一、说明
在复杂而迷人的机器人世界中,行为树(BT)已成为决策过程中不可或缺的一部分。它们提供了一种结构化、模块化和高效的方法来对机器人的行为进行编程。BT起源于视频游戏行业,用于控制非玩家角色,他们在机器人领域找到了归宿,他们擅长管理无数的任务和条件。
用于机器人导航的Nav2和操作框架MoveIt等机器人软件使用行为树来处理复杂的动作和条件。
在这篇文章中,我们将探索行为树以彻底理解它们。我们将首先分解行为树的基本部分,并清楚地了解它们的工作原理。然后,我们将进入实际领域,编写代码来创建和使用行为树,独立于任何特定的平台或框架。
但我们不会止步于此。一旦我们掌握了基础知识,我们将更进一步,将我们的行为树与ROS2(机器人操作系统2)集成,ROS<>是一个用于编写机器人软件的灵活框架。这将展示如何在现实世界的机器人环境中使用行为树,增强我们自主系统的决策能力。
二、行为树的基本概念
将行为树 (BT) 视为视频游戏角色、机器人或任何其他需要决定下一步操作的自主代理的决策图。
想象一下,你正在导演一部戏剧,但你的演员是机器人。作为导演,你需要一种方法来指导你的演员,告诉他们该做什么以及什么时候做。行为树(BT)就像你的脚本,详细说明你的机器人演员需要做出的每一个动作。就像在真实的戏剧中一样,当导演叫“动作”(或者,在这种情况下,“滴答”)时,节目(或任务)就开始了。
那么,什么是“刻度”?在BT的上下文中,tick是从树的根节点(或起点)到其子节点的信号,敦促它们执行任务。节点仅在收到即时报价时“采取行动”。
现在,这个系统的美妙之处在于它的反馈机制。节点开始执行其任务后,它会使用以下三种状态之一与控制器(其父节点)通信其进度:正在运行、成功或失败。
正在运行:这种状态有点像在说,“我在上面,但我还没有完成。
成功:这相当于,“我已经尽了自己的一份力量,而且进展顺利。
失败:这就像说,“我试过了,但我做不到。
根据这些状态,导演决定将下一个即时报价发送到何处。这是一个持续到任务完成或不再有效的循环。
行为树由两种主要类型的节点组成:控制流节点和执行节点。让我们更深入地了解它们。
控制流节点就像导演的助手,他们帮助决定演员下一步应该做什么。主要有四种类型:
序列(→)节点:这就像一个严格的助手,他要求每个任务都必须完美地完成,顺序,然后才能继续下一个任务。如果任何任务失败,序列将停止并报告失败。
回退 (?节点(也称为选择器):这是一个更灵活的助手,他有一个任务列表并逐个尝试,直到一个成功。如果所有任务都失败,则回退报告失败。
并行 (⇒)节点: 这是一个可以同时处理多项任务的助手,指导多个演员同时执行他们的任务。并行节点根据一组必须成功的任务来定义其成功。
装饰器节点:这个助手有点特别,因为它只处理一个演员,但可以通过各种方式修改演员的行为。有不同种类的装饰器,每种装饰器都为任务提供了独特的转折。
执行节点是参与者,即执行任务(操作)或评估某些条件(条件)的参与者。
操作节点: 当此参与者收到勾号时,它会启动其任务,使控制器保持“正在运行”状态的更新,最后报告“成功”或“失败”。
条件节点: 这个演员更像是一个抽查者。它评估是否满足某些条件,如果条件为真,则立即报告“成功”,如果条件为假,则立即报告“失败”。
现在您已经了解了基础知识,您可以使用行为树指导您的机器人游戏。请记住,此框架旨在提高灵活性和适应性,使您的机器人参与者能够快速响应变化并执行复杂、细致入微的任务。

三、BT 的节点类型
让我们考虑一个机器人手臂上下文中的行为树,它可以捡起球并将其放置在球门位置。
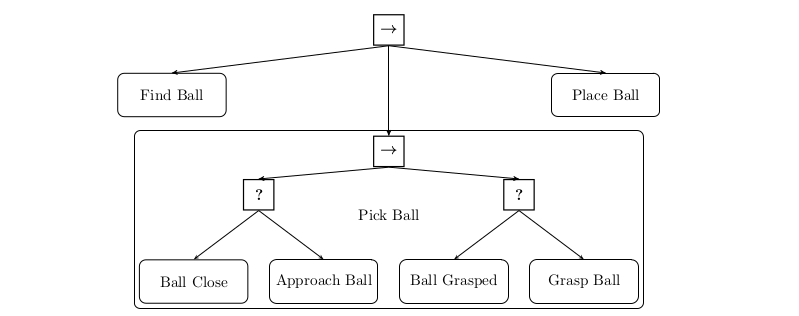
高级BT执行一项任务,包括首先找到,然后挑选并最终放置球
- BT 以序列节点作为主控制器开始。该节点对机器人有两个主要任务:“查找球”和“放置球”。
- 第一个任务“找球”涉及一个机器人,该机器人被分配来定位球。
- 第二个任务“放置一个球”更为复杂。此任务由另一个“序列”节点管理,该节点可确保按顺序执行一系列操作。此序列涉及任务“挑选球”。
- “拾球”任务由两个回退节点管理。这些节点中的每一个都有不同的方法来引导机器人。
- 第一个回退节点确保机器人检查“球是否接近”,如果是,则指示机器人“接近球”。
- 第二个回退节点负责检查“球是否被抓住”,如果没有,则指示机器人“抓住球”。
请记住,在BT中,节点仅在收到信号或“滴答”时才起作用。一旦任务启动,机器人就会将其状态传达回其父节点。循环一直持续到所有任务完成或无法完成。
到目前为止,我们已经详细讨论了行为树的概念和机制。现在,是时候将这些想法付诸行动了。
在深入研究实际编码之前,我们需要设置行为树包。在以下各节中,我们将引导您完成设置此包的过程,之后我们将探索将行为树变为现实的代码。
要在 Ubuntu 20.04 上设置并运行我们的第一个 BehaviorTree.CPP 示例,请执行以下步骤:
# Install the required dependencies:
# Open a terminal and run the following commands to install the necessary
# dependencies:
sudo apt-get update
sudo apt-get install -y libzmq3-dev libboost-dev libboost-system-dev libboost-filesystem-dev libboost-thread-dev libprotobuf-dev protobuf-compiler libmsgsl-dev libgtest-dev cmake
# Build and install BehaviorTree.CPP:
# Clone the BehaviorTree.CPP repository, build, and install the library:
git clone https://github.com/BehaviorTree/BehaviorTree.CPP.git
cd BehaviorTree.CPP
mkdir build
cd build
cmake ..
make -j$(nproc)
sudo make install让我们从使用 BehaviorTree 的简单示例开始.CPP将帮助您了解基础知识并熟悉语法。
mkdir ~/example1
cd ~/example1
touch main.cpp && touch CMakeLists.txt// main.cpp
#include <behaviortree_cpp/bt_factory.h>
#include <behaviortree_cpp/behavior_tree.h>
using namespace BT;
class SaySomething : public SyncActionNode
{
public:
SaySomething(const std::string& name, const NodeConfiguration& config)
: SyncActionNode(name, config)
{
}
static PortsList providedPorts()
{
return { InputPort<std::string>("message") };
}
NodeStatus tick() override
{
std::string message;
getInput("message", message);
std::cout << "Robot says: " << message << std::endl;
return NodeStatus::SUCCESS;
}
};
static const char* xml_text = R"(
<root>
<BehaviorTree>
<SaySomething message="Hello, World!" />
</BehaviorTree>
</root>
)";
int main()
{
BehaviorTreeFactory factory;
factory.registerNodeType<SaySomething>("SaySomething");
auto tree = factory.createTreeFromText(xml_text);
tree.tickWhileRunning();
return 0;
}# CMakeLists.txt
cmake_minimum_required(VERSION 3.5)
project(bt_example)
set(CMAKE_CXX_STANDARD 17)
find_package(behaviortree_cpp REQUIRED)
add_executable(bt_example main.cpp)
target_link_libraries(bt_example BT::behaviortree_cpp)# Now, build and run the example:
mkdir build
cd build
cmake ..
make
./bt_example太棒了,您已经获得了第一个BehaviorTree.CPP 代码片段!该脚本代表了一个基本的行为树,其中机器人(您的演员)有一个简单的任务:说些什么。让我们来分解一下:
该类扩展了该类,该类是 BehaviorTree.CPP 提供的执行节点类型之一。这是一个同步操作节点,这意味着它不返回“正在运行”状态,而只返回“成功”或“失败”。在我们的例子中,它将始终返回“成功”。SaySomethingSyncActionNodeSyncActionNode
该方法是在勾选此节点时调用的主要方法。在这里,它检索输入消息并将其输出到控制台。由于它每次都成功执行其任务,因此它会返回 .tick()NodeStatus::SUCCESS
定义为 的 XML 文本表示行为树的结构。它包含一个节点,带有消息“Hello, World!xml_textSaySomething
最后,该函数创建一个 ,注册节点类型,从 XML 文本创建树,并在树运行时勾选树。这让机器人说“你好,世界!mainBehaviorTreeFactorySaySomething
现在,有了基础知识,您就可以转向更复杂的行为树,例如拾取和放置树。在选取和放置树中,您将引入更多控制流节点和执行节点,将它们交织在一起以实现所需的行为。此处提供了此示例的完整代码。
#include <iostream>
#include <behaviortree_cpp/bt_factory.h>
#include <behaviortree_cpp/behavior_tree.h>
using namespace BT;
// Define FindBall action node
class FindBall : public BT::SyncActionNode
{
public:
FindBall(const std::string& name) : BT::SyncActionNode(name, {})
{
}
// Define the tick() function for the FindBall node
NodeStatus tick() override
{
std::cout << "[⚓ FindBall ] => \t" << this->name() << std::endl;
return BT::NodeStatus::SUCCESS;
}
};
// Define PickBall action node
class PickBall : public BT::SyncActionNode
{
public:
PickBall(const std::string& name) : BT::SyncActionNode(name, {})
{
}
// Define the tick() function for the PickBall node
NodeStatus tick() override
{
std::cout << "[⚓ PickBall ] => \t" << this->name() << std::endl;
return BT::NodeStatus::SUCCESS;
}
};
// Define PlaceBall action node
class PlaceBall : public BT::SyncActionNode
{
public:
PlaceBall(const std::string& name) : BT::SyncActionNode(name, {})
{
}
// Define the tick() function for the PlaceBall node
NodeStatus tick() override
{
std::cout << "[⚓ PlaceBall ] => \t" << this->name() << std::endl;
return BT::NodeStatus::SUCCESS;
}
};
// Define GripperInterface class for interacting with the gripper
class GripperInterface
{
private:
bool _opened;
public:
GripperInterface() : _opened(true)
{
}
NodeStatus open()
{
_opened = true;
std::cout << "GripperInterface::open" << std::endl;
return BT::NodeStatus::SUCCESS;
}
NodeStatus close()
{
std::cout << "GripperInterface::close" << std::endl;
_opened = false;
return BT::NodeStatus::SUCCESS;
}
};
// Define BallClose condition function
BT::NodeStatus BallClose()
{
std::cout << "[ Close to ball: NO ]" << std::endl;
return BT::NodeStatus::FAILURE;
}
// Define BallGrasped condition function
BT::NodeStatus BallGrasped()
{
std::cout << "[ Grasped: NO ]" << std::endl;
return BT::NodeStatus::FAILURE;
}
// Define the behavior tree structure in XML format
static const char* xml_text = R"(
<root main_tree_to_execute = "MainTree" >
<BehaviorTree ID="MainTree">
<Sequence name="root_sequence">
<FindBall name="found_ok"/>
<Sequence>
<Fallback>
<BallClose name="no_ball"/>
<PickBall name="approach_ball"/>
</Fallback>
<Fallback>
<BallGrasped name="no_grasp"/>
<GraspBall name="grasp_ball"/>
</Fallback>
</Sequence>
<PlaceBall name="ball_placed"/>
</Sequence>
</BehaviorTree>
</root>
)";
int main()
{
BehaviorTreeFactory factory;
// Register custom action nodes with the factory
factory.registerNodeType<FindBall>("FindBall");
factory.registerNodeType<PickBall>("PickBall");
factory.registerNodeType<PlaceBall>("PlaceBall");
// Register custom condition nodes with the factory
factory.registerSimpleCondition("BallClose", std::bind(BallClose));
factory.registerSimpleCondition("BallGrasped", std::bind(BallGrasped));
// Create an instance of GripperInterface
GripperInterface gripper;
// Register a simple action node using the GripperInterface instance
factory.registerSimpleAction("GraspBall", std::bind(&GripperInterface::close, &gripper));
// Create the behavior tree using the XML description
auto tree = factory.createTreeFromText(xml_text);
// Run the behavior tree until it finishes
tree.tickWhileRunning();
return 0;
}# Output
[⚓ FindBall ] => found_ok
[ Close to ball: NO ]
[⚓ PickBall ] => approach_ball
[ Grasped: NO ]
GripperInterface::close
[⚓ PlaceBall ] => cube_placed太好了,您创建了一个更复杂的行为树!此脚本表示机器人的拾取和放置操作,由查找、拾取和放置球组成。让我们剖析一下:
- 您已经创建了三个操作节点:、 和 。这些类中的每一个都扩展并实现函数,该函数记录操作的名称并返回 .
FindBallPickBallPlaceBallSyncActionNodetick()NodeStatus::SUCCESS - 您已经定义了一个类,该类表示机器人的抓手。它可以打开和关闭夹持器,两个操作返回。
GripperInterfaceNodeStatus::SUCCESS - 您已经定义了两个条件函数:和 。这些功能表示机器人在捡球之前需要进行的检查。他们目前总是返回,模拟球没有接近并且机器人还没有抓住球的场景。
BallCloseBallGraspedNodeStatus::FAILURE - XML 字符串定义行为树。它从一个序列节点开始,该节点首先尝试找到球 ()。找到球后,它会尝试拾取球,这是由两个回退节点组成的另一个序列节点。第一个回退节点检查球是否接近 (),如果没有,机器人将接近球 ()。第二个回退节点检查球是否被抓住(),如果没有,机器人会抓住球()。一旦球被捡起,机器人就会放置球()。
xml_textFindBallBallClosePickBallBallGraspedGraspBallPlaceBall - 最后,该函数注册自定义操作和条件节点,创建 的实例,使用 注册操作,从 XML 文本创建树,并在树运行时勾选树。
mainGripperInterfaceGraspBallGripperInterface
此代码提供了机器人如何使用行为树执行一系列任务的实际演示,并在此过程中进行检查。但是,请注意,当前条件始终返回 。为了使此示例更加逼真,您可能需要根据机器人的实际状态及其环境更新这些条件。NodeStatus::FAILURE
这是这篇文章的总结!您已经了解了行为树、其结构和组件,甚至使用拾取和放置示例实现了复杂的树。
请继续关注我们的下一篇文章,我们将把事情提升一个档次。我们将介绍 ROS2(机器人操作系统 2)与行为树的集成,为您的机器人应用程序创建复杂、健壮和自适应行为开辟更多可能性。下一篇文章见!
我希望这些信息对您有所帮助,并且您发现它很有用。如果您有任何问题或意见,请随时告诉我。感谢您的反馈,并很乐意帮助回答您可能遇到的任何问题。感谢您抽出宝贵时间阅读本文。
我总是在LinkedIn上分享有趣的文章和更新,所以如果您想随时了解情况,请随时在平台上关注我。杰加特桑·尚穆甘
参考资料:
1.行为树官方文档
2.机器人和人工智能中的行为树:简介
3.导航2行为树
Nav2 Behavior Trees — Nav2 1.0.0 documentation (ros.org)