->points[0].x - pts->points[3].x) * (p.y - pts->points[3].y) - (pts->points[0].y - pts->points[3].y) * (p.x - pts->points[3].x);
return (a > 0 && b > 0 && c > 0 && d > 0) || (a < 0 && b < 0 && c < 0 && d < 0);
}
int main(int argc, char* argv[])
{
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGB>);
pcl::io::loadPCDFile("cloud.pcd", *cloud);
if (!cloud->size())
{
std::cout << "point cloud is empty!" << std::endl;
return -1;
}
std::cout << "points nums:" << cloud->size() << std::endl;
/*体素滤波*/
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZRGB>);
pcl::VoxelGrid<pcl::PointXYZRGB> vg;
vg.setInputCloud(cloud);
vg.setLeafSize(10, 10, 10);
vg.filter(*cloud_filtered);
std::cout << "points nums after filter:" << cloud_filtered->size() << std::endl;
#ifdef DEBUG
pcl::io::savePCDFile("cloud_filtered.pcd", *cloud_filtered);
#endif
/*ransac分割地面*/
pcl::SampleConsensusModelPlane<pcl::PointXYZRGB>::Ptr model_plane(new pcl::SampleConsensusModelPlane<pcl::PointXYZRGB>(cloud_filtered));
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_plane(new pcl::PointCloud<pcl::PointXYZRGB>);
std::vector<int> inliers_indices;
Eigen::VectorXf coefficients;
pcl::RandomSampleConsensus<pcl::PointXYZRGB> ransac(model_plane);
ransac.setDistanceThreshold(10);
ransac.computeModel();
ransac.getInliers(inliers_indices);
ransac.getModelCoefficients(coefficients);
pcl::copyPointCloud(*cloud_filtered, inliers_indices, *cloud_plane);
#ifdef DEBUG
pcl::io::savePCDFile("cloud_plane.pcd", *cloud_plane);
#endif
/*裁剪工作区域*/
Eigen::Matrix3f rot = Eigen::Quaternionf::FromTwoVectors( \
Eigen::Vector3f(coefficients[0], coefficients[1], coefficients[2]), \
Eigen::Vector3f(0, 0, 1)).toRotationMatrix();
Eigen::Matrix4f transformation_matrix = Eigen::Matrix4f::Identity();
transformation_matrix.topLeftCorner(3, 3) = rot;
Eigen::MatrixXf plane_origin(4, 1), plane_transformed(4, 1);
plane_origin << coefficients[0], coefficients[1], coefficients[2], coefficients[3];
plane_transformed = transformation_matrix * plane_origin;
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_transformed(new pcl::PointCloud<pcl::PointXYZRGB>);
pcl::transformPointCloud(*cloud_filtered, *cloud_transformed, transformation_matrix);
#ifdef DEBUG
pcl::io::savePCDFile("cloud_transformed.pcd", *cloud_transformed);
#endif
pcl::PointCloud<pcl::PointXYZ>::Ptr workspace_points3d(new pcl::PointCloud<pcl::PointXYZ>);
workspace_points3d->push_back(pcl::PointXYZ(-720, 486, 1564));
workspace_points3d->push_back(pcl::PointXYZ(463, 492, 1543));
workspace_points3d->push_back(pcl::PointXYZ(427, 118, 2714));
workspace_points3d->push_back(pcl::PointXYZ(-750, 76, 2825));
pcl::transformPointCloud(*workspace_points3d, *workspace_points3d, transformation_matrix);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_workspace(new pcl::PointCloud<pcl::PointXYZ>);
for (size_t i = 0; i < cloud_transformed->size(); i++)
{
pcl::PointXYZ p(cloud_transformed->points[i].x, cloud_transformed->points[i].y, cloud_transformed->points[i].z);
if (point_in_quadrangle(p, workspace_points3d))
{
cloud_workspace->push_back(p);
}
}
if (!cloud_workspace->size())
{
std::cout << "get workspace failed!" << std::endl;
return -1;
}
#ifdef DEBUG
pcl::io::savePCDFile("cloud_workspace.pcd", *cloud_workspace);
#endif
/*目标物体分割*/
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_segmented(new pcl::PointCloud<pcl::PointXYZ>);
//for (size_t i = 0; i < cloud_workspace->size(); i++)
//{
// Eigen::Vector4f vec(plane_transformed(0, 0), plane_transformed(1, 0), plane_transformed(2, 0), plane_transformed(3, 0));
// if (pcl::pointToPlaneDistance(cloud_workspace->points[i], vec) > 20)
// {
// cloud_segmented->push_back(cloud_workspace->points[i]);
// }
//}
pcl::ModelCoefficients::Ptr plane_coefficients(new pcl::ModelCoefficients);
pcl::PointIndices::Ptr inliers(new pcl::PointIndices);
pcl::SACSegmentation<pcl::PointXYZ> seg;
seg.setOptimizeCoefficients(true);
seg.setModelType(pcl::SACMODEL_PLANE);
seg.setMethodType(pcl::SAC_RANSAC);
seg.setDistanceThreshold(20);
seg.setInputCloud(cloud_workspace);
seg.segment(*inliers, *plane_coefficients);
pcl::ExtractIndices<pcl::PointXYZ> extract;
extract.setInputCloud(cloud_workspace);
extract.setIndices(inliers);
extract.setNegative(true);
extract.filter(*cloud_segmented);
std::cout << "points nums after segment:" << cloud_segmented->size() << std::endl;
if (!cloud_segmented->size())
{
std::cout << "segment failed!" << std::endl;
return -1;
}
#ifdef DEBUG
pcl::io::savePCDFile("cloud_segmented.pcd", *cloud_segmented);
#endif
/*Euclidean聚类*/
pcl::search::KdTree<pcl::PointXYZ>::Ptr kdtree(new pcl::search::KdTree<pcl::PointXYZ>);
kdtree->setInputCloud(cloud_segmented);
pcl::EuclideanClusterExtraction<pcl::PointXYZ> clustering;
std::vector<pcl::PointIndices> clusters;
clustering.setClusterTolerance(20);
clustering.setMinClusterSize(100);
clustering.setMaxClusterSize(10000);
clustering.setSearchMethod(kdtree);
clustering.setInputCloud(cloud_segmented);
clustering.extract(clusters);
int cloud_num = 0;
std::vector<pcl::PointCloud<pcl::PointXYZ>::Ptr> cloud_cluster;
std::vector<float> cloud_distance;
for (std::vector<pcl::PointIndices>::const_iterator it = clusters.begin(); it != clusters.end(); it++)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cluster(new pcl::PointCloud<pcl::PointXYZ>);
for (std::vector<int>::const_iterator i = it->indices.begin(); i != it->indices.end(); i++)
{
cluster->points.push_back(cloud_segmented->points[*i]);
}
cluster->height = 1;
cluster->width = cluster->points.size();
std::cout << "points nums of cluster" << std::to_string(cloud_num) + ": " << cluster->points.size() << std::endl;
#ifdef DEBUG
pcl::io::savePCDFile("cluster" + std::to_string(cloud_num) + ".pcd", *cluster);
#endif
cloud_num++;
cloud_cluster.push_back(cluster);
}
// /*统计学滤波*/
// pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_object_filter(new pcl::PointCloud<pcl::PointXYZRGB>);
// pcl::StatisticalOutlierRemoval<pcl::PointXYZRGB> sor;
// sor.setInputCloud(cloud_object);
// sor.setMeanK(50); //K近邻搜索点个数
// sor.setStddevMulThresh(0.5); //标准差倍数
// sor.setNegative(false); //保留未滤波点(内点)
// sor.filter(*cloud_object_filter); //保存滤波结果到cloud_filter
//
//#ifdef SAVE_CLOUD
// pcl::io::savePCDFile("cloud_object_filter.pcd", *cloud_object_filter);
//#endif
//
/*计算包围盒*/
std::vector<BoundingBox> boxes;
for (size_t i = 0; i < cloud_cluster.size(); i++)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_object(new pcl::PointCloud<pcl::PointXYZ>);
pcl::copyPointCloud(*cloud_cluster[i], *cloud_object);
//把物体投影到桌面得到底面
pcl::ProjectInliers<pcl::PointXYZ> pro;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_projected(new pcl::PointCloud<pcl::PointXYZ>);
pro.setModelType(pcl::SACMODEL_PLANE);
pro.setInputCloud(cloud_object);
pro.setModelCoefficients(plane_coefficients);
pro.filter(*cloud_projected);
#ifdef DEBUG
pcl::io::savePCDFile("cloud_projected.pcd", *cloud_projected);
#endif
pcl::transformPointCloud(*cloud_object, *cloud_object, transformation_matrix.inverse());
pcl::transformPointCloud(*cloud_projected, *cloud_projected, transformation_matrix.inverse());
//计算底面的外接矩形
pcl::MomentOfInertiaEstimation<pcl::PointXYZ> feature_extactor;
feature_extactor.setInputCloud(cloud_projected);
feature_extactor.compute();
std::vector<float> moment_of_inertia;
std::vector<float> eccentricity;
pcl::PointXYZ min_point_obb;
pcl::PointXYZ max_point_obb;
pcl::PointXYZ position_obb;
Eigen::Matrix3f roatation_maxtrix_obb;
feature_extactor.getMomentOfInertia(moment_of_inertia);
feature_extactor.getEccentricity(eccentricity);
feature_extactor.getOBB(min_point_obb, max_point_obb, position_obb, roatation_maxtrix_obb);
Eigen::Quaternionf quat(roatation_maxtrix_obb);
Eigen::Vector3f x_axis = quat.toRotationMatrix() * Eigen::Vector3f(1, 0, 0);
Eigen::Vector3f y_axis = quat.toRotationMatrix() * Eigen::Vector3f(0, 1, 0);
Eigen::Vector3f z_axis = quat.toRotationMatrix() * Eigen::Vector3f(0, 0, 1);
//将物体点云投影到z轴
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_axis(new pcl::PointCloud<pcl::PointXYZ>);
pcl::ModelCoefficients::Ptr coefficients_line(new pcl::ModelCoefficients);
coefficients_line->values.resize(6);
coefficients_line->values[0] = position_obb.x;
coefficients_line->values[1] = position_obb.y;
coefficients_line->values[2] = position_obb.z;
coefficients_line->values[3] = z_axis[0];
coefficients_line->values[4] = z_axis[1];
coefficients_line->values[5] = z_axis[2];
pro.setModelType(pcl::SACMODEL_LINE);
pro.setInputCloud(cloud_object);
pro.setModelCoefficients(coefficients_line);
pro.filter(*cloud_axis);
#ifdef DEBUG
pcl::io::savePCDFile("cloud_axis.pcd", *cloud_axis);
#endif
int top_index = -1, down_index = -1;
float top_z = std::numeric_limits <float>::min(), down_z = std::numeric_limits <float>::max();
for (size_t i = 0; i < cloud_axis->size(); i++)
{
if (cloud_axis->points[i].z > top_z)
{
top_z = cloud_axis->points[i].z;
top_index = i;
}
if (cloud_axis->points[i].z < down_z)
{
down_z = cloud_axis->points[i].z;
down_index = i;
}
}
//投影得到点云的中心作为包围盒中心
Eigen::Vector3f center;
center.x() = (cloud_axis->points[top_index].x + cloud_axis->points[down_index].x) / 2;
center.y() = (cloud_axis->points[top_index].y + cloud_axis->points[down_index].y) / 2;
center.z() = (cloud_axis->points[top_index].z + cloud_axis->points[down_index].z) / 2;
#ifdef DEBUG
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_center(new pcl::PointCloud<pcl::PointXYZ>);
cloud_center->push_back(pcl::PointXYZ(center.x(), center.y(), center.z()));
pcl::io::savePCDFile("cloud_center.pcd", *cloud_center);
#endif
BoundingBox box;
box.center = center;
box.quat = quat;
box.width = max_point_obb.x - min_point_obb.x;
box.height = max_point_obb.y - min_point_obb.y;
box.depth = pcl::euclideanDistance(cloud_axis->points[top_index], cloud_axis->points[down_index]);
std::cout << "box.width:" << box.width << " box.height:" << box.height << " box.depth:" << box.depth << std::endl;
boxes.push_back(box);
}
/*结果可视化*/
#ifdef VIEWER
pcl::visualization::PCLVisualizer viewer("viewer");
viewer.addPointCloud(cloud, "cloud");
for (size_t i = 0; i < boxes.size(); i++)
{
viewer.addCube(boxes[i].center, boxes[i].quat, boxes[i].width, boxes[i].height, boxes[i].depth, std::to_string(i));
}
viewer.setRepresentationToWireframeForAllActors();
while (!viewer.wasStopped())
{
viewer.spinOnce(100);
}
#endif
return 0;
}
可视化结果:
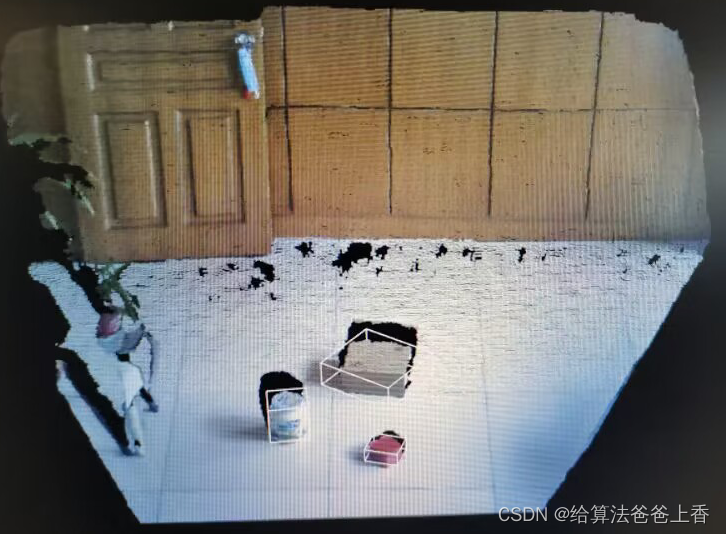
最小投影面积包围盒
具体做法如下:
- 把物体点云投影到桌面平面上得到底面投影点云;
- 计算底面投影点云点集的最小外包旋转矩形,得到物体包围盒的朝向从而建立局部坐标系;
- 将物体点云投影到局部坐标系z轴上得到投影轴线的点云;
- 投影得到点云的中心作为物体包围盒的中心;
- 通过物体包围盒的朝向和中心确定其包围盒。
#include <iostream>
#include <opencv2/opencv.hpp>
#include <Eigen/Eigenvalues>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/ModelCoefficients.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/filters/extract_indices.h>
#include <pcl/filters/project_inliers.h>
#include <pcl/filters/statistical_outlier_removal.h>
#include <pcl/sample_consensus/model_types.h>
#include <pcl/sample_consensus/method_types.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/segmentation/extract_clusters.h>
#include <pcl/features/normal_3d.h>
#include <pcl/features/moment_of_inertia_estimation.h>
#include <pcl/sample_consensus/ransac.h>
#include <pcl/sample_consensus/sac_model_plane.h>
#include <pcl/common/common.h>
#include <pcl/common/transforms.h>
#include <pcl/common/distances.h>
#include <pcl/visualization/pcl_visualizer.h>
#define DEBUG
#define VIEWER
//包围盒结构体
struct BoundingBox
{
Eigen::Vector3f center;
Eigen::Quaternionf quat;
float width;
float height;
float depth;
};
//判断点是否在四边形工作区域内
bool point_in_quadrangle(pcl::PointXYZ p, pcl::PointCloud<pcl::PointXYZ>::Ptr pts)
{
float a = (pts->points[1].x - pts->points[0].x) * (p.y - pts->points[0].y) - (pts->points[1].y - pts->points[0].y) * (p.x - pts->points[0].x);
float b = (pts->points[2].x - pts->points[1].x) * (p.y - pts->points[1].y) - (pts->points[2].y - pts->points[1].y) * (p.x - pts->points[1].x);
float c = (pts->points[3].x - pts->points[2].x) * (p.y - pts->points[2].y) - (pts->points[3].y - pts->points[2].y) * (p.x - pts->points[2].x);
float d = (pts->points[0].x - pts->points[3].x) * (p.y - pts->points[3].y) - (pts->points[0].y - pts->points[3].y) * (p.x - pts->points[3].x);
return (a > 0 && b > 0 && c > 0 && d > 0) || (a < 0 && b < 0 && c < 0 && d < 0);
}
int main(int argc, char* argv[])
{
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGB>);
pcl::io::loadPCDFile("cloud.pcd", *cloud);
if (!cloud->size())
{
std::cout << "point cloud is empty!" << std::endl;
return -1;
}
std::cout << "points nums:" << cloud->size() << std::endl;
/*体素滤波*/
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZRGB>);
pcl::VoxelGrid<pcl::PointXYZRGB> vg;
vg.setInputCloud(cloud);
vg.setLeafSize(10, 10, 10);
vg.filter(*cloud_filtered);
std::cout << "points nums after filter:" << cloud_filtered->size() << std::endl;
#ifdef DEBUG
pcl::io::savePCDFile("cloud_filtered.pcd", *cloud_filtered);
#endif
/*ransac分割地面*/
pcl::SampleConsensusModelPlane<pcl::PointXYZRGB>::Ptr model_plane(new pcl::SampleConsensusModelPlane<pcl::PointXYZRGB>(cloud_filtered));
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_plane(new pcl::PointCloud<pcl::PointXYZRGB>);
std::vector<int> inliers_indices;
Eigen::VectorXf coefficients;
pcl::RandomSampleConsensus<pcl::PointXYZRGB> ransac(model_plane);
ransac.setDistanceThreshold(10);
ransac.computeModel();
ransac.getInliers(inliers_indices);
ransac.getModelCoefficients(coefficients);
pcl::copyPointCloud(*cloud_filtered, inliers_indices, *cloud_plane);
#ifdef DEBUG
pcl::io::savePCDFile("cloud_plane.pcd", *cloud_plane);
#endif
/*裁剪工作区域*/
Eigen::Matrix3f rot = Eigen::Quaternionf::FromTwoVectors(\
Eigen::Vector3f(coefficients[0], coefficients[1], coefficients[2]), \
Eigen::Vector3f(0, 0, 1)).toRotationMatrix();
Eigen::Matrix4f transformation_matrix = Eigen::Matrix4f::Identity();
transformation_matrix.topLeftCorner(3, 3) = rot;
Eigen::MatrixXf plane_origin(4, 1), plane_transformed(4, 1);
plane_origin << coefficients[0], coefficients[1], coefficients[2], coefficients[3];
plane_transformed = transformation_matrix * plane_origin;
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_transformed(new pcl::PointCloud<pcl::PointXYZRGB>);
pcl::transformPointCloud(*cloud_filtered, *cloud_transformed, transformation_matrix);
#ifdef DEBUG
pcl::io::savePCDFile("cloud_transformed.pcd", *cloud_transformed);
#endif
pcl::PointCloud<pcl::PointXYZ>::Ptr workspace_points3d(new pcl::PointCloud<pcl::PointXYZ>);
workspace_points3d->push_back(pcl::PointXYZ(-720, 486, 1564));
workspace_points3d->push_back(pcl::PointXYZ(463, 492, 1543));
workspace_points3d->push_back(pcl::PointXYZ(427, 118, 2714));
workspace_points3d->push_back(pcl::PointXYZ(-750, 76, 2825));
pcl::transformPointCloud(*workspace_points3d, *workspace_points3d, transformation_matrix);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_workspace(new pcl::PointCloud<pcl::PointXYZ>);
for (size_t i = 0; i < cloud_transformed->size(); i++)
{
pcl::PointXYZ p(cloud_transformed->points[i].x, cloud_transformed->points[i].y, cloud_transformed->points[i].z);
if (point_in_quadrangle(p, workspace_points3d))
{
cloud_workspace->push_back(p);
}
}
if (!cloud_workspace->size())
{
std::cout << "get workspace failed!" << std::endl;
return -1;
}
#ifdef DEBUG
pcl::io::savePCDFile("cloud_workspace.pcd", *cloud_workspace);
#endif
/*目标物体分割*/
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_segmented(new pcl::PointCloud<pcl::PointXYZ>);
pcl::ModelCoefficients::Ptr plane_coefficients(new pcl::ModelCoefficients);
pcl::PointIndices::Ptr inliers(new pcl::PointIndices);
pcl::SACSegmentation<pcl::PointXYZ> seg;
seg.setOptimizeCoefficients(true);
seg.setModelType(pcl::SACMODEL_PLANE);
seg.setMethodType(pcl::SAC_RANSAC);
seg.setDistanceThreshold(20);
seg.setInputCloud(cloud_workspace);
seg.segment(*inliers, *plane_coefficients);
pcl::ExtractIndices<pcl::PointXYZ> extract;
extract.setInputCloud(cloud_workspace);
extract.setIndices(inliers);
extract.setNegative(true);
extract.filter(*cloud_segmented);
std::cout << "points nums after segment:" << cloud_segmented->size() << std::endl;
if (!cloud_segmented->size())
{
std::cout << "segment failed!" << std::endl;
return -1;
}
#ifdef DEBUG
pcl::io::savePCDFile("cloud_segmented.pcd", *cloud_segmented);
#endif
/*Euclidean聚类*/
pcl::search::KdTree<pcl::PointXYZ>::Ptr kdtree(new pcl::search::KdTree<pcl::PointXYZ>);
kdtree->setInputCloud(cloud_segmented);
pcl::EuclideanClusterExtraction<pcl::PointXYZ> clustering;
std::vector<pcl::PointIndices> clusters;
clustering.setClusterTolerance(20);
clustering.setMinClusterSize(100);
clustering.setMaxClusterSize(10000);
clustering.setSearchMethod(kdtree);
clustering.setInputCloud(cloud_segmented);
clustering.extract(clusters);
int cloud_num = 0;
std::vector<pcl::PointCloud<pcl::PointXYZ>::Ptr> cloud_cluster;
std::vector<float> cloud_distance;
for (std::vector<pcl::PointIndices>::const_iterator it = clusters.begin(); it != clusters.end(); it++)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cluster(new pcl::PointCloud<pcl::PointXYZ>);
for (std::vector<int>::const_iterator i = it->indices.begin(); i != it->indices.end(); i++)
{
cluster->points.push_back(cloud_segmented->points[*i]);
}
cluster->height = 1;
cluster->width = cluster->points.size();
std::cout << "points nums of cluster" << std::to_string(cloud_num) + ": " << cluster->points.size() << std::endl;
#ifdef DEBUG
pcl::io::savePCDFile("cluster" + std::to_string(cloud_num) + ".pcd", *cluster);
#endif
cloud_num++;
cloud_cluster.push_back(cluster);
}
/*计算包围盒*/
std::vector<BoundingBox> boxes;
for (size_t i = 0; i < cloud_cluster.size(); i++)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_object(new pcl::PointCloud<pcl::PointXYZ>);
pcl::copyPointCloud(*cloud_cluster[i], *cloud_object);
//把物体投影到桌面得到底面
pcl::ProjectInliers<pcl::PointXYZ> pro;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_projected(new pcl::PointCloud<pcl::PointXYZ>);
pro.setModelType(pcl::SACMODEL_PLANE);
pro.setInputCloud(cloud_object);
pro.setModelCoefficients(plane_coefficients);
pro.filter(*cloud_projected);
#ifdef DEBUG
pcl::io::savePCDFile("cloud_projected.pcd", *cloud_projected);
#endif
//计算点集的最小外包旋转矩形
std::vector<cv::Point2f> points;
for (size_t i = 0; i < cloud_projected->size(); i++)
{
points.push_back(cv::Point2f(cloud_projected->points[i].x, cloud_projected->points[i].y));
}
cv::RotatedRect rect = cv::minAreaRect(points);
cv::Mat vertices;
cv::boxPoints(rect, vertices);
#ifdef DEBUG
cv::Mat img(1000, 1000, CV_8UC3, cv::Scalar(255, 255, 255));
for (int i = 0; i < points.size(); ++i)
{
cv::circle(img, cv::Point(points[i].x + 500, points[i].y + 2500), 1, cv::Scalar(0, 0, 255), -1);
}
for (int i = 0; i < vertices.rows; ++i)
{
cv::Point p1 = cv::Point(vertices.at<float>(i, 0) + 500, vertices.at<float>(i, 1) + 2500);
cv::Point p2 = cv::Point(vertices.at<float>((i + 1) % 4, 0) + 500, vertices.at<float>((i + 1) % 4, 1) + 2500);
cv::line(img, p1, p2, cv::Scalar(255, 0, 0), 1);
}
cv::imwrite("RotatedRect.bmp", img);
#endif
cv::Point p0 = cv::Point(vertices.at<float>(0, 0), vertices.at<float>(0, 1));
cv::Point p1 = cv::Point(vertices.at<float>(1, 0), vertices.at<float>(1, 1));
cv::Point p2 = cv::Point(vertices.at<float>(2, 0), vertices.at<float>(2, 1));
Eigen::Vector3f rect_axis(p0.x - p1.x, p0.y - p1.y, 0);
Eigen::Matrix3f box_rot = Eigen::Quaternionf::FromTwoVectors(rect_axis, Eigen::Vector3f(1, 0, 0)).toRotationMatrix() * rot;
Eigen::Quaternionf quat(box_rot.inverse());
//将物体点云投影到z轴
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_axis(new pcl::PointCloud<pcl::PointXYZ>);
pcl::ModelCoefficients::Ptr coefficients_line(new pcl::ModelCoefficients);
coefficients_line->values.resize(6);
coefficients_line->values[0] = (p0.x + p2.x) / 2;
coefficients_line->values[1] = (p0.y + p2.y) / 2;
coefficients_line->values[2] = 0;
coefficients_line->values[3] = 0;
coefficients_line->values[4] = 0;
coefficients_line->values[5] = 1;
pro.setModelType(pcl::SACMODEL_LINE);
pro.setInputCloud(cloud_object);
pro.setModelCoefficients(coefficients_line);
pro.filter(*cloud_axis);
#ifdef DEBUG
pcl::io::savePCDFile("cloud_axis.pcd", *cloud_axis);
#endif
int top_index = -1, down_index = -1;
float top_z = std::numeric_limits <float>::min(), down_z = std::numeric_limits <float>::max();
for (size_t i = 0; i < cloud_axis->size(); i++)
{
if (cloud_axis->points[i].z > top_z)
{
top_z = cloud_axis->points[i].z;
top_index = i;
}
if (cloud_axis->points[i].z < down_z)
{
down_z = cloud_axis->points[i].z;
down_index = i;
}
}
//投影得到点云的中心作为包围盒中心
pcl::PointXYZ center;
center.x = (cloud_axis->points[top_index].x + cloud_axis->points[down_index].x) / 2;
center.y = (cloud_axis->points[top_index].y + cloud_axis->points[down_index].y) / 2;
center.z = (cloud_axis->points[top_index].z + cloud_axis->points[down_index].z) / 2;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_center(new pcl::PointCloud<pcl::PointXYZ>);
cloud_center->push_back(center);
#ifdef DEBUG
pcl::io::savePCDFile("cloud_center.pcd", *cloud_center);
#endif
pcl::transformPointCloud(*cloud_object, *cloud_object, transformation_matrix.inverse());
pcl::transformPointCloud(*cloud_projected, *cloud_projected, transformation_matrix.inverse());
pcl::transformPointCloud(*cloud_center, *cloud_center, transformation_matrix.inverse());
BoundingBox box;
box.center = cloud_center->points[0].getVector3fMap();
box.quat = quat;
box.width = cv::norm(p0 - p1);
box.height = cv::norm(p1 - p2);
box.depth = pcl::euclideanDistance(cloud_axis->points[top_index], cloud_axis->points[down_index]);
std::cout << "box.width:" << box.width << " box.height:" << box.height << " box.depth:" << box.depth << std::endl;
boxes.push_back(box);
}
/*结果可视化*/
#ifdef VIEWER
pcl::visualization::PCLVisualizer viewer("viewer");
viewer.addPointCloud(cloud, "cloud");
for (size_t i = 0; i < boxes.size(); i++)
{
viewer.addCube(boxes[i].center, boxes[i].quat, boxes[i].width, boxes[i].height, boxes[i].depth, std::to_string(i));
}
viewer.setRepresentationToWireframeForAllActors();
while (!viewer.wasStopped())
{
viewer.spinOnce(100);
}
#endif
return 0;
}
可视化结果:


![[ubuntu]ubuntu设置虚拟内存](https://img-blog.csdnimg.cn/f361ea3758bb4d9dab55d713413d60ca.jpeg)