目录
- 0 专栏介绍
- 1 点云地图的局限性
- 2 八叉树基本原理
- 3 Octovis可视化
- 4 点云转化octomap
- 5 ROS Rviz可视化
0 专栏介绍
🔥附C++/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。
🚀详情:图解自动驾驶中的运动规划(Motion Planning),附几十种规划算法
1 点云地图的局限性

在提到八叉树的概念前,先简要介绍点云图在三维导航问题中的局限性
- 数据量大:三维点云地图通常包含大量的点数据,对存储能力提出了较高的要求;
- 实时性差:点云地图的构建和更新需要时间,无法实时地反映环境的变化。在动态环境下,实时性差可能导致导航算法无法准确感知障碍物的位置和形状;
- 处理复杂性高:点云地图的处理和匹配算法相对复杂,需要耗费大量计算资源才能进行高精度的定位和导航;
- 数据密度不均匀:点云地图中的点分布并不均匀,有些区域可能较为稀疏,而其他区域则可能过于密集。这种不均匀性会导致导航算法在某些区域难以准确感知环境,影响导航的可靠性和精度;
- …
类似于二维平面中栅格地图的概念,我们在三维空间中引入八叉树
2 八叉树基本原理
八叉树(Octree)将三维空间建模为一个立方体,不断将其分成同等大小的八个子立方体直至达到建模的最高精度,在数据结构层面表达为八叉树,如图所示。
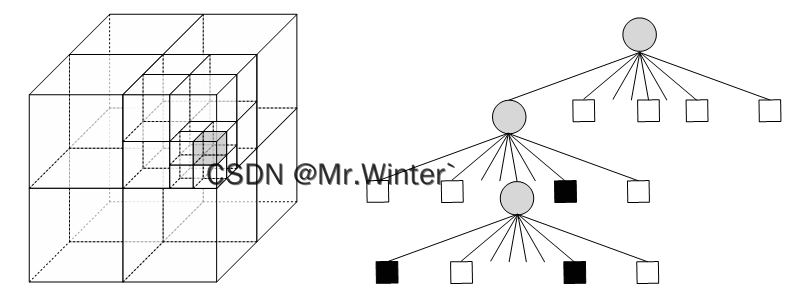
八叉树的叶子节点是对三维空间的最小建模单位,称为体素(Voxel),因此八叉树支持分辨率调节。八叉树的占据概率更新与栅格地图相同,详见地图结构 | 图解占据栅格地图原理(附Matlab建图实验)
八叉树的每个体素亦有三种状态:
- 占据
- 空闲
- 未知
当树结构某个节点的所有子节点都是同一状态时,可以只存储该节点信息而剪去其子节点,实现八叉树压缩以节省内存。此外,八叉树在地图拼接、更新也比点云地图更有优势。
接下来从代码层面更深入地理解八叉树是什么结构。
3 Octovis可视化
首先安装octomap包
git clone https://github.com/OctoMap/octomap
并编译安装
cd octomap
mkdir build
cd build
cmake ..
make
接着使用octovis工具进行可视化
bin/octovis octomap/share/data/geb079.bt
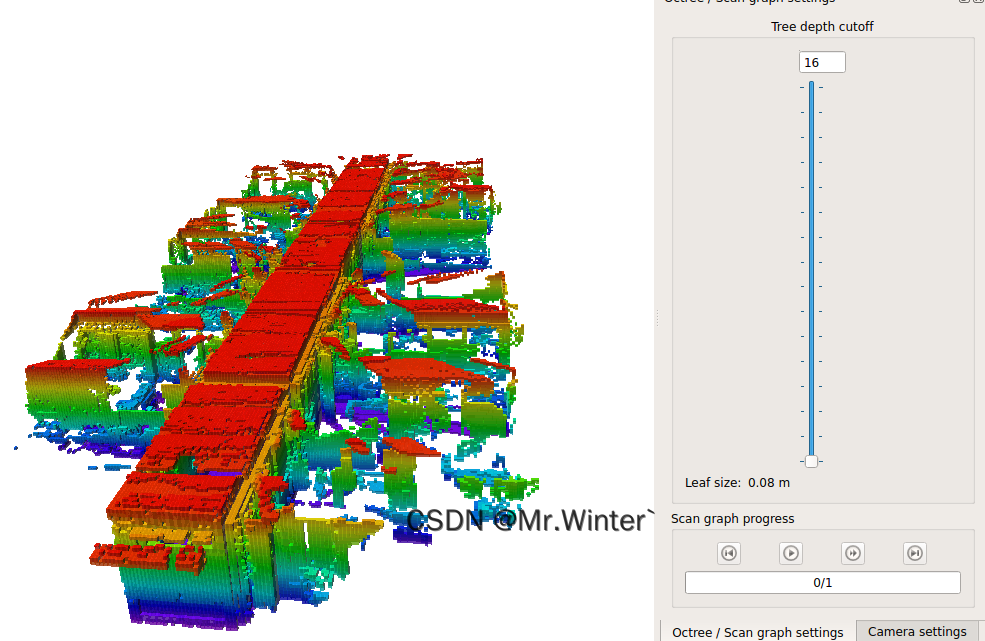
右边的拉条用来调节八叉树分辨率,如下所示(从左往右分别是0.08、0.32、0.64 m m m),这就是八叉树比点云图方便的地方之一



4 点云转化octomap
点云转化为八叉树的原理是,提取点云坐标,接着在八叉树中更新相应位置的节点,核心代码如下
// 从pcd中提取点云
pcl::PointCloud<pcl::PointXYZRGBA> cloud;
pcl::io::loadPCDFile<pcl::PointXYZRGBA> (input_file, cloud);
// 创建八叉树对象,参数为分辨率
octomap::OcTree tree(0.05);
// 用点云更新八叉树
for (auto p:cloud.points)
tree.updateNode( octomap::point3d(p.x, p.y, p.z), true );
tree.updateInnerOccupancy();
// 存储八叉树
tree.writeBinary( output_file );
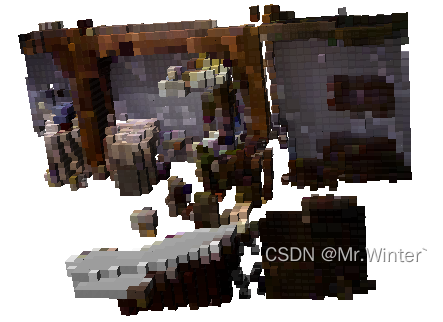
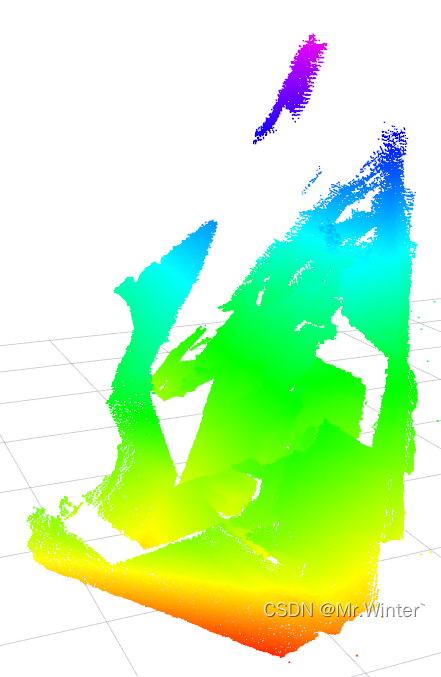
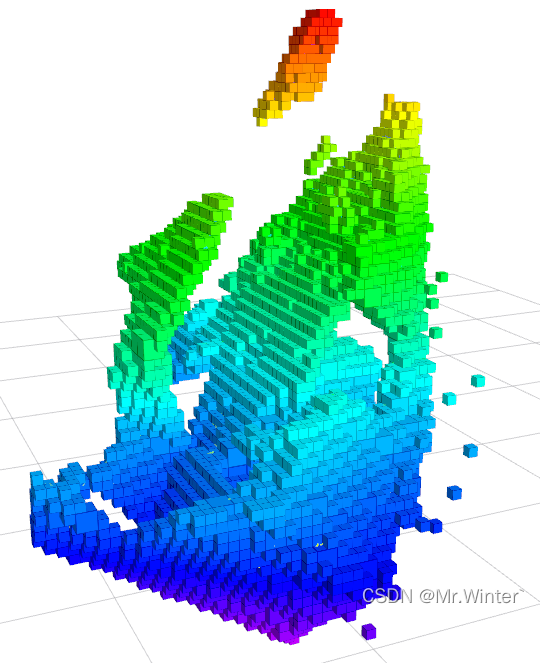
转化结果如下所示
- 点云:
pcl_viewer data/sample.pcd

- 八叉树:
bin/pcd2octomap data/sample.pcd data/test.bt octovis data/test.bt

如果想保留点云中的色彩信息,就创建带颜色的八叉树
pcl::PointCloud<pcl::PointXYZRGBA> cloud;
pcl::io::loadPCDFile<pcl::PointXYZRGBA> (input_file, cloud);
// 创建带颜色的八叉树对象,参数为分辨率
octomap::ColorOcTree tree(0.05);
// 用点云更新八叉树
for (auto p:cloud.points)
tree.updateNode( octomap::point3d(p.x, p.y, p.z), true );
// 设置颜色
for (auto p:cloud.points)
tree.integrateNodeColor( p.x, p.y, p.z, p.r, p.g, p.b );
tree.updateInnerOccupancy();
// 存储octomap, 注意要存成.ot文件而非.bt文件
tree.write(output_file);
5 ROS Rviz可视化
Rviz可视化八叉树的整体流程很简单:
- 数据源发布点云数据
octomap_server接收点云数据并转化为八叉树- Rviz可视化八叉树
发布点云数据采用以下节点
int main(int argc, char **argv)
{
std::string pcd_path, frame_id, topic;
int hz;
ros::init(argc, argv, "publish_point_cloud");
ros::NodeHandle nh("~");
nh.param<std::string>("pcd_path", pcd_path, "test.pcd");
nh.param<std::string>("frame_id", frame_id, "camera");
nh.param<std::string>("topic", topic, "/point_cloud/output");
nh.param<int>("hz", hz, 5);
ros::Publisher pcl_pub = nh.advertise<sensor_msgs::PointCloud2>(topic, 10);
pcl::PointCloud<pcl::PointXYZ> cloud;
sensor_msgs::PointCloud2 output;
pcl::io::loadPCDFile(pcd_path, cloud);
pcl::toROSMsg(cloud, output);
output.header.stamp = ros::Time::now();
output.header.frame_id = frame_id;
ros::Rate loop_rate(hz);
while (ros::ok())
{
pcl_pub.publish(output);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
可以在Rviz中先可视化点云,订阅/point_cloud/output话题即可
接着将点云数据映射到octomap_server的点云输入接口
<node pkg="octomap_server" type="octomap_server_node" name="octomap_server">
<!-- resolution in meters per pixel -->
<param name="resolution" value="0.05" />
<!-- name of the fixed frame, needs to be "/map" for SLAM -->
<param name="frame_id" type="string" value="camera" />
<!-- max range / depth resolution of the kinect in meter -->
<param name="sensor_model/max_range" value="100.0" />
<param name="latch" value="true" />
<!-- max/min height for occupancy map, should be in meters -->
<param name="pointcloud_max_z" value="1000" />
<param name="pointcloud_min_z" value="0" />
<!-- topic from where pointcloud2 messages are subscribed -->
<remap from="/cloud_in" to="/point_cloud/output" />
</node>
接着即可在Rviz中可视化八叉树
八叉树可视化工具用的是官方插件,Rviz插件的使用参考ROS从入门到精通2-4:Rviz插件制作案例(以多点导航插件为例)
完整工程代码请联系下方博主名片获取
🔥 更多精彩专栏:
- 《ROS从入门到精通》
- 《Pytorch深度学习实战》
- 《机器学习强基计划》
- 《运动规划实战精讲》
- …