摘要
近年来,电动垂直起降(eVTOL)飞行器在城市空运中得到快速发展。本文介绍了近5年来世界范围内主要的在研电动垂直起降飞行器项目,从飞行器布局形式、总体设计参数、推进系统类型、飞行控制等级等方面进行了归纳和总结,分析了不同构型下相应电动垂直起降飞行器的主要特点,辨识了电动垂直起降飞行器作为一类特殊飞行器在产品实现过程中涵盖的主要关键技术,提出了电动垂直起降飞行器未来的发展路线,并指出了其商业化发展所面临的主要挑战。
近年来,随着航空电机、电池、电传飞控、复合材料结构等关键技术的快速发展,电动垂直起降(electric Vertical Take-Off and Landing,eVTOL)飞行器因其自身特点在城市空中交通(UAM)领域正迎来革命性的发展,其主要用于城市短距离空中旅客与货物运输,可有效缓解交通堵塞,减少交通时间,降低大气污染。
eVTOL 区别于常规飞行器的主要技术特征有:(1)可实现垂直起降;(2)采用分布式推进;(3)运用全电/混合动力技术。与常规直升机相比,eVTOL 的显著优势包括:低碳环保、噪声低(采用电动推进)、自动化等级高(多为自主飞行)、运行成本低(简化了结构及维修成本)、高安全性和可靠性。因此,eVTOL 被看作是最具发展前景的、可作为城市空中交通运输这个大众市场的有效运载工具,近几年来得到迅猛发展。
eVTOL发展现状分析
一、eVTOL分类
根据垂直飞行协会(VFS)的统计,截至2020年2月,世界范围内共有253 个eVTOL 项目,将近188 个eVTOL 厂家[7]。根据eVTOL News 网站(VFS 主办)的分类,eVTOL重点分为以下三类。
(1)矢量推力型(Tilt-X):在不同使用阶段,通过改变推力方向,实现垂直起降和巡航。典型的例子如Lilium-Jet、Joby-S4等,该类eVTOL数量达到97个;
(2)升力+巡航型(Lift+Cruise):升力和巡航用的螺旋桨是独立的,分别实现垂直起降和巡航。典型的例子如Boeing-PAV、Wisk-Cora等,该类eVTOL数量达到97个;
(3)多旋翼型(Multi-copters):无巡航用螺旋桨,完全通过控制多旋翼的升力大小实现飞行。典型的例子如Ehang-216、Volocity、LIFT-Hexa 等,该类eVTOL 数量达到119个(其中含46个单人可悬停飞行器、19个电动旋翼机)。
总的来看,三种类型的eVTOL 数量大体相当,均达到30%以上,其中多旋翼型占比接近40%。
二、典型矢量推力型eVTOL分析
1、 A3(Airbus)-Vahana
Vahana 是由空客公司硅谷创新中心(A3)于2016 年初启动的研究项目,原型机在2018 年1 月31 日实现首飞,此后进行了一系列的验证测试。仅在2019年,就测试飞行达130 多次,累计飞行将近14h,最远飞行距离将近50km,单次最长飞行时间将近20min。Vahana 原型机如图1 所示。Vahana主要特性信息见表1。
表1 Vahana主要特性信息
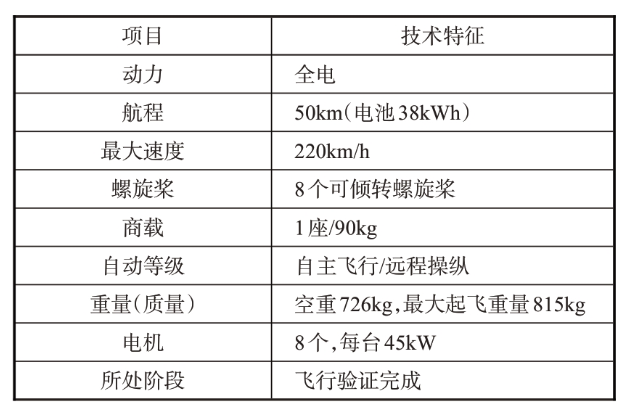
图1 Vahana原型机

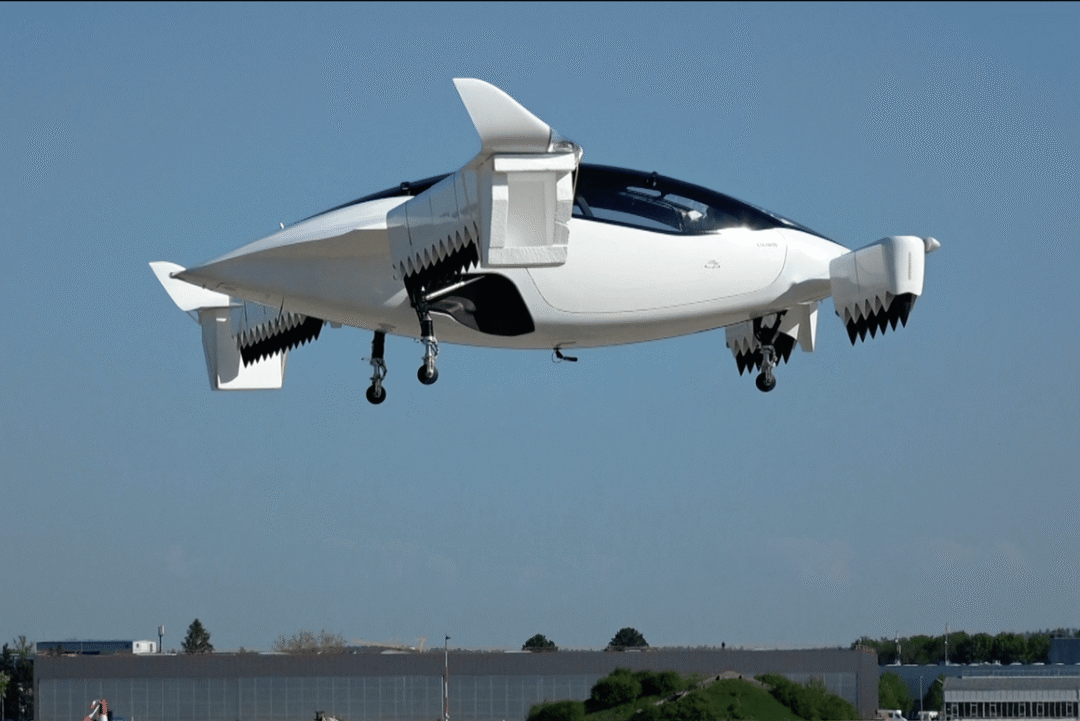
2、Lilium-Jet
Jet由位于德国慕尼黑的Lilium公司研制,是一型电动5 座垂直起降飞行器,其机翼上共布置12 个可垂直偏转的襟翼,每片襟翼上集成三个喷气电动机。与传统设计相比,Jet无需齿轮箱、螺旋桨和冷却装置。原型机已于2019年5月首飞,计划2025 年投入市场。Jet 原型机如图2 所示,Jet主要特性信息见表2。
表2 Jet主要特性信息
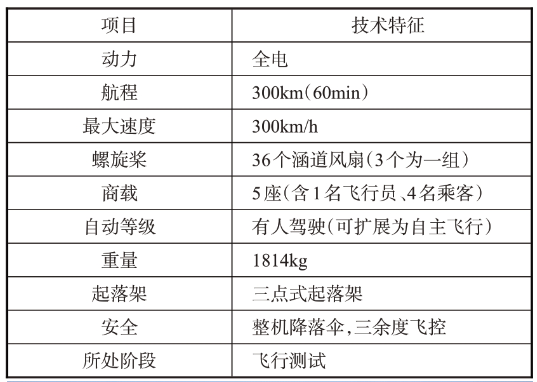
图2 Jet原型机
3、Bell-Nexus/6HX
Bell公司在2019年度国际消费类电子博览会上公开了Nexus/6HX。该飞行器采用混合电推进,航程可达240km,主要用于城际空运。该项目的研制联合了Moog、Thales、EPS、Safran、Garmin 等全球知名供应商。Nexus/6HX 原型机如图3所示,Nexus/6HX主要特性信息见表3。
表3 Nexus/6HX主要特性信息
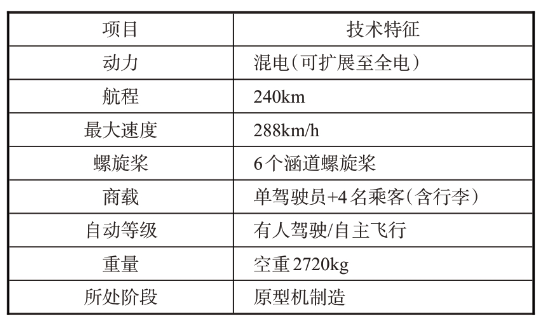
图3 Nexus/6HX原型

4、Joby-S4
美国Joby Aviation公司主要生产用于快速、安静、廉价空中出租车服务的全电动垂直起降(eVTOL)飞行器。S4原型机已于2018年2月实现首飞,计划2022年取得美国联邦航空局(FAA)适航证,并于2023年进入商用。S4原型机如图4所示,S4主要特性信息见表4。
表4 S4主要特性信息
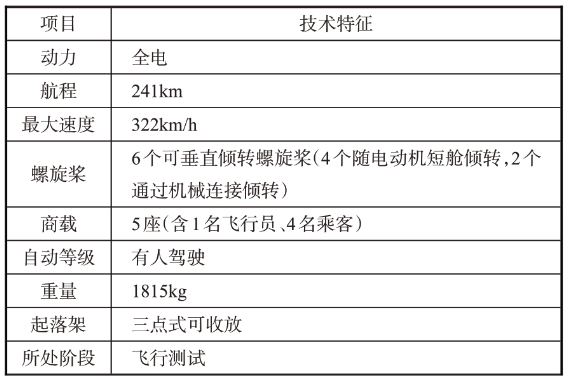
图4 S4原型机

三、典型升力+巡航型eVTOL分析
1、Boeing-PAV
PAV飞行器由美国Aurora Flight Sciences公司开发,于2017 年11 月被波音公司收购。PAV 飞行器采用升力螺旋桨实现垂直起降,利用尾部推进螺旋桨实现向前飞行。该飞行器于2019年1月22日实现首飞。PAV原型机如图5所示,PAV主要特性信息见表5。
表5 PAV主要特性信息
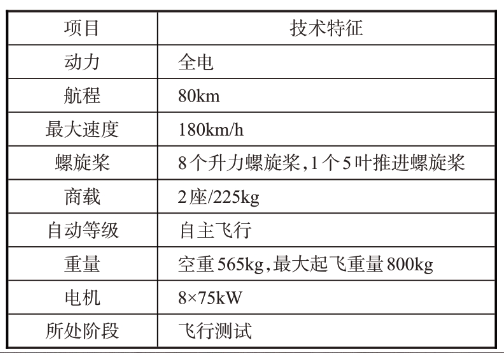
图5 PAV原型机

2、Wisk-Cora
Cora 由美国Wisk 公司(由Beoing 公司和KittyHawk 公司合资成立)研制,并获得了Google 公司合伙人拉里佩奇的融资。Cora 原型机于2018 年3 月13 日实现首飞。Cora原型机如图6所示,Cora主要特性信息见表6。
表6 Cora主要特性信息
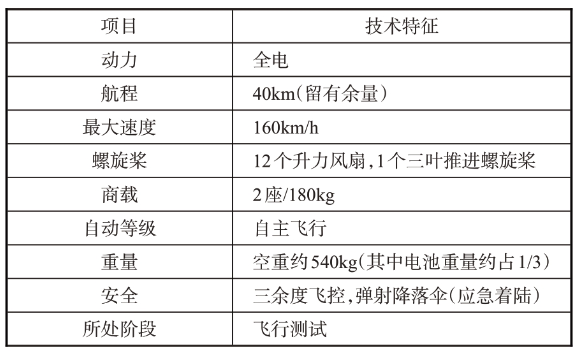
图6 Cora原型机

四、典型多旋翼型eVTOL飞行器分析
1、Airbus-CityAirbus
CityAirbus 验证机是空客公司于2015 年启动的,专为城市空中交通而设计的多乘员、自主无人驾驶的电动垂直起降飞行器。CityAirbus 验证机于2018 年开展地面测试,2019年5月实现无人首飞,计划2023年完成取证并投向市场。CityAirbus 原型机如图7 所示,CityAirbus 主要特性信息见表7。
表7 CityAirbus主要特性信息
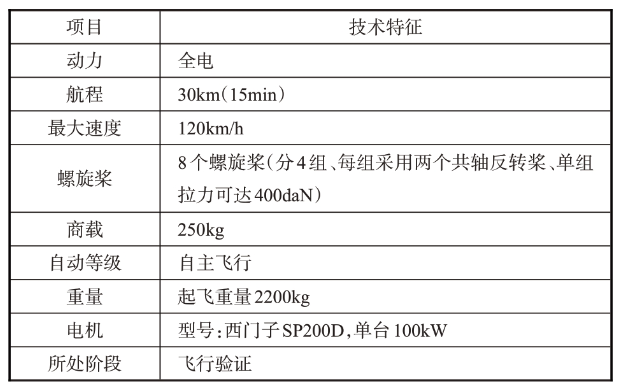
图7 CityAirbus原型机

2、EHang-216
EHang-216由位于广州的亿航智能公司于2018年2月发布,已在美国、荷兰、卡塔尔等国以及中国的广州、烟台等地进行过多次无人及有人飞行,并获得了美国联邦航空局、挪威民航局、中国民用航空局、加拿大交通部4个国家航空监管机构颁发的特许飞行运行许可证。Ehang-216 原型机如图8所示,EHang-216主要特性信息见表8。
表8 EHang-216主要特性信息
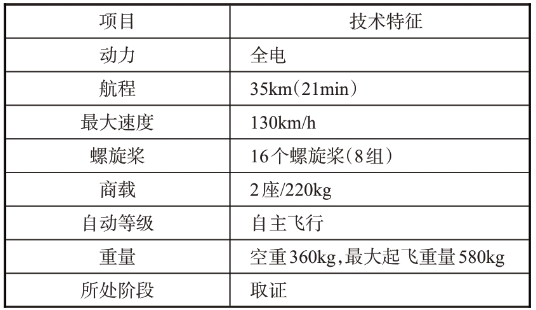
图8 EHang-216原型机

3、Volocopter-VoloCity
德国VoloCity是当今世界上最引人注目的电动垂直起降飞行器之一,它拥有18个螺旋桨,全部呈圆形对称布局。自2011起,已累计完成超过1000次的飞行测试。该型产品计划按照欧洲航空安全局(EASA)于2019年发布的垂直起降飞行器专用技术条件(SC-VTOL)取证,类别为增强型(Enhanced)。VoloCity 原型机如图9 所示,VoloCity 主要特性信息见表9。
表9 VoloCity主要特性信息
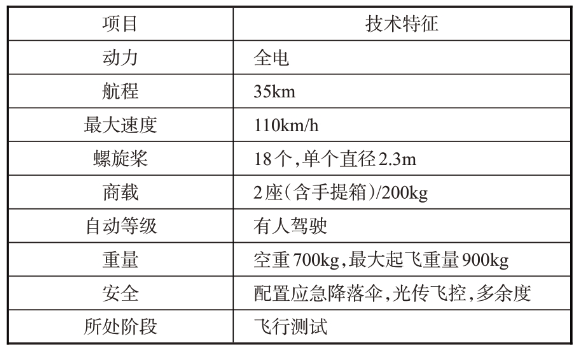
图9 VoloCity原型机

4、Lift-Hexa
Hexa由美国Lift Aircraft公司完成研制,该产品于2018年5 月进行首次飞行测试,同年11 月完成有人飞行。产品按FAA 的Powered Ultralight 类型取证,因而无需飞行员驾照。Hexa 原型机如图10 所示,Hexa 主要特性信息见表10。
表10 Hexa主要特性列表信息
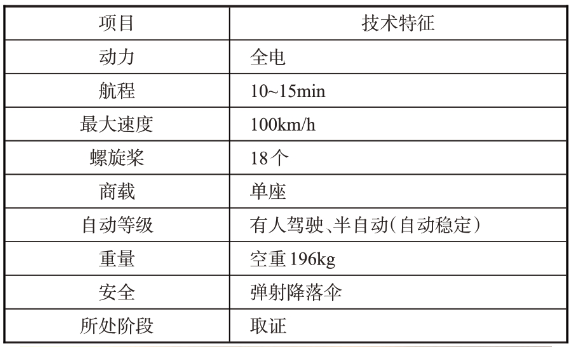
图10 Hexa原型机

五、不同类型eVTOL特点分析
从上述eVTOL飞行器信息来看,不同类别的eVTOL飞行器实现难易程度、飞行速度、航程和应用场景都有所不同。
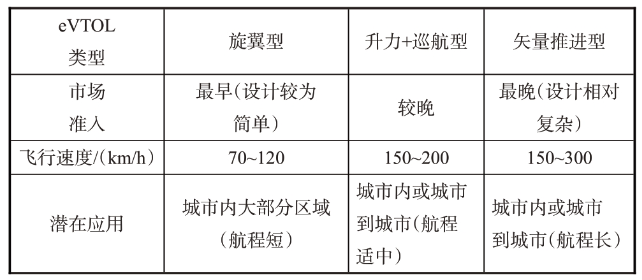
(1)多旋翼型(Multi-copters)eVTOL 飞行器包含三个以上(含)的旋翼,通过调节转速实现飞行控制,悬停飞行性能较好。由于飞行过程中并没有采用气动力,因而其设计较为简单,但飞行速度慢、载荷小、航程短,仅适用城市内短距离空运。
(2)矢量推进型(Tilt-X)eVTOL 飞行器采用相同的推进装置,以可倾转的方式兼顾悬停和巡航,在不同飞行阶段采用不同的推进方式并存在过渡过程,因而增加了总体设计的复杂性。但是矢量推进型(Tilt-X)可实现更高的飞行速度和更远的航程。
(3)升力与巡航复合型(Lift+Cruise)eVTOL 飞行器融合了固定翼和旋翼飞行器的特征,机翼的设计有利于提升航程,旋翼则便于实现垂直起降。其推进装置各不相同、分开设计,总体性能介于多旋翼型和矢量推进型之间。三种构型的综合对比见表11。
表11 三种构型的综合对比
关键技术分析
一、总体构型选择与多学科设计优化技术
eVTOL 总体上存在上述三种布局形式:多旋翼型、矢量推进型、升力与巡航复合型,且为了提升飞行器综合性能,降低噪声水平,提高安全性,普遍采用了分布式电推进设计技术,使得eVTOL的设计与传统飞行器设计思路完全不同。结合任务使命和性能需求,在方案设计初期需要开展总体构型上的权衡分析及参数设计;综合考虑气动、结构、能源、电机及螺旋桨、适航等设计因素,以提升有效载荷,降低运营成本,确保飞行安全为目标,开展多学科分析与优化设计实现气动、结构、推进、飞控和性能的最佳优化组合。
二、自主飞行控制技术
eVTOL 的商业化前景很大程度上取决于无人驾驶技术的发展。一方面,对于座位数有限的eVTOL 来说,配置驾驶员会显著降低运营经济性;另一方面,eVTOL 驾驶员培训和执照管理也显著影响其商业化进程。因而eVTOL需要实现自主飞行控制,其主要研究内容包括:(1)冗余、多功能操纵面的控制分配与重构;(2)基于人工智能的自主飞行控制和应急着陆控制。其难点主要表现在其飞行区域(以城市上空为主)相对常规飞行器而言约束更多、对自动驾驶的等级要求也更高。
三、态势感知与避障技术
由于eVTOL多是在人口密集、环境复杂的城市上空运营,在此飞行区域实现快速、安全自主飞行,其感知并规避周围危险的能力显得尤为重要,主要包括空间复杂环境下的多障碍物探测(如鸟、无人机、电塔等)和分类、障碍物定位及路径预测与碰撞风险分析、避障策略选择和航线重新规划等技术。这涉及了感知传感器构型设计、多源信息融合、智能目标识别、障碍物危险评估与避障决策等诸多领域,同时还与空域管理、飞行安全规划等政策法规相关,需要开展专项研究。
eVTOL发展展望
一、发展路线图
结合德勤(Deloitte)对eVTOL 行业未来发展态势的分析,考虑到相关技术、适航等因素,提出从2020开始到2030后eVTOL的发展路线,如图11所示。
图11 eVTOL发展路线图
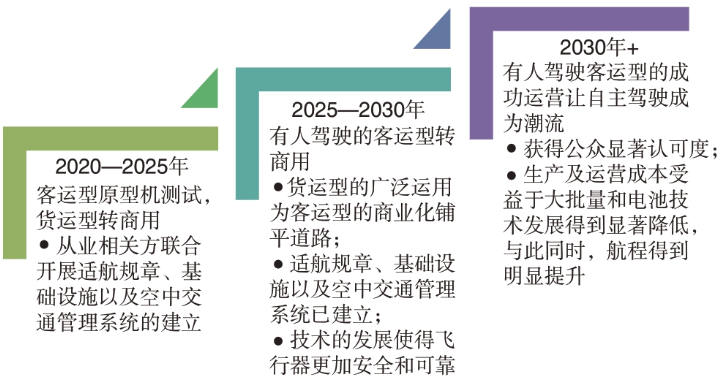
依据eVTOL 载人飞行的成熟度,按照载客和载货(其运行风险相比载客运行要低)两种运营使用模式,可分为三个阶段:
(1)2020—2025 年,实施客运型eVTOL 的原型机测试与验证,实现货运型eVTOL的商业化运行;
(2)2025—2030 年,通过货运型商用铺路,实现有人驾驶客运型eVTOL 的商业化;
(3)2030 年后,依托有人驾驶客运型eVTOL 的商业化成功,伴随民众认可度的显著提升,开展产品升级,实现eVTOL的无人驾驶飞行。
二、主要挑战
尽管eVTOL应用前景广阔,但在进入大众商业化市场之前,还面临着如下几个重大挑战。
(1)技术成熟度:在能量及其管理、自主飞行控制、态势感知与避障等技术领域还需进一步提升;
(2)适航规章:适航审定规章的制定及其符合性方法,以及解决如何运营的问题(包括驾照、空域等);
(3)基础设施:起降场地,停靠、充电及维修、应用管理终端(基于Uber类似的应用)的建立等;
(4)空中交通管理:高效、安全、统一的空中交通管理(面对数量庞大的eVTOL飞行器)包括空域分配、航线管理等;
(5)公众认可:一方面,其便捷性、经济性和安全性还有待时间的检验;另一方面,对于自主飞行器,民众在心理上短时间还难以接受。
结束语
近年来,eVTOL在城市空中交通运输领域的应用受到越来越多的关注,在世界范围内也得到了一些大型公司(如Airbus、Boeing、Uber 等),以及很多初创企业的立项研制,FAA和欧洲航空安全局(EASA)如今已收到不少eVTOL主制造商的适航申请,且EASA 自2019 年起已先后发布垂直起降飞行器的专用技术条件和符合性验证方法,为eVTOL进入商业化提供了准入证。
此外,伴随着无人自主飞控、态势感知与避障等关键技术的突破和电池及能源等产业的发展,eVTOL 自身的成功研制障碍会越来越少,但对于eVTOL进入大众市场开展广泛的商业运营服务,还需结合城市空中交通运输整个生态系统来进行统筹规划和建设,应对配套基础设施、空中交通管理等方面面临的挑战,实现eVTOL产业的安全、环保、高效和可持续发展。