

参数标定:
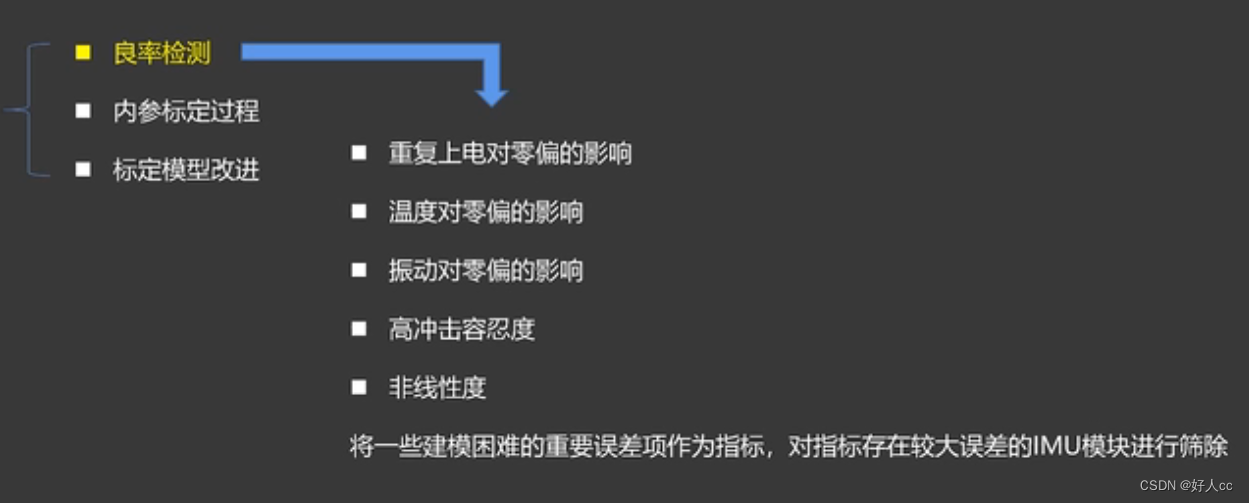
良率检测
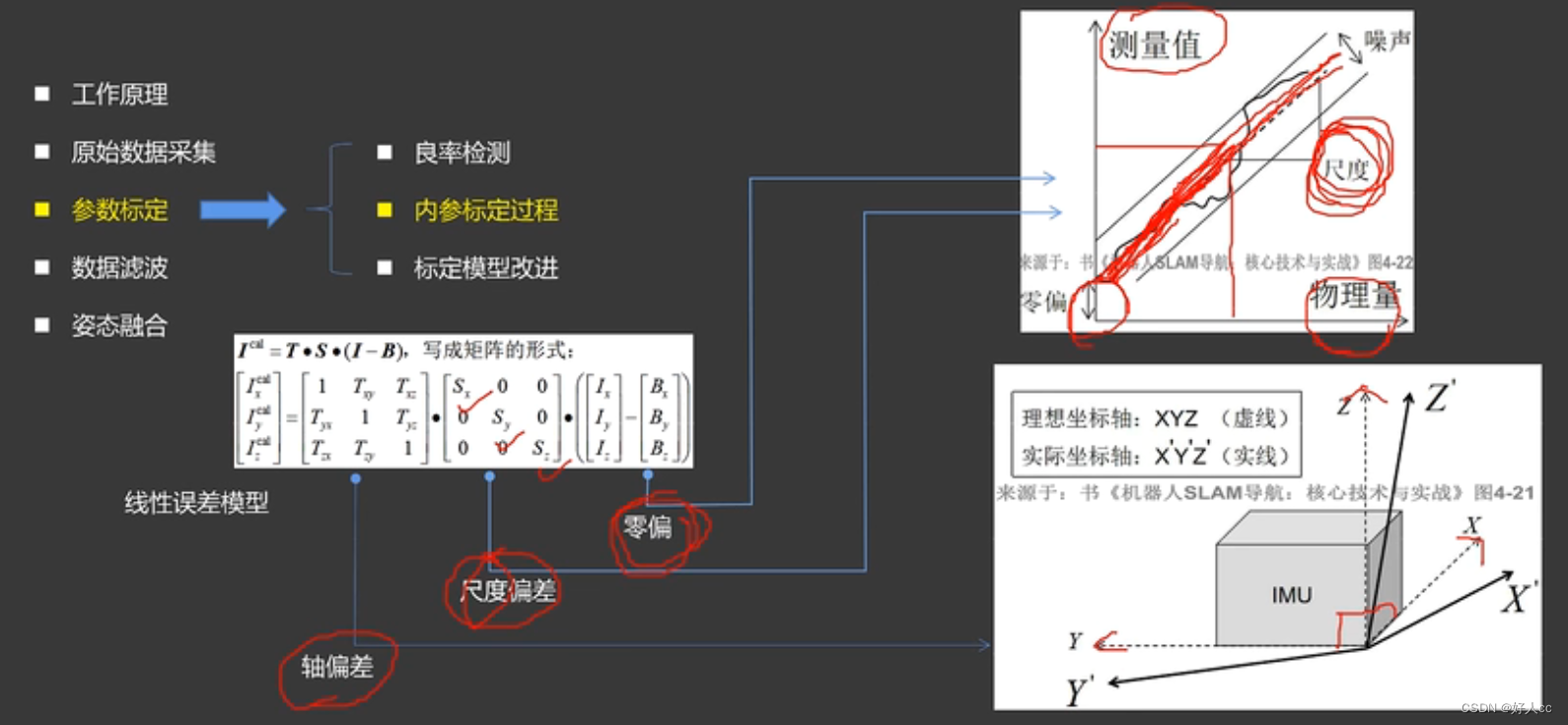
内参标定过程
1.线性误差模型
零偏:静止时的误差
尺度偏差:每个轴上电压到实际值之间的比例差值 1->1.5 或者 1->1.3(直线的斜率)
轴偏差: 如下图
2.标定过程:
2.1角加速度标定
重力约束条件:不同状态下加速度分量之和=当地重力加速度g
构建最小二乘,求参
2.2陀螺仪标定(角速度)
约束:通过加速度合成后向量的指向,能推出姿态角,两帧之间通过加速度能获得一个位姿,通过陀螺仪的积分也能求一个位姿角,两个位姿角相等,如果不一样,构建最小二乘修改陀螺仪参数。
2.3磁力计
三轴分量合成=地磁磁场值
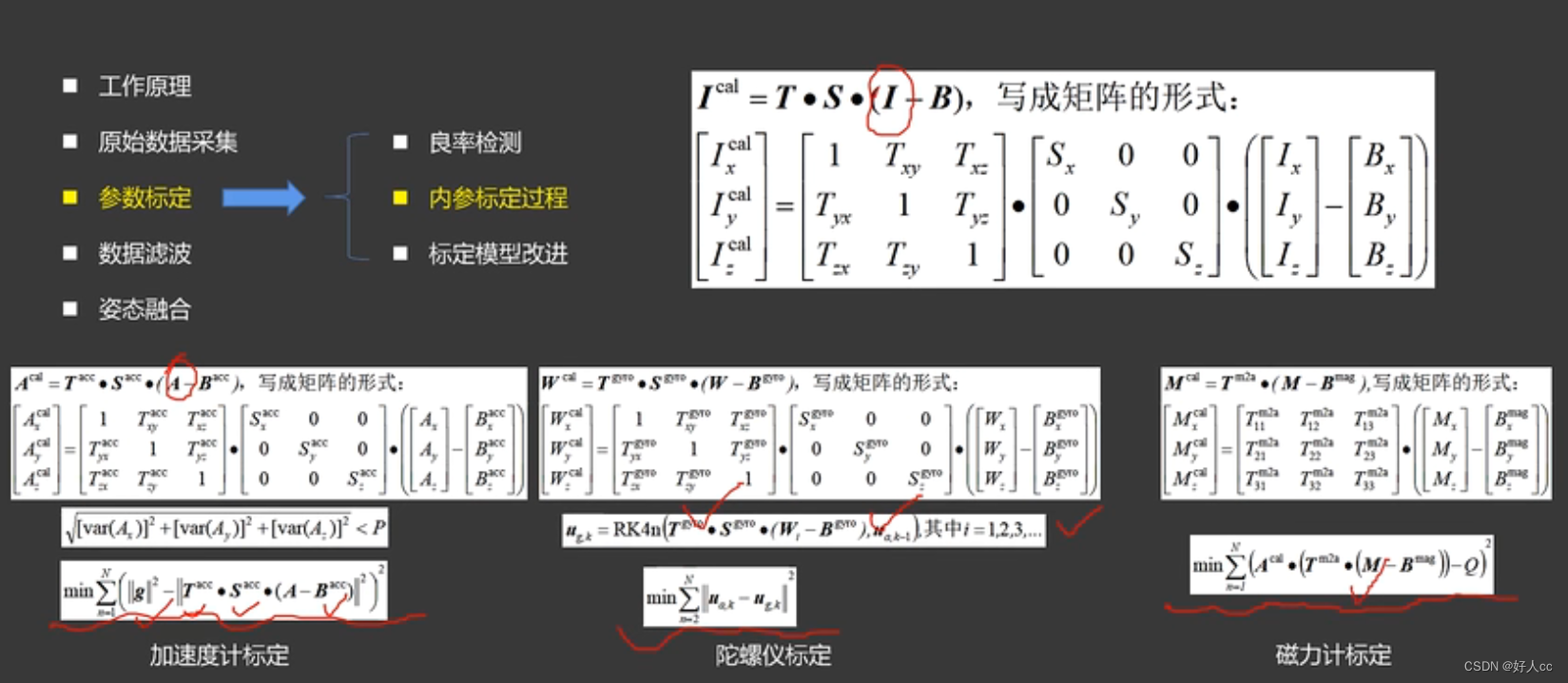
加速度计的标定利用了加速度计在静止状态下的三轴数据模值等于重力加速度这一条件,采集加速度计在不同状态的静止数据,通过优化算法即可求出标定参数。加速度计单独即可完成标定,陀螺仪的标定需要加速度计数据的参与,所以需要先标定好加速度计。在标定陀螺仪时,IMU从静止状态A,通过一段时间,到了静止状态B,通过陀螺仪可以算出来A到B的旋转矩阵,而通过加速度数据也可以算出来A到B的旋转矩阵,最小化这一差异即可实现优化求解。
3.标定模型改进
温度,重力,轴间敏感性,allan方差
数据滤波


姿态融合
imu_tk源码分析与效果测试 - 知乎 (zhihu.com)





![python 虚拟环境调用allure报错:FileNotFoundError: [WinError 2] 系统找不到指定的文件](https://img-blog.csdnimg.cn/07f9c155cdc64913bffc545c28132e68.png)