【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
学习slam,一般就是所谓的边定位、边制图的知识。然而在实际生产过程中,比如扫地机器人、agv、巡检机器人、农业机器人,很多情况下都是先绘制好地图。等地图ok了,再规划机器人特定的路径。路径这些都没问题了之后,机器人就会按照我们的设想,去指定的地方执行指定的任务就可以了。所以,制定完地图之后,后续的任务就不再需要制图了,主要就是定位。也就是机器人在行进的过程当中不要丢位置就可以了。
在这过程中其实就衍生出一些问题,也就是学术和生产的问题。对于学术来说,slam的制图和定位常常是一起的。而工业生产中,对定位的要求可能更多一点。这中间,因为场景变化很大,我们绘制出来的地图够不够鲁棒、满足要求,这很重要。除此之外,定位标准也是有差别的。道路上精度可以差一点,但是对于具体的库位,则要求必须精准。这也是学术和工业生产不一样的地方。
在ros上面,自带了一些定位算法,这中间就有amcl。虽然amcl比较经典,但是由于计算量比较大、反馈比较慢(常常是秒级别的),工业上用反光柱可能更多一点。但是这并不妨碍我们去学习amcl这个经典算法。
1、打开仿真场景
在开始使用amcl之前,第一步,我们需要的还是打开仿真场景,即输入完source ./devel/setup.sh之后,立刻输入roslaunch wpr_simulation wpb_stage_slam.launch。
2、启动map_server
amcl除了需要接收robot的odom、laser这些数据之外,另外一个很重要的输入就是map文件。所以这个时候需要输入rosrun map_server map_server ./map.yaml。
feixiaoxing@feixiaoxing-VirtualBox:~/Desktop/catkin_ws$ rosrun map_server map_server ./map.yaml
[ INFO] [1695982052.911529758]: Loading map from image "./map.pgm"
[ INFO] [1695982053.109551903, 334.643000000]: Read a 1024 X 1024 map @ 0.025 m/cell
[ INFO] [1695982275.007835915, 449.119000000]: Sending map
3、启动amcl
amcl的启动就比较简单了,直接输入rosrun amcl amcl即可。关于amcl的参数设置,我们将来可以慢慢理解,这里全部使用默认的参数。
feixiaoxing@feixiaoxing-VirtualBox:~/Desktop/catkin_ws$ rosrun amcl amcl
[ INFO] [1695982274.997554194]: Requesting the map...
[ INFO] [1695982275.107380439]: Received a 1024 X 1024 map @ 0.025 m/pix
[ INFO] [1695982275.271526958, 449.297000000]: Initializing likelihood field model; this can take some time on large maps...
[ INFO] [1695982275.419726758, 449.388000000]: Done initializing likelihood field model.
4、启动rviz
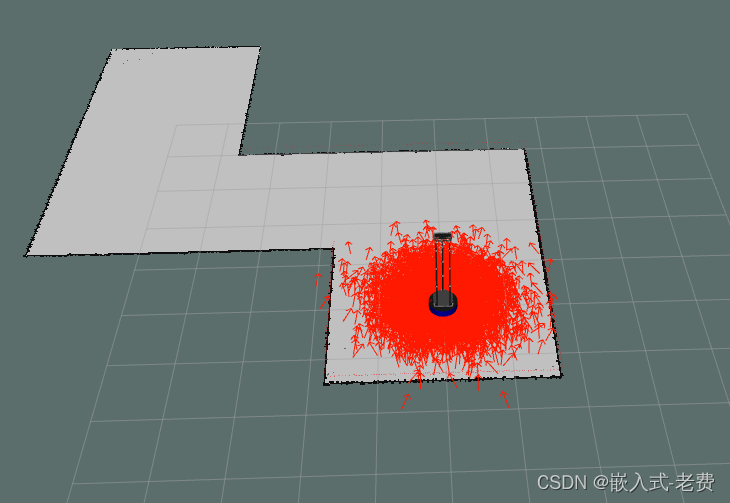
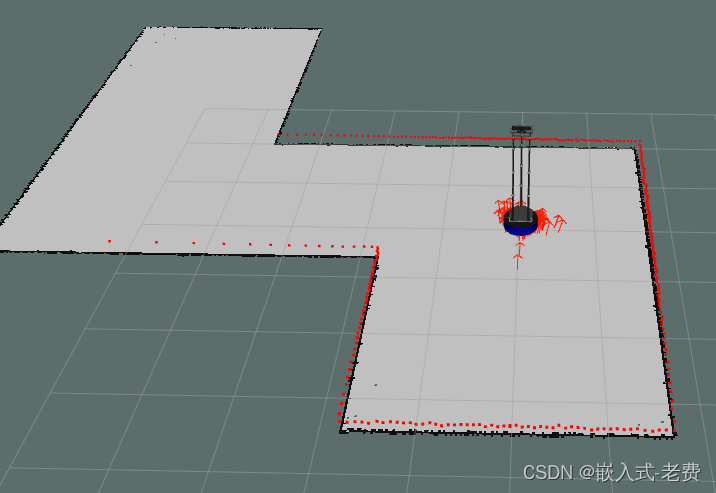
仿真环境、map_server和amcl都启动完毕之后,下面就是启动rviz了。直接输入rosrun rviz rviz即可。等rviz启动后,依次添加RobotModel、LaserScan、Map,最重要的就是还要添加PoseArray,也就是amcl生成的粒子数据。这些粒子决定了最终robot的位姿信息。
5、添加小车控制设备
为了实现对小车的控制,我们输入rosrun rqt_robot_steering rqt_robot_steering,就可以直接操纵小车移动了。随着小车的前进,大家会看到小车周围的粒子越来越集中,这也是amcl算法的特点,本身也说明了小车的位姿也是越来越准确了。
6、发布pose
前面我们通过amcl算法发现,车辆走的越远,位姿越来越稳定。这个时候,可以通过rostopic echo amcl_pose,查看小车的位姿信息,
feixiaoxing@feixiaoxing-VirtualBox:~/Desktop/catkin_ws$ rostopic echo amcl_pose
header:
seq: 5
stamp:
secs: 367
nsecs: 355000000
frame_id: "map"
pose:
pose:
position:
x: 1.829333671192329
y: -0.023028699572001186
z: 0.0
orientation:
x: 0.0
y: 0.0
z: -0.005907350114325032
w: 0.9999825514550875
covariance: [0.00653005930345163, 0.0013395990524377593, 0.0, 0.0, 0.0, 0.0, 0.0013395990524377593, 0.007374991974678432, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.002811733697012357]
---
上面position中的打印x、y、z是坐标信息,orientation中的x、y、z、w是角度信息,表示方法是四元数,如果需要看角度的话,需要进一步通过矩阵转成roll、pitch和yaw。因为机器人是运行在平面上的,所以这里的yaw就是我们希望获得的数值。至此,我们通过ros、hector slam和amcl就可以实现最最基本的slam工作了。