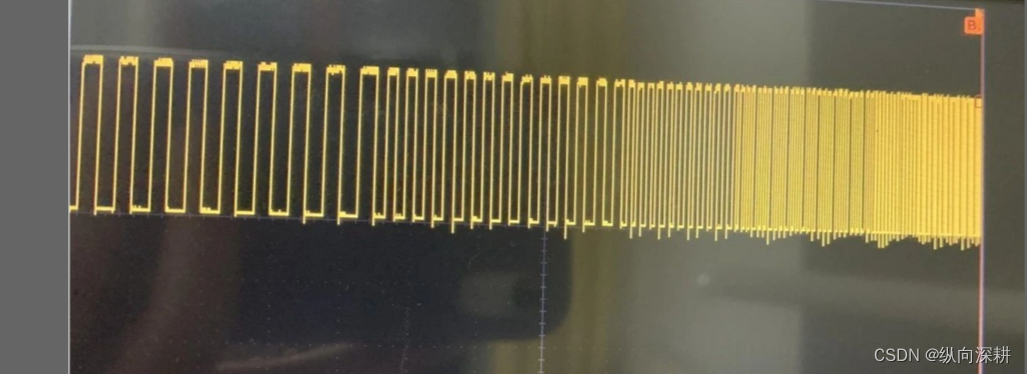
S曲线主要实现低速扭力大,更快更稳
https://zhuanlan.zhihu.com/p/396648926?utm_campaign=&utm_medium=social&utm_oi=1361101006265331712&utm_psn=1686906450235133952&utm_source=zhihu
可点击上面链接查看啤酒杯的运动动画
摘自一段知乎上一段关于S曲线方程的解释
首先说一下什么是S型曲线加速,为什么要S型曲线加速。S型曲线加速是指步进电机的启动速度按照S型曲线逐渐增加,以达到设定的最大速度。具体的S型曲线方程如下:

x取值-5~5的曲线图如下:
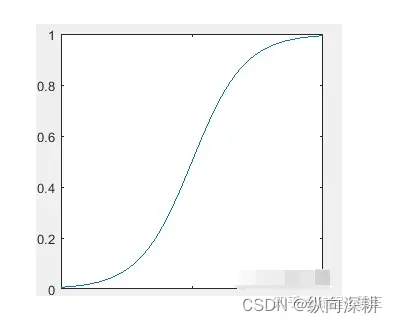
可以看到,刚开始加速和达到最大速度时加速比较缓慢,中间加速比较快。电机的转矩和转速的乘积的k倍等于功率,也就是说,功率一定的时候,转速与转矩成反比关系。所以,转速越低,转矩越大。当电机直接高速启动时,电机可能存在震动、丢步甚至启动不起来的情况。因此需要S型曲线加速,使电机能够缓慢启动。
程序实现控制电机的速度,其实就是控制PWM的输出频率。首先需要对S曲线方程进行一些变化,如下:
Fcurrent = Fmin + (Fmax-Fmin)/(1+exp( -Flexible(i - num )/num) )
Fcurrent为计算出的当前频率。
Fmin为加速的起始频率。
Fmax为加速的最大频率。
-Flexible*(i - num)/num是对S型曲线进行拉伸变化,其中Flexible代表S曲线区间(越大代表压缩的最厉害,中间加速度越大;越小越接近匀加速。理想的S曲线的取值为4-6)。
i是在循环计算过程中的索引,从0开始。
num为 加速脉冲数/2 大小。
S曲线加减算法计算
/*加速曲线计算*/
for (i = 0; i < Motor_S_Type_ARRAY.step_accel; i++)
{
// F_current = F_min + (F_max - F_min) / (1 + exp(-flexible*(i-num)/num));
F_current = (float)(Motor_S_Type_ARRAY.speed_min_frq +
(Motor_S_Type_ARRAY.speed_max_frq - Motor_S_Type_ARRAY.speed_min_frq)
/ (1 + exp(-FLEXIBLE*(i - (float)(Motor_S_Type_ARRAY.step_accel/2))
/ (Motor_S_Type_ARRAY.step_accel/2))));
speed_per = 1000000 / (F_current*2);//定时器分频后1M的频率,除以当前电平翻转的频率得重装载值。电平翻转的频率为电机频率的2倍
MotorDataAlgorithm_Struct_Array.accel_array[i] = (uint16_t)speed_per;
}
/*减速曲线计算*/
for (i = 0; i < Motor_S_Type_ARRAY.step_decel; i++)
{
// F_current = F_max - (F_max - F_min) / (1 + exp(-flexible*(i-num)/num));
F_current = (float)(Motor_S_Type_ARRAY.speed_max_frq -
(Motor_S_Type_ARRAY.speed_max_frq - Motor_S_Type_ARRAY.speed_min_frq)
/ (1 + exp(-FLEXIBLE*(i - (float)(Motor_S_Type_ARRAY.step_decel/2))
/ (Motor_S_Type_ARRAY.step_decel/2))));
speed_per = 1000000 / (F_current*2);//定时器分频后1M的频率,除以当前电平翻转的频率得重装载值。电平翻转的频率为电机频率的2倍
MotorDataAlgorithm_Struct_Array.decel_array[i] = (uint16_t)speed_per;
}
程序设定的最小频率是2000,最大脉冲翻转频率根据需要设定,由于S曲线的计算需要占用比较多的时间,需要在电机运转前计算好存放于一个数组,提供给定时器中断服务程序使用。
void motor_prog(void)
{
static uint8_t i=0,j=0;
MA_STEP_LEVEL = !MA_STEP_LEVEL;
Motor_S_Type_ARRAY.step_counter ++;
if(Motor_S_Type_ARRAY.step_counter < Motor_S_Type_ARRAY.step_num)//还没达到最大步数,即还没运行完
{
if(Motor_S_Type_ARRAY.step_counter < Motor_S_Type_ARRAY.step_accel*ACCEL_DECEL_MULTIPLE)//加速过程中
{
i++;
if(i==ACCEL_DECEL_MULTIPLE)
{
i=0;
MotorTimArrUpdate(*MA_accel_data_p++);
}
}
else if(Motor_S_Type_ARRAY.step_counter == Motor_S_Type_ARRAY.step_accel)//刚好加速完成
{
MotorTimArrUpdate(Motor_S_Type_ARRAY.step_per);
}
else if((Motor_S_Type_ARRAY.step_num - Motor_S_Type_ARRAY.step_counter) //减速过程中
< Motor_S_Type_ARRAY.step_decel*ACCEL_DECEL_MULTIPLE)
{
j++;
if(j==ACCEL_DECEL_MULTIPLE)
{
j=0;
MotorTimArrUpdate(*MA_decel_data_p++);
}
}
MotorStartStopClk(ENABLE);//启动定时器
}
if(Motor_S_Type_ARRAY.step_counter >= Motor_S_Type_ARRAY.step_num){//已达到最大步数
MotorHalfCurrent(HalfEn);//半流锁开启
MotorStartStopClk(DISABLE);//关闭定时器
Motor_S_Type_ARRAY.run_state = STOP;//运行状态为停止
/*电机位置信息更新*/
if(Motor_S_Type_ARRAY.motor_dir != config_get_ptr()->rst_dir)
{
if( Location_Last + Motor_S_Type_ARRAY.step_counter/2 < MOTOR_LIMIT )
Location_Last = Location_Last + Motor_S_Type_ARRAY.step_counter/2;
else
Location_Last = MOTOR_LIMIT;
}
else
{
if( Location_Last > Motor_S_Type_ARRAY.step_counter/2 )
Location_Last = Location_Last - Motor_S_Type_ARRAY.step_counter/2;
else
Location_Last = 0;
}
}
}
计算完成后的S曲线交由给中断服务程序处理,主要实现设置定时器重载值与实现IO翻转实现产生PWM