【SLAM】坐标系变换与外参标定
news2026/2/15 11:39:26

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1005426.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
论文笔记:Deep Representation Learning for Trajectory Similarity Computation
ICDE 2018
1 intro
1.1 背景
用于计算轨迹相似性的成对点匹配方法(DTW,LCSS,EDR,ERP)的问题: 轨迹的采样率不均匀 如果两个轨迹表示相同的基本路径,但是以不同的采样率生成,那么这…

uni-app 之 下拉刷新,上拉加载,获取网络列表数据
uni-app 之 下拉刷新,上拉加载,获取网络列表数据 image.png
<template><view><!-- 车源模块 -->--- uni.request 网络请求API接口 ---<view v-for"(item) in newsArr" :key"item.id" style"display: fle…

uniapp使用Vue2框架生成二维码
1. 生成二维码插件
npm install qrcodejs2 --save
上代码:
<template><view><view class"page" ><div id"qrCode" ref"qrCodeDiv" ></div></view><view class"page">核…

微信小程序音频后台播放功能
微信小程序在手机息屏后依旧能播放音频,需要使用 wx.getBackgroundAudioManager() 方法创建后台音乐播放器,并将音乐播放任务交给这个后台播放器。
具体实现步骤如下:
小程序页面中,使用 wx.getBackgroundAudioManager() 方法创…

springMVC1之ModelAttribute注解
什么叫先执行 只要控制器方法一过来, 这个控制器里面的所有方法都会比下面执行的慢一点 我们来访问一个页面 也就是说访问的是控制器里面下面这个方法 看一下控制台执行效果 还是shouUser先执行了 什么叫如果没有提交的字段使用原来的数据 比如下面这个方法 我们在调…
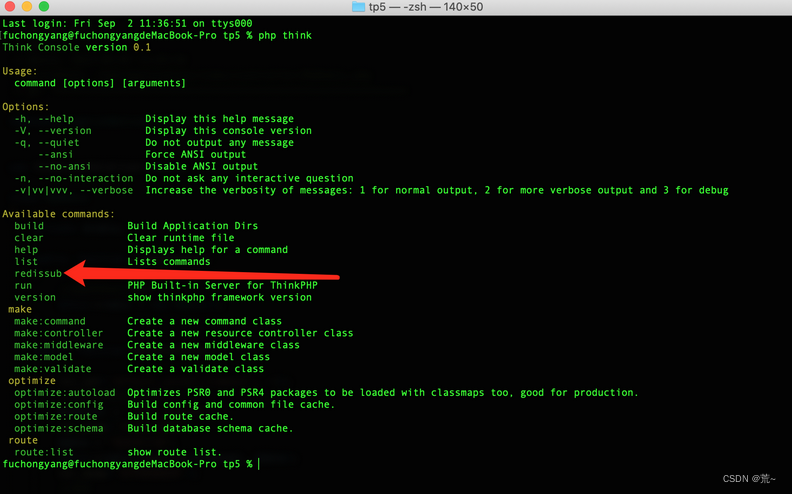
php高级 TP+Redis实现发布订阅和消息推送案例实战
Redis 的发布-订阅模型是一种消息通信模式,它允许客户端之间通过特定的频道进行通信。在这种模型中,有些客户端负责发布消息(发布者),而其他客户端则订阅它们感兴趣的频道并接收这些消息(订阅者)…
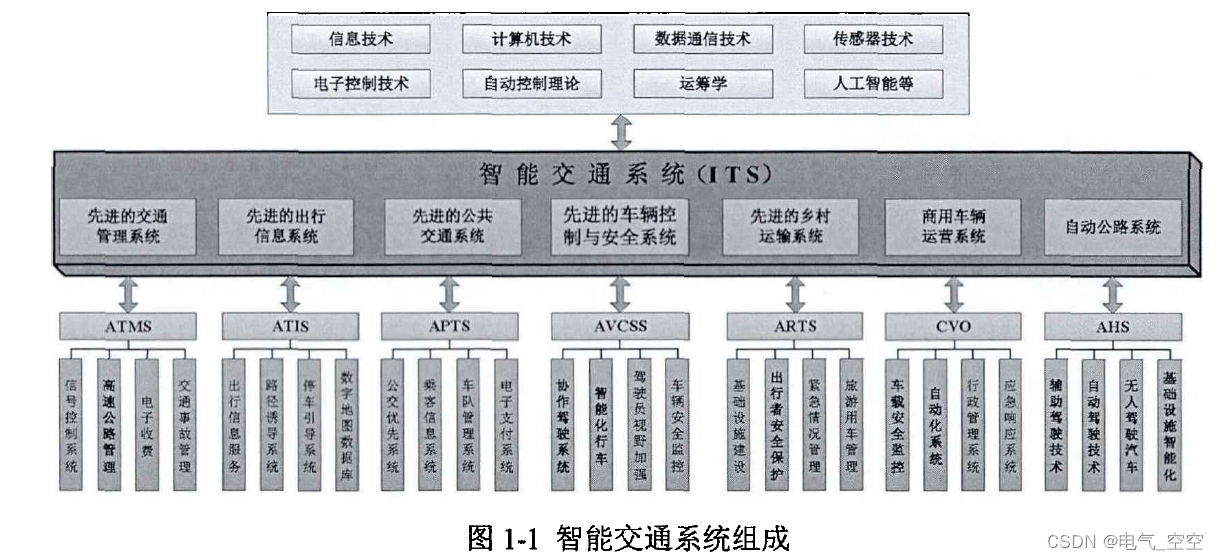
自动驾驶汽车下匝道路径优化控制策略研究
摘要 随着社会不断进步, 经济快速发展, 科学技术也在突飞猛进, 交通行业是典型的领域之一。现阶段的交通发展W 实现智能交通系统为目标, 正逐渐从信息化步入智能化,朝着智慧化迈进。近年来,一系…
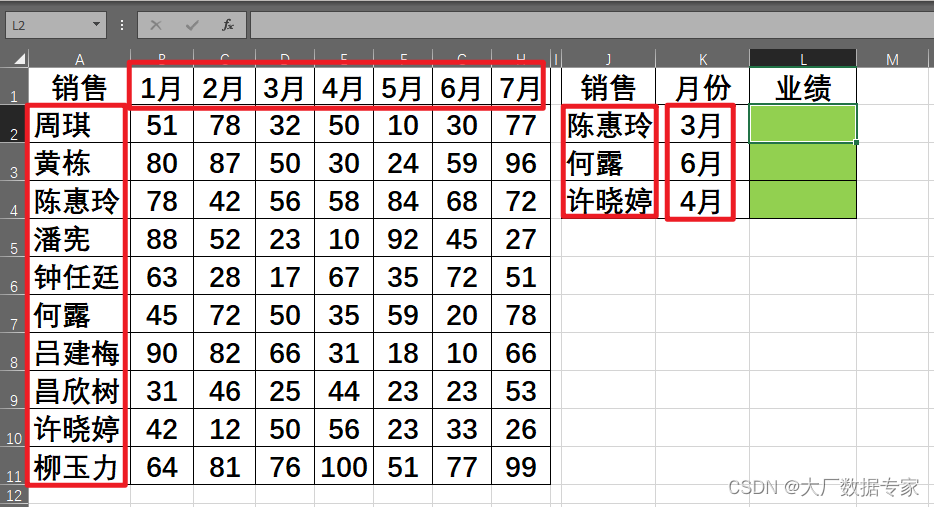
ChatGPT AIGC 实现Excel行列多条件交叉查找
查找函数在Excel中一直是非常重要的知识点,我们让ChatGPT AIGC来总结一下关于查找函数的优点与了处。 Excel中的查找函数是一种非常强大且多用途的工具,具有以下优点和作用:
1. 数据定位:查找函数可以帮助我们在大量数据中快速定位某个特定的数据或信息。 2. 数据整理:如…
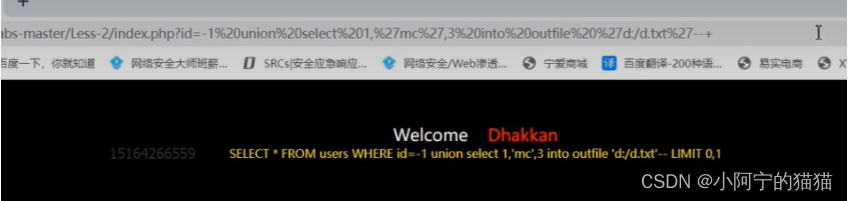
sql注入之高权限注入和文件读写
死在山野的风里,活在自由的梦里 sql注入之高权限注入 高权限注入1.多个网站共享mysql服务器2.MySQL 权限介绍3.注入流程查询所有数据库名称查询表名对应的字段名查询数据 文件读写1.文件读写注入的原理2.文件读写注入的条件3.读取文件4.写入文件 高权限注入
在数据…
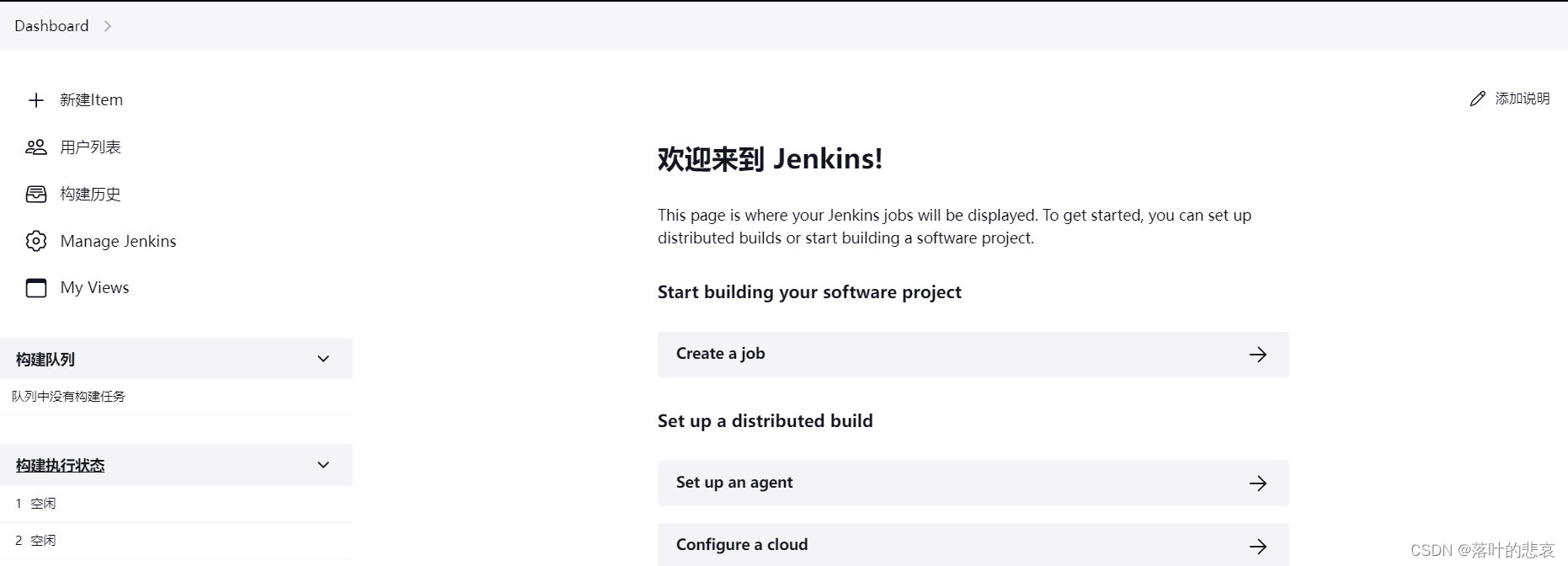
linux jenkins2.414.1-1.1版本安装
文章目录 前言一、rpm文件下载二、安装jenkins2.1.升级jdk1.82.2安装jenkins2.3 启动服务2.4 使用密码登录2.5 修改插件源2.6 汉化插件安装演示 总结 前言
之前也安装过jenkins,但是那个版本是2.1的,太老了很多插件都不支持,现在安装目前为止…
2022年全国研究生数学建模竞赛华为杯D题PISA架构芯片资源排布问题求解全过程文档及程序
2022年全国研究生数学建模竞赛华为杯
D题 PISA架构芯片资源排布问题
原题再现: 一、背景介绍 芯片是电子行业的基础,在当前日益复杂的国际形势下,芯片成了各个大国必争的高科技技术。本课题关注网络通信领域的交换芯片,传统的交…
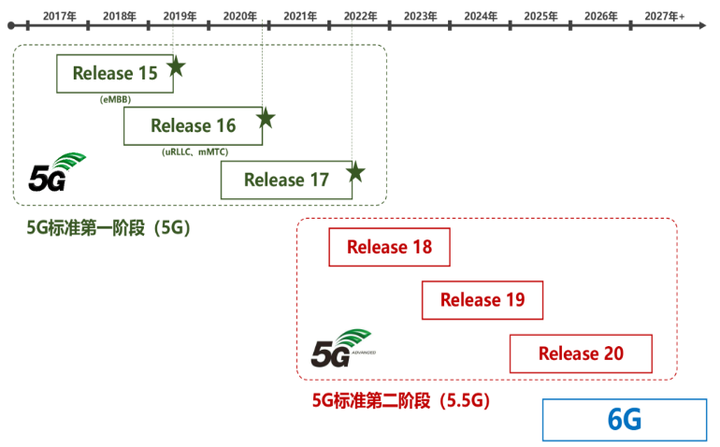
5.5G的技术原理和应用场景
引言
5.5G即5G-Advanced,是一种移动通信技术。 这个解释显然十分的boring,但是在5.5G还未正式进入大家生活的今天,这是百度词条给出为数不多的解释。
当今社会,移动通讯已成为人们生活中不可缺少的一部分。2G打开了文本时代&…
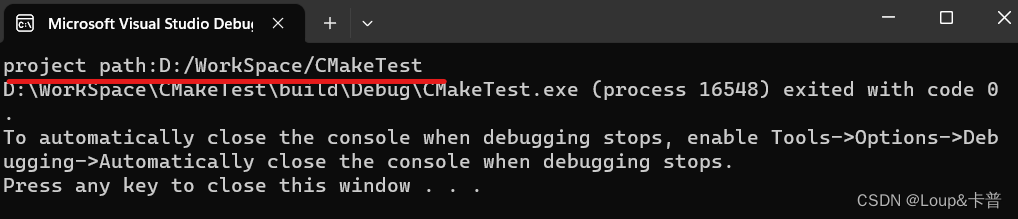
C/C++ 代码中使用 CMake 工程目录
C/C 代码中使用 CMake 工程目录 文章目录 C/C 代码中使用 CMake 工程目录使用原因如何使用参考链接 使用原因
在 C 代码中获取工程路径有点麻烦,因为如果生成的可执行文件(.exe) 位置与工程目录不同,则当前的路径为运行时的路径,可能需要通过…

H.265 视频在浏览器中的播放问题探究
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🐅🐾猫头虎建议程序员必备技术栈一览表📖: 🛠️ 全栈技术 Full Stack: 📚…
华为OD机考算法题:MVP争夺战
目录
题目部分
解读与分析
代码实现 题目部分
题目MVP争夺战难度易题目说明在星球争霸篮球赛对抗赛中,强大的宇宙战队,希望每个人都能拿到MVP。 MVP的条件是,单场最高分得分获得者,可以并列,所以宇宙战队决定在比赛…
【Axure高保真原型】桥梁监控大屏可视化案例
今天和大家分享桥梁监控大屏可视化案例的原型模板,包括桥梁预警次数统计、预警类型分析、实时预警分析、通行趋势分析、通行类型分析、热门桥梁分析,里面包含多个高保真的图表模板(多柱状图组、滚动列表、多面积图、排名图、玫瑰图࿰…
(未完成)【Redis专题】一线大厂Redis高并发缓存架构实战与性能优化
前言
在本章内容里,我希望大家还是要先看看【前置知识】的内容。按照我的大纲设计,我是想先给大家抛出一些大家比较陌生的,关于【Redis缓存问题以及缓存方案】的一些名词概念,再然后在正文【课程内容】里面给大家使用源码案例&am…

SQL9 查找除复旦大学的用户信息
描述
题目:现在运营想要查看除复旦大学以外的所有用户明细,请你取出相应数据 示例:user_profile
iddevice_idgenderageuniversityprovince12138male21北京大学Beijing23214male复旦大学Shanghai36543female20北京大学Beijing42315female23浙…

postman连接websocket, 建立连接、聊天测试(v8.5.1)
1. postman v8.5版本 以上支持 websocket。 2. 选择websocket请求模块File - New... 3. WebSocketServer.java import org.springframework.stereotype.Component;
import javax.websocket.*;
import javax.websocket.server.PathParam;
import javax.websocket.server.Server…